多体动力学模块更新
COMSOL Multiphysics® 5.2a 版针对“多体动力学模块”的用户引入了对齿轮建模的功能,此项功能对动力传输和汽车仿真非常有用。 为便于建立模型,“零件库”中添加了各种齿轮零件,许多新增的教程模型对此项用户驱动功能的应用潜力进行了演示。 请阅读下文来了解“多体动力学模块”的完整更新。齿轮建模
多体动力学接口中添加了齿轮建模功能,您可以对用于动力传输的齿轮传动系统进行建模。 此功能提供了适用于多种齿轮和齿条类型的节点,包括: 直齿轮、斜齿轮、锥齿轮、蜗轮、直齿条及斜齿条。 要将一个齿轮连接到其他齿轮,只需将以下节点添加到“模型开发器”的模型树中: 齿轮副、蜗杆蜗轮副及齿轮齿条副。
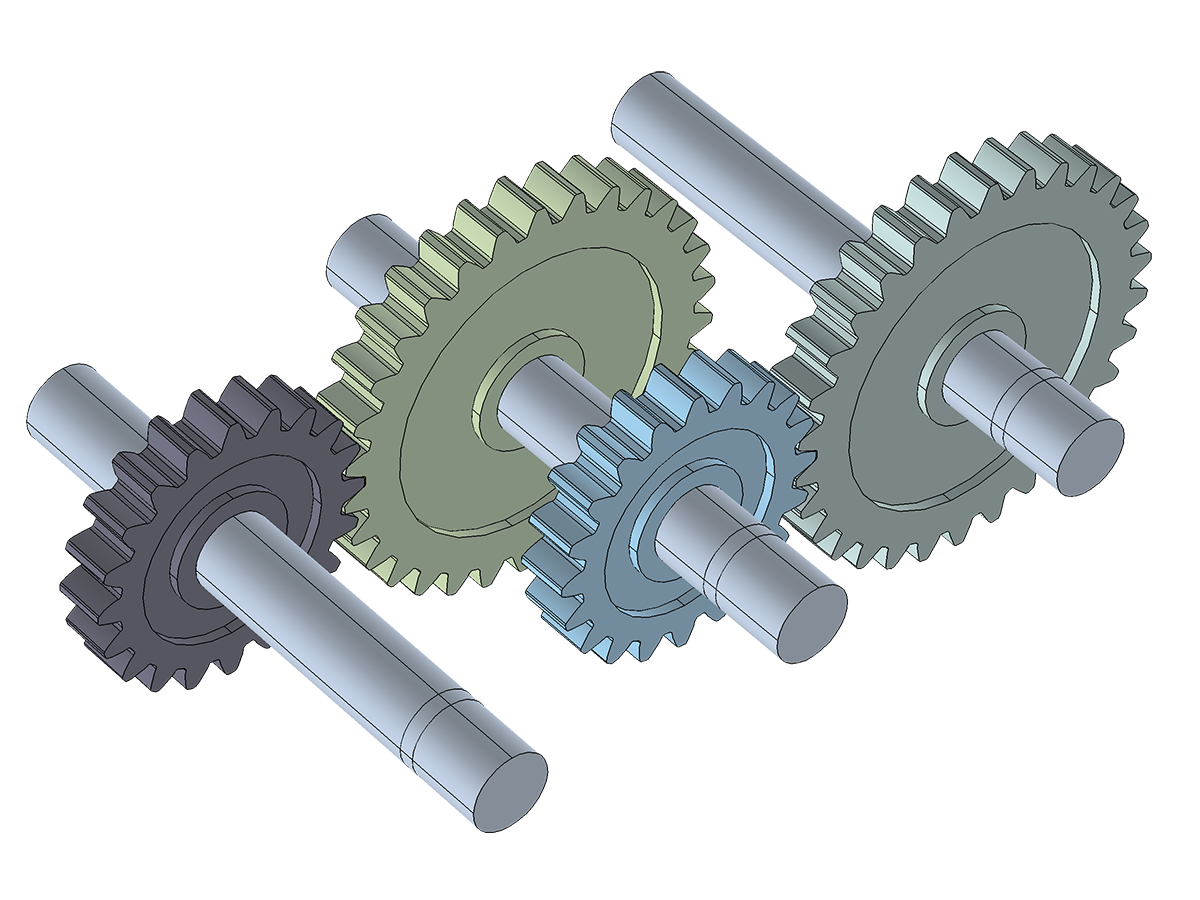
