描述
本文包含求解结构接触模型的指导信息,以及实现收敛解应遵循的过程。
背景
在结构接触建模中,您需要处理高度非线性问题。随着表面相互接触并脱离接触,载荷路径和应力状态将发生突变。COMSOL Multiphysics 中的数值求解器计算的解预计具有一定的光滑性,因此求解此类模型本质上富有一定的挑战性。大多数接触模型都需要我们对默认的模型设置进行一些更改才能有效求解。
接触建模指导信息
几何
如果您的几何包含彼此相邻并具有配对边界的零件,则应将定型方法设为形成装配,并选择接触对作为创建对的对类型。这将在对象的配对边界之间自动创建“接触对”。有关“形成装配”用法的更多详细信息,请参见知识库文章 1216。对于最初没有接触但在仿真过程中将发生接触的边界,您需要在这些边界组之间手动创建“接触对”。
如果您预计模型中的任何尖角和表面之间会发生接触,则应修改几何结构,将尖角替换为圆形边界(圆角)。圆角半径可以非常小,并且您需要对该表面进行非常细化的网格划分。
定义
手动和自动创建的所有接触对均在以下位置定义:组件 > 定义 > 接触对。
在接触对定义中,选择刚性较大的零件作为源。如果各个零件的刚度相似,则将凹形零件设为源,凸形零件设为目标。为此,您可以使用交换源和目标按钮。为了提高效率,在每个接触对中仅包含可能发生接触的边界。
如果您预计接触边界之间几乎没有滑动(例如,热压配合或两个零件通过螺栓固定在一起时),则转到接触对 > 高级设置,将映射方法改为初始配置。系统将基于域的初始位置仅计算一次源和目标边界之间的映射,因此,收敛速度更快且更稳定。
固体力学
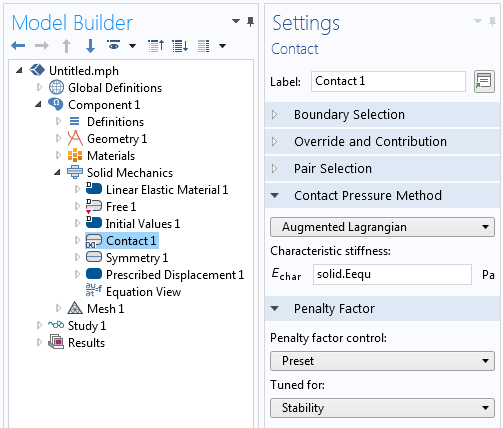
您可以在固体力学接口中添加接触特征。单个接触特征可同时应用于所有“接触对”定义。在“接触”特征中,选择增广拉格朗日或罚作为“接触压力方法”。增广拉格朗日法的精度更高,但计算成本也较高,并需要更多微调才能收敛。罚函数法的精度相对较低,但更稳健,并且所需的求解器调整更少,因此更适用于求解多物理场问题和瞬态模型。在对黏附建模时,必须使用罚函数法。
使用增广拉格朗日公式时,可以通过“罚因子”来控制迭代过程中界面表面的“坚硬”程度,但不会直接影响收敛结果。默认的“罚因子”包含两个预设微调选项:稳定性(默认设置)或速度。如果接触零件在仿真开始时处于接触状态,则“速度”是首选设置。有关手动调整“罚因子”的指导信息,请参见“知识库”条目1171。不过,仅当您完成本“知识库”条目中的所有其他建议设置后,才应手动调整“罚因子”。
如果一个零件的刚度明显大于其他零件,则其挠度相对可以忽略不计,我们通常可以将其视为刚性零件。这是一个简化假设,可以使问题更容易求解。为了应用这一假设,您可以在刚性域中添加指定位移条件。您可以在刚性域的任何平面边界上使用非常粗化的网格,但仍需对所有弯曲的接触边界使用细化网格。刚性零件应作为“接触对”中的源。可变形域边界上的网格需要足够细化,才能为接触补片和应力状态提供良好的分辨率。