使用多体动力学接口中的新增齿轮功能建模的复合轮系。
使用多体动力学接口中的新增齿轮功能建模的复合轮系。
在“模型开发器”中,齿轮被定义为刚体。而且,也可以在将齿轮连接到其他齿轮时为齿轮啮合指定有限刚度。在“模型开发器”中,齿轮弹性节点可以作为子节点添加到齿轮副节点,定义齿轮啮合的弹性属性,如啮合刚度、啮合阻尼和接触比。
齿轮副可以假定为没有任何静态传动误差或齿隙的理想齿轮。存在静态传动误差(可能由几何误差和几何修改引起)时,传动误差子节点可以添加到齿轮副节点中。此类示例包括齿轮跳动、齿轮不同心或发生齿尖和齿根卸荷。同样,如果存在影响系统动力学的齿隙,则齿隙子节点也可以添加到齿轮副节点中。
此外,摩擦子节点也可以添加到齿轮副节点,在接触点上考虑摩擦力。仅当接触点存在明显滑移时,摩擦力才产生影响。滑移可能由中心距离的改变引起,也可能是由于两个齿轮的轴既不平行也不相交。蜗杆蜗轮副便是这种工作方式的一个示例,即使在理想状态下仍存在固有滑移。
显示齿轮建模的“App 库”路径示例如下: Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear
Multibody_Dynamics_Module/Tutorials/gear_train
Multibody_Dynamics_Module/Tutorials/helical_gear_pair
Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
零件库中的齿轮
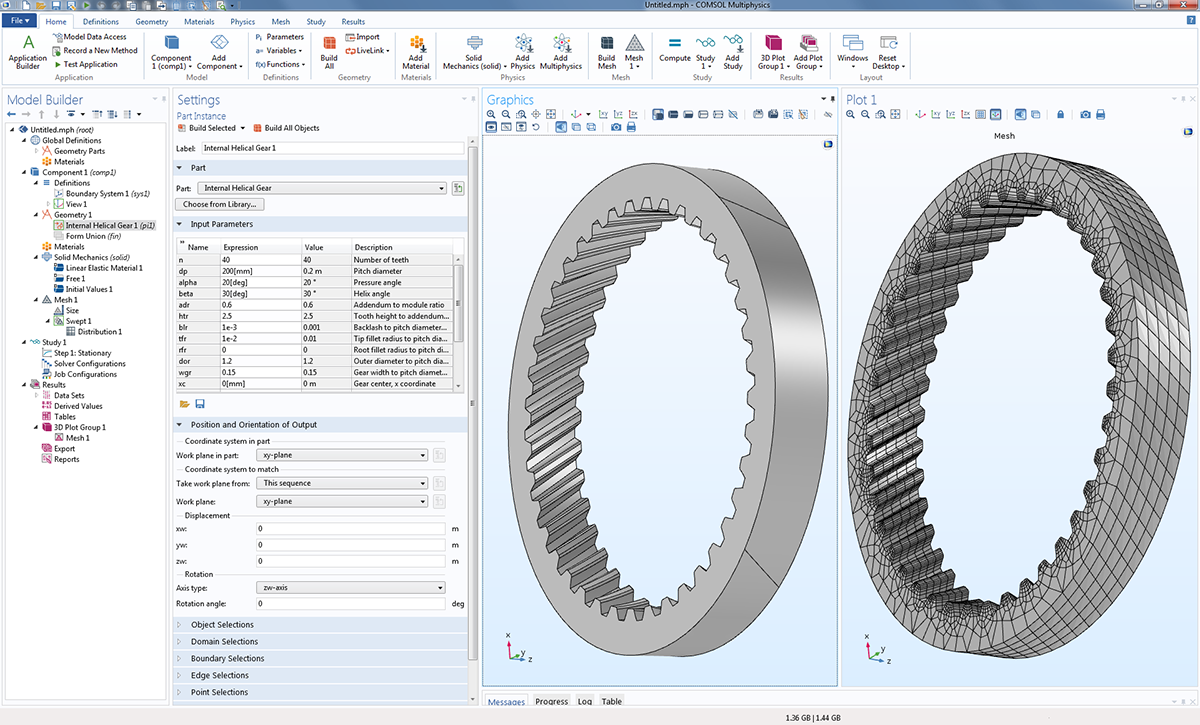