比较好的做法是对模型中将要发生接触的所有域应用指定位移约束。与仅包含外加载荷、力和接触条件(但这些条件不受约束)的域情况相比,这样更容易求解。如果可以重新用公式表示这个问题,以便对所有域施加一些初始约束,请执行此操作。
如果您必须对最初不受约束的域建模,可以在这些不受约束的可变形域(或这些域的边界)中添加弹簧基础特征。将弹簧常数的大小最初设为非常大的值,大到足以使因初始外加载荷产生的变形可忽略不计。当弹簧常数减小到零时,由于接触和外加载荷的作用,域将逐渐松弛到其变形的状态。
如果您正在求解静态(稳态)模型,建议在求解过程中使指定位移、载荷以及任意弹簧基础的刚度产生斜坡变化。您可以引入新的全局参数(将其命名,如 RampFactor),并将此因子乘以所有载荷、位移和刚度。您可以在研究设置中定义此参数的斜率。
如果您正在求解时间相关的(瞬态)模型,请确保所有的指定位移、载荷以及任意弹簧基础的刚度均与时间相关,并在物理上合理的时间跨度上发生斜坡变化,这不仅适用于固体力学物理场,而且适用于包含的所有其他物理场(如果是多物理场模型)。相关更多信息,请参见“知识库”条目905。
如果您正在求解瞬态模型但不想考虑惯性效应(如果不希望对结构振动建模),可以转到“固体力学”接口的结构瞬态特性设置,并选择准静态,从而明显加快求解速度。
网格
为接触边界生成足够细化的网格,这一点非常重要。您需要进行手动网格划分。应在接触边界上划分足够细化的网格,才能为接触区域提供良好的分辨率。接触对的目标边界上的网格必须比源边界的细化,且至少细化两倍。弯曲表面上的网格需要比平面更加细化。
研究设置
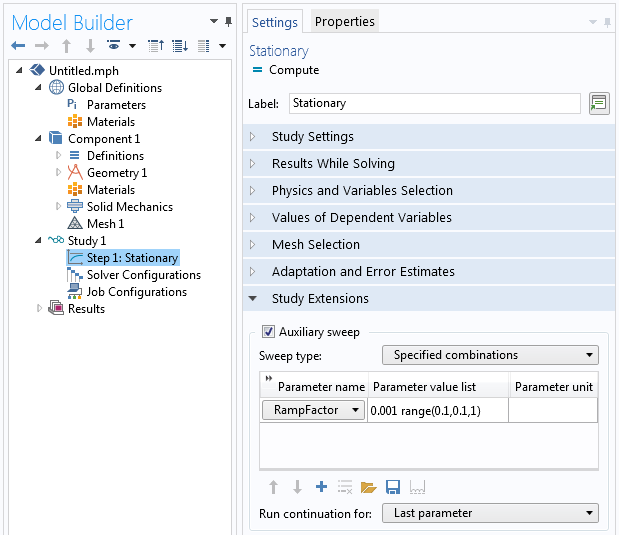
在求解稳态研究时,建议您使无约束域上的指定位移、载荷或弹簧基础产生斜坡变化。首先,您可以引入全局参数(如 RampFactor),并将它乘以所有位移、载荷和刚度。您可以通过“稳态”研究步骤设置中的辅助扫描选项使该参数产生斜坡变化。
外加载荷和位移的斜率应从非常接近零的值开始,此时的接触可以忽略不计,甚至不存在,然后斜率应线性斜升至最大值。例如,下面的屏幕截图显示 RampFactor 从值 0.001 开始,然后以 0.1 为增量从 0.1 增加到 1。默认情况下,软件将使用连续法,其中使用上一个求解步骤中的解作为下一个步骤的初始条件,从而更容易收敛。增量的数量可能需要非常大,并建议您监视斜坡因子为哪些值时,求解器的收敛速度较慢。收敛较慢时,您可以使用更多增量。
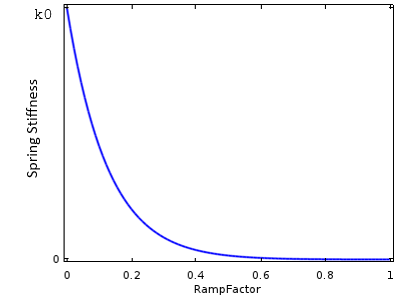