“零件库”中添加了许多参数化齿轮几何,可以使用这些零件来创建不同类型齿轮的三维和二维模型。可以修改零件的输入参数,定制齿轮齿和齿轮毛坯形状。这些零件可用于构建齿轮齿、单极齿轮、齿轮副或平行/行星轮系。
可用的齿轮零件可分为三类:
-
外部齿轮
- 直齿轮
- 斜齿轮
- 锥齿轮
- 蜗轮
-
内部齿轮
- 直齿轮
- 斜齿轮
-
直齿轮
- 直齿条
- 斜齿条
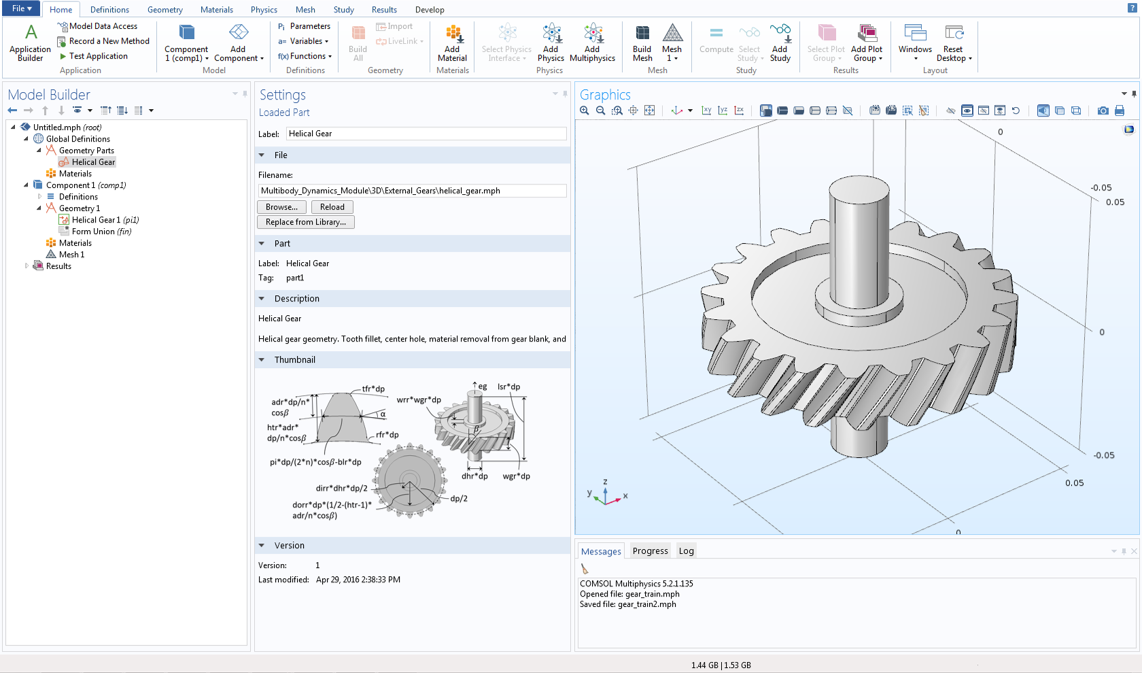 使用“多体动力学模块”的“零件库”中提供的齿轮零件创建的斜齿轮几何。
使用“多体动力学模块”的“零件库”中提供的齿轮零件创建的斜齿轮几何。
{kind=link}
新教程模型:差动轮系机构
此模型模拟汽车及其他轮式车辆中使用的差动轮系机构。差动齿轮允许在转动时,外驱动轮比内驱动轮旋转得更快。在车辆转弯时这一点非常重要,可以使沿转弯曲线外部行驶的车轮转动更快,并且比转弯曲线内部的车轮行驶的距离更远。两个驱动轮的平均转速即为传动轴的输入转速。一个车轮速度的提高可通过降低另一个车轮速度来达到平衡。
在车辆沿直线或弯曲路线行驶的情况下,我们执行瞬态分析来计算星形齿轮的运动。分别针对这两种情况来计算不同组件的速度大小以及内外侧车轮的角速度。
演示差动轮系机构的教程模型的“App 库”路径为:
Multibody_Dynamics_Module/Automotive_and_Aerospace/differential_gear
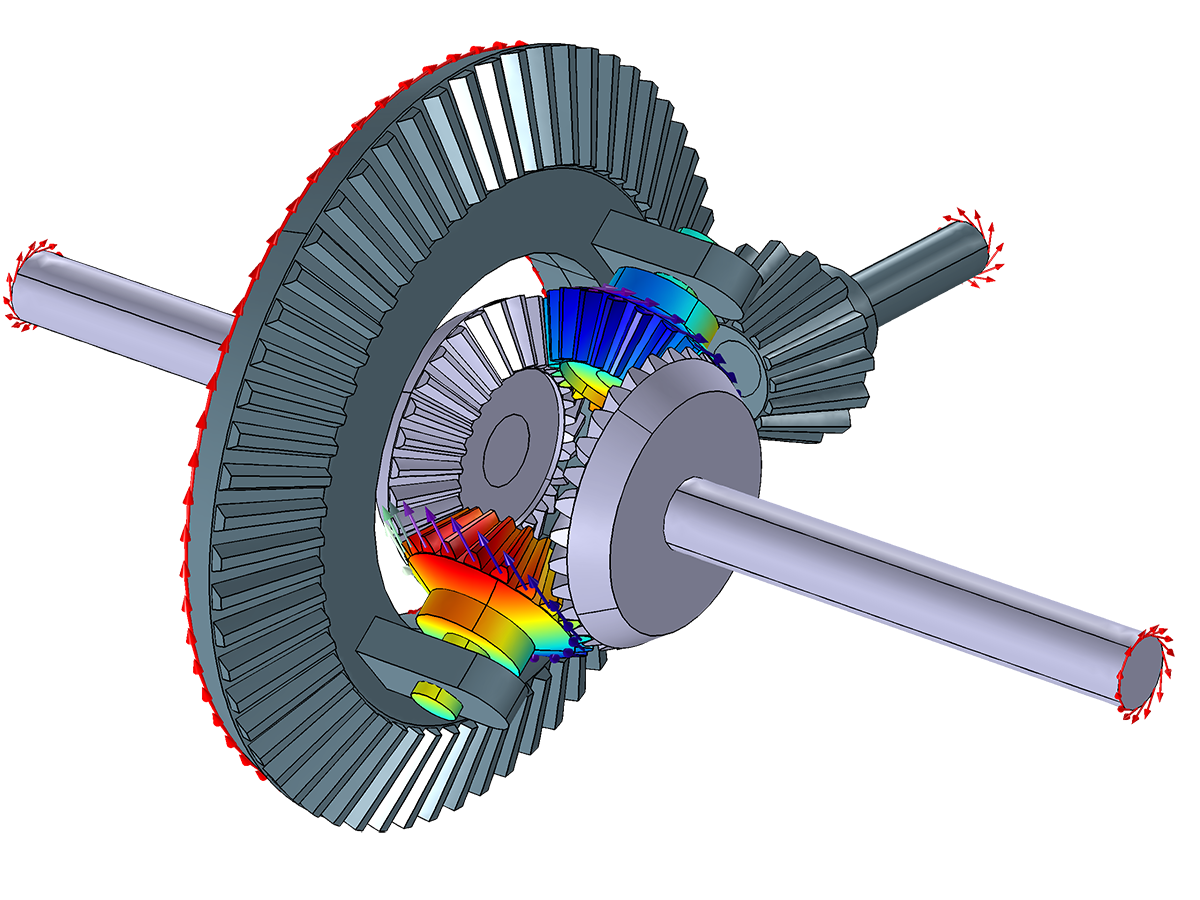 允许车辆的两个轴以不同速度转动的差动轮系机构。显示了旋转的速度大小和方向。