未约束域上的弹簧基础使用的弹簧常数的斜率应从弹簧刚度的峰值开始,然后降至零。在这种情况下,建议使弹簧刚度呈非线性减小。通过使用参数 RampFactor(在 0 到 1 范围内呈线性变化),可以在 Z 方向引入具有弹簧常数 kz 的弹簧基础,其中
kz = k0*(1-RampFactor)*2^(-RampFactor*10)
同样,在需要约束的任何其他方向上也使用这一弹簧基础。您应该选择弹簧刚度的峰值 k0,使完整外加载荷引起的位移约等于接触边界的单元大小。
当一个模型包含弹簧基础和外加载荷时,外加载荷应呈线性斜升,与此同时,弹簧基础的弹簧常数呈非线性斜降(使用上面的表达式),如以下绘图所示。
求解器设置
请尽可能使用默认建议的直接求解器,而不是迭代求解器。迭代求解器需要的内存较少,但收敛速度通常要慢得多。
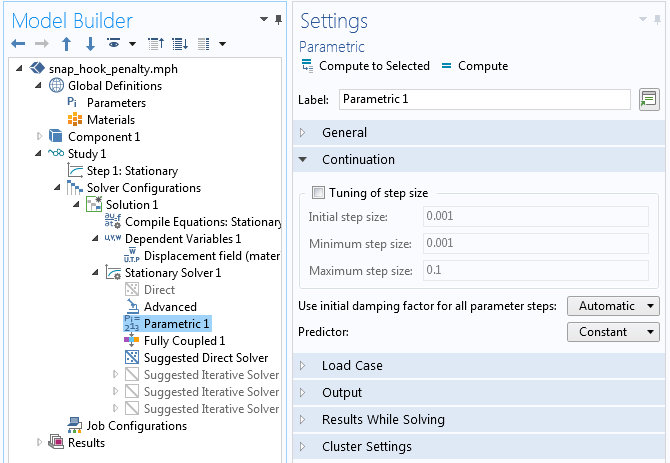
对于包含对斜坡参数进行“辅助扫描”的稳态模型,默认操作是使用“连续”法。在参数化设置中,将预测器改为常数将使收敛更稳定,但速度更慢。下面的屏幕截图显示了此设置。
在使用增广拉格朗日公式时,默认的求解器配置会使用分离方法,其中在单独的“集总步骤”中求解接触压力(如果包含摩擦,则还有摩擦力)。您不应更改此配置。如果您必须修改求解器序列,则仍应保留单独的分离组,并在位移后进行求解。
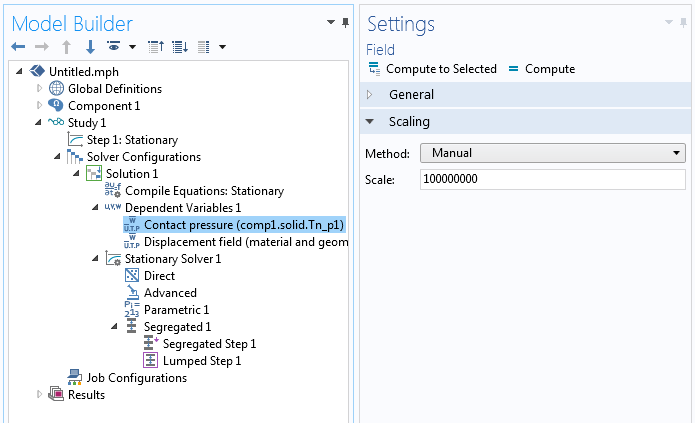
在使用增广拉格朗日公式时,需要手动缩放接触问题中的变量。如果您在求解之前无法估计接触压力,则可能需要分两步进行分析,其中先使用罚公式计算接触压力的估计值。由于在检查收敛性时会使用这一接触压力比例值,因此如果使用的值过大,会存在结果不正确的风险。
摩擦接触建模
摩擦建模通常会显著增加计算时间,因此,如果可以合理地忽略摩擦,我们就将其忽略。摩擦通常只会产生很小的局部影响,并且我们很难得到精确的摩擦系数,所以这种简化实际上是合理的。然而,如果接触边界上存在明显的剪切应力,或者摩擦损耗非常重要,则必须包含摩擦。
如果您的接触仿真确实涉及摩擦,可以先设置不含摩擦的问题并进行求解。找到合适的求解器设置后,添加摩擦并重新求解。由于摩擦力的发展与历史相关,因此,您应该总是使用参数化求解器或瞬态求解器来逐步求解摩擦接触问题。
其他资源
Structural Mechanics Module User's Guide > Structural Mechanics Modeling > Contact Modeling 章节。
COMSOL 尽一切合理的努力验证您在此页面上查看的信息。本页面提供的资源和文档仅供参考,COMSOL 对其有效性不作任何明示或暗示的声明。COMSOL 对所披露数据的准确性不承担任何法律责任。本文档中引用的任何商标均为其各自所有者的财产。有关完整的商标详细信息,请参阅产品手册。