允许车辆的两个轴以不同速度转动的差动轮系机构。显示了旋转的速度大小和方向。
新教程模型:复合轮系中的振动
此模型模拟复合轮系中的振动。用于对轮系建模的直齿轮安装在刚性轴上,轴的两端由弹性外壳支撑。假定齿轮啮合发生变刚度的弹性变形,这是持续振动的根源。执行瞬态分析来计算齿轮的动力学及外壳的振动。
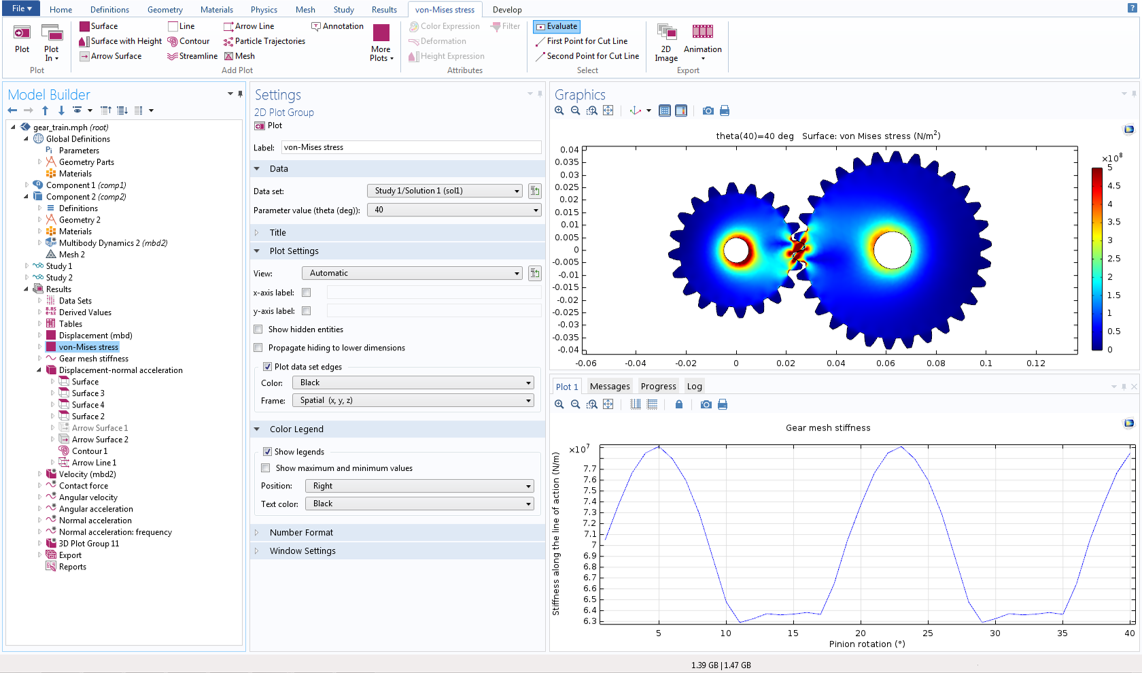
使用了接触建模来计算齿轮啮合刚度。执行参数化分析将齿轮啮合刚度作为一个啮合周期中齿轮转动的函数进行计算。
模型计算了齿轮副中的 von Mises 应力分布,其中,接触点和齿根处的应力较高。还计算了齿轮啮合刚度、齿轮中的位移以及外壳中由振动引起的法向加速度。
教程模型的“App 库”路径为:
Multibody_Dynamics_Module/Tutorials/gear_train
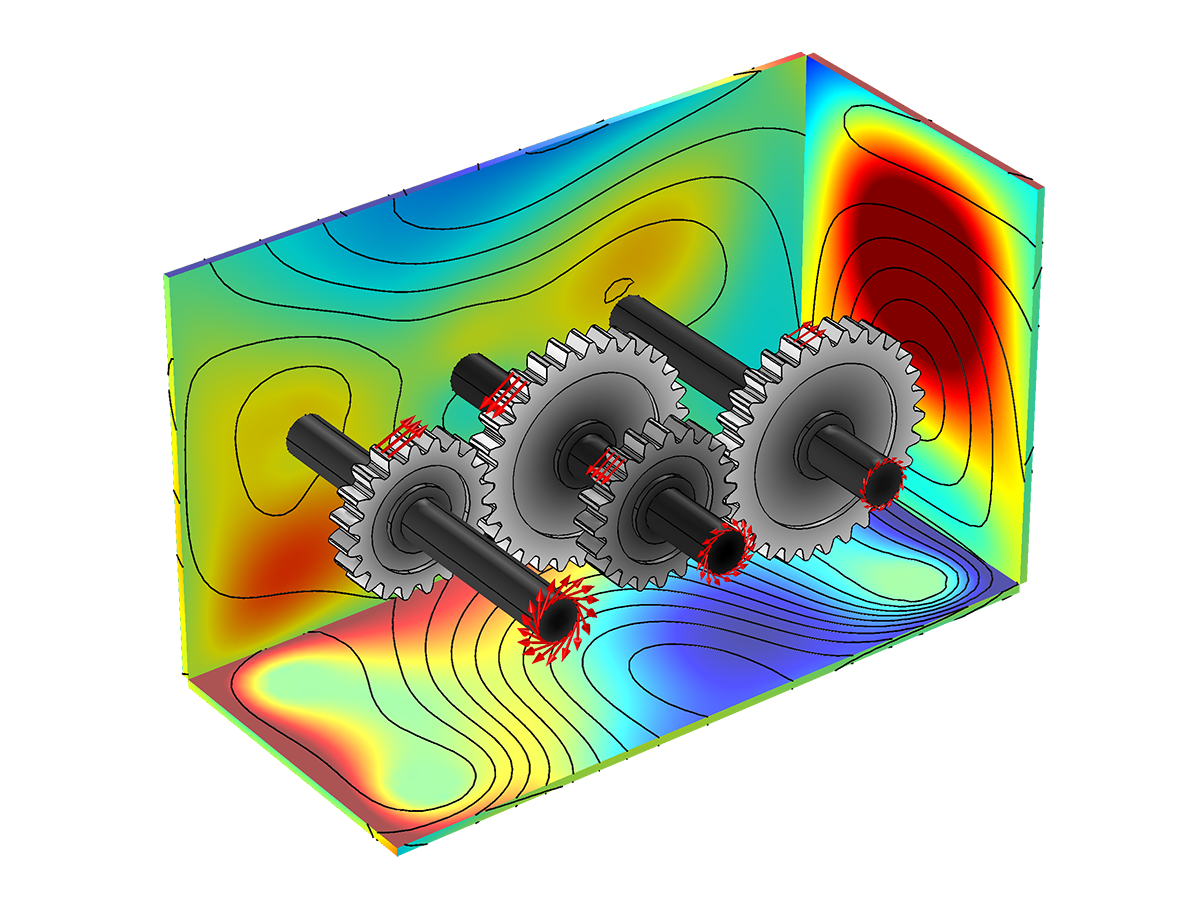 由弹性齿轮啮合引发的振动所产生的外壳中的法向加速度。还显示了齿轮位移的灰度图。
由弹性齿轮啮合引发的振动所产生的外壳中的法向加速度。还显示了齿轮位移的灰度图。
{kind=link}
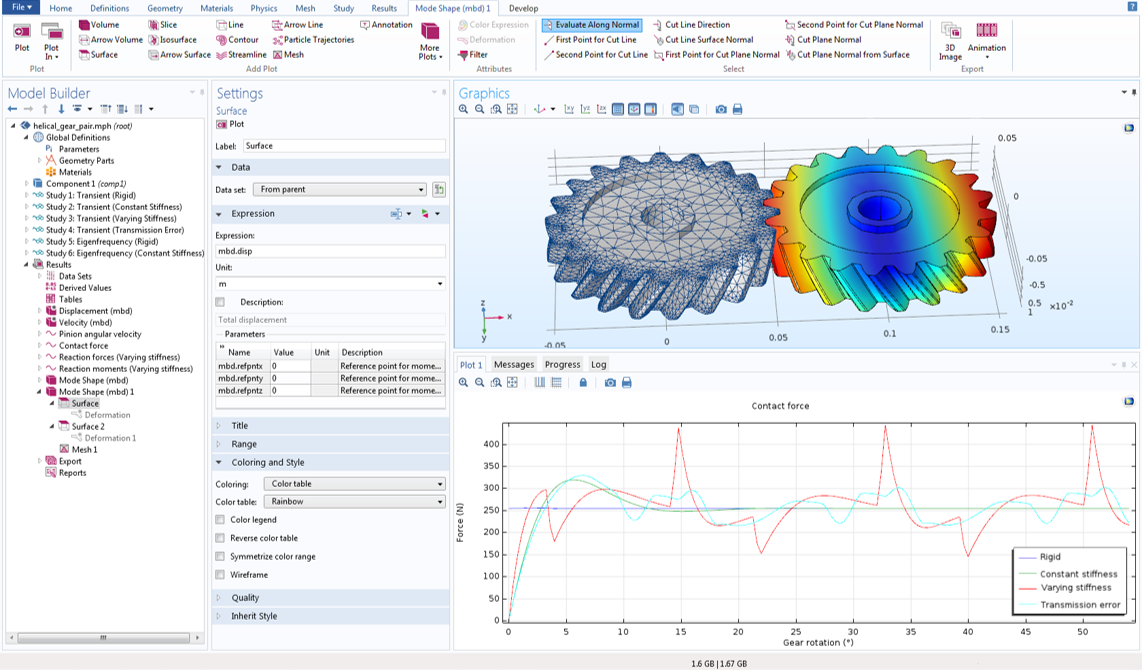
新教程模型:斜齿轮动力学
此教程模型演示了斜齿轮动力学。本例考虑的是假定齿轮啮合为刚性或弹性的情况。执行瞬态研究来分析恒定齿轮啮合刚度、变齿轮啮合刚度、接触力传动误差以及齿轮角速度的效应。执行特征频率分析来计算齿轮副的刚性和弹性齿轮啮合的固有频率和振型。
教程模型的“App 库”路径为:
Multibody_Dynamics_Module/Tutorials/helical_gear_pair
{kind=link}
新教程模型:锥齿轮的力和力矩
此教程模型模拟直锥齿轮副。齿轮作为刚性建模,其中一个齿轮被固定,而另一个齿轮则铰接在刚性杆上。刚性杆也铰接在固定齿轮的轴线的某个点上。执行瞬态分析来计算固定齿轮中心的力和力矩,将分析结果与国际期刊参考文献中的结果进行比较。
教程模型的“App 库”路径为:
Multibody_Dynamics_Module/Verification_Examples/bevel_gear_pair
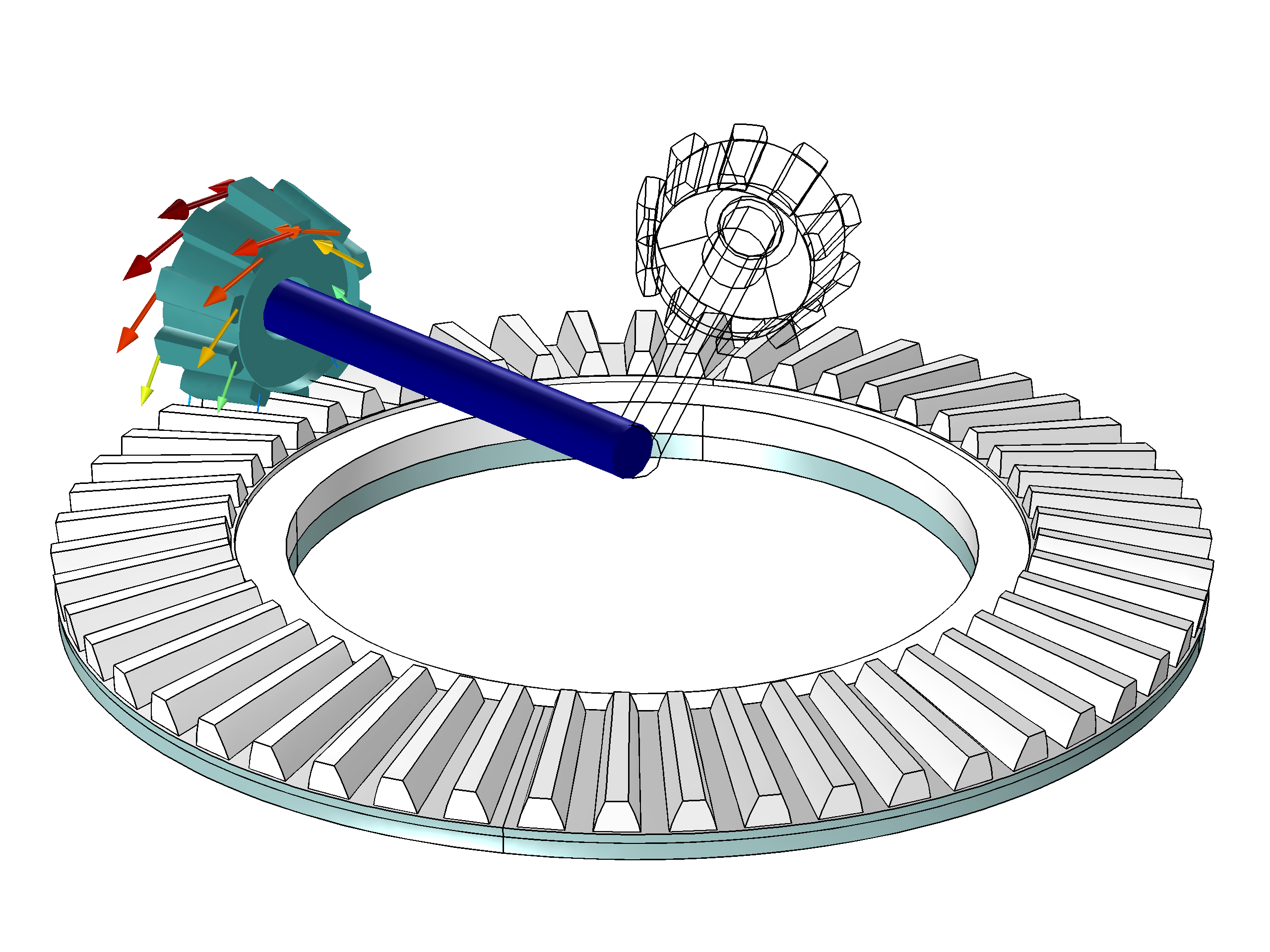 指定刚性杆的渐进旋转时锥齿轮的运动情况。
指定刚性杆的渐进旋转时锥齿轮的运动情况。