使用偏微分方程(PDE)接口建模:对流-扩散方程
本文为使用偏微分方程(PDE)接口建模系列课程的第 3 部分,我们将对 第 2 部分 中演示的使用扩散方程建模的技术进行扩展,讨论如何通过 系数形式偏微分方程 接口来创建对流-扩散方程模型。
连续性方程
通过分析质量守恒连续性方程,我们可以更好地理解系数形式偏微分方程中一些项的来源。首先,让我们复习一下用于描述流体中质量传递的连续性方程:

其中, 是质量密度,
是质量密度,  是流体的速度,可能来自于流体方程(如纳维-斯托克斯方程)的解。这个 连续性方程 描述了通过对流传递的质量守恒。
是流体的速度,可能来自于流体方程(如纳维-斯托克斯方程)的解。这个 连续性方程 描述了通过对流传递的质量守恒。
连续性方程也可用于化学物质的质量传递。在这种情况下,用摩尔密度或浓度  代替质量密度 。在不发生反应的情况下,方程的形式如下:
代替质量密度 。在不发生反应的情况下,方程的形式如下:

如果把反应计算在内,等式将改为

其中, 称为 反应项。在此,为简化起见,我们假设
称为 反应项。在此,为简化起见,我们假设  。
。
 是质量(或摩尔)通量。对于稳态传递,我们可以得出
是质量(或摩尔)通量。对于稳态传递,我们可以得出

连续性方程为

另一种模拟质量守恒的方法是使用封闭表面  上积分形式的连续性方程:
上积分形式的连续性方程:

其中  是单位表面法线,或者更通俗地说,对于通量而言:
是单位表面法线,或者更通俗地说,对于通量而言:

这一关系表明,质量通量在封闭表面 上守恒,或者说平衡,也可以说 “从一侧进入控制体积的质量必须从另一侧出来”。
大致来说,稳态连续性方程表明,从一侧进入控制体积的任何通量都需要从另一侧出去。
加入时间导数项后,我们还可以计算随时间变化的速率。
请注意,除质量和浓度外,守恒方程还可用于许多其他不同的物理量,如电荷或热量的守恒。有关守恒方程的更多信息,请 点击此处。
对流和扩散通量
质量通量经常会有一个扩散项:

其中,  是扩散系数。
是扩散系数。
在这种情况下,连续性方程为

或者

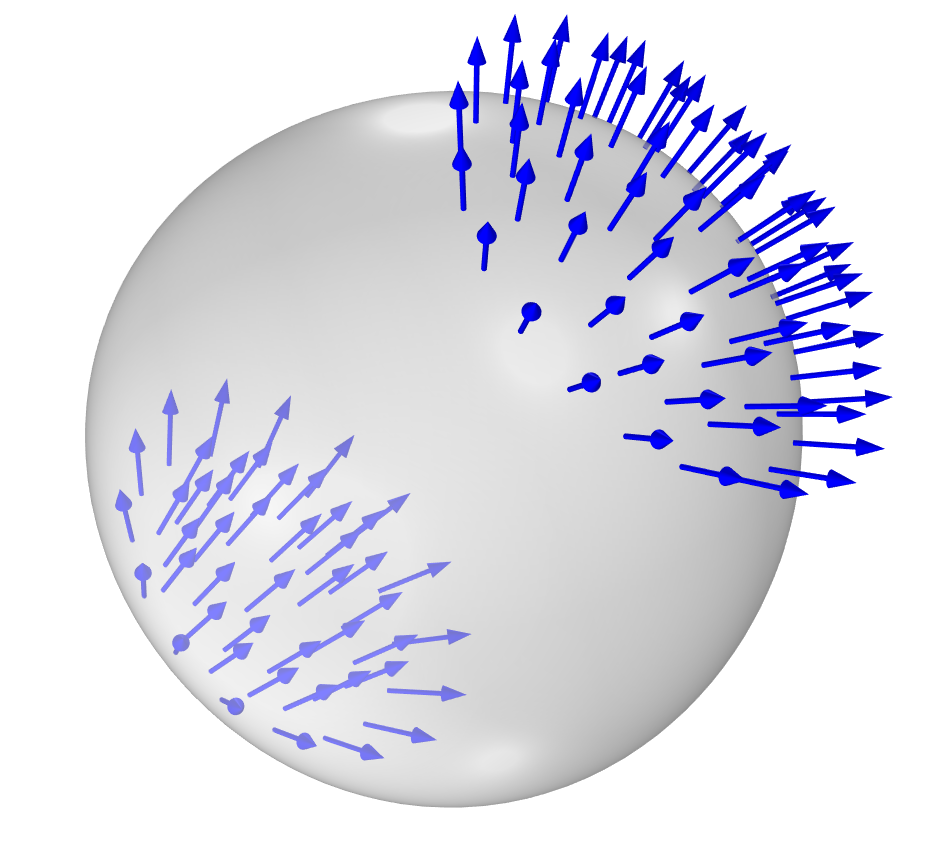
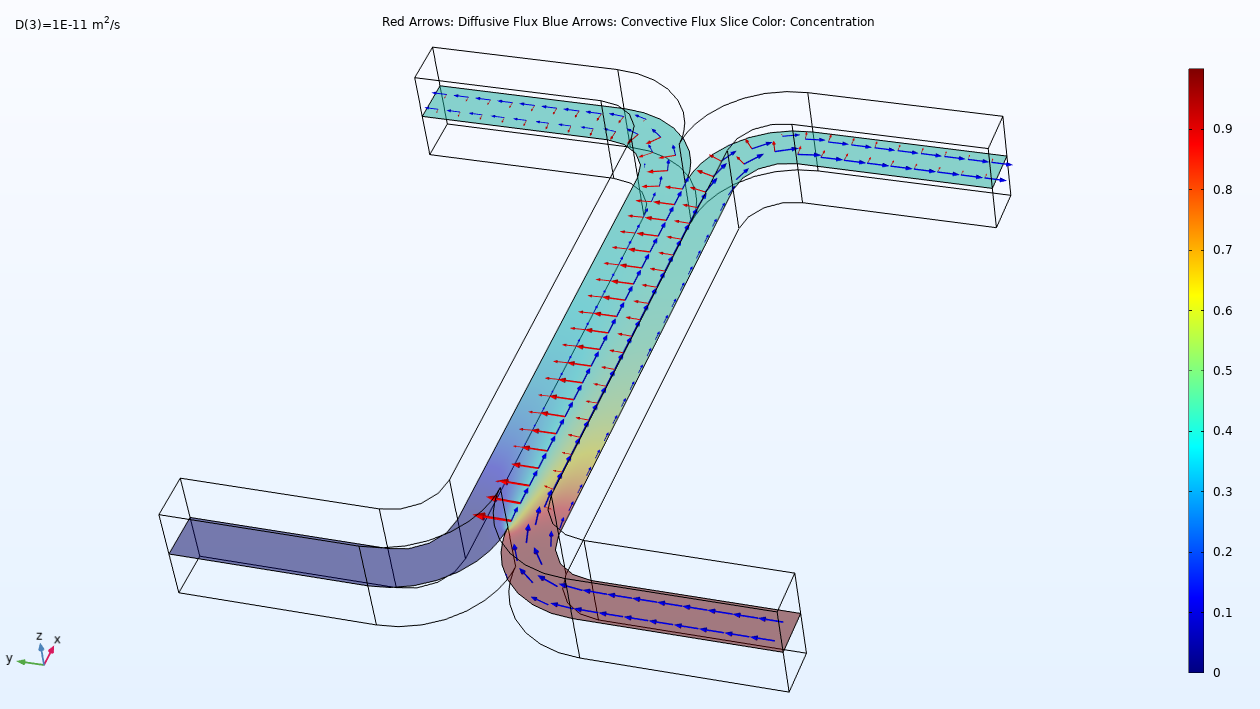 A microchannel mixer model in the rainbow color table with a slice through the middle.
A microchannel mixer model in the rainbow color table with a slice through the middle.微通道混合器案例模型 中的扩散通量(红色箭头)和对流通量(蓝色箭头),通道中间的彩色切面可以直观地看到物质的浓度。扩散通量从高浓度区域流向低浓度区域。在这个示例中,对流通量来自纳维-斯托克斯方程的解。
根据流体是否可压缩,可能存在两种不同的对流项。为了理解这一点,让我们来分析对流项的散度:

对于不可压缩流体,我们可以得出  ,因此:
,因此:

在系数形式偏微分方程中,  称为 守恒对流项,而
称为 守恒对流项,而  称为 非守恒对流项,或简称 对流项。
称为 非守恒对流项,或简称 对流项。
对流-扩散方程的系数形式偏微分方程
现在,让我们将下列项与以浓度变量 为因变量的系数形式偏微分方程的各项进行比较:

可以看到,对于连续性方程所描述的质量传递而言:


 或者
或者 



如果有一个化学反应项 ,那么

请注意,在流体可压缩的情况下,我们使用  ,如果已知流体不可压缩,则可以使用
,如果已知流体不可压缩,则可以使用  。请注意,我们需要从这两个系数中选择一个来表示对流。
。请注意,我们需要从这两个系数中选择一个来表示对流。
对于 系数形式偏微分方程 接口,有两个重要的边界条件。第一个是用于模拟边界通量的广义 纽曼 边界条件:
 ,
,
第二种是用于在边界上分配固定因变量值(在本例中为浓度)的 狄利克雷 边界条件:

可以看到,对于纽曼条件,从偏微分方程 “继承” 并指定了进入边界的质量通量。
守恒源项  提供了一种表示矢量源的方法,比标量源项
提供了一种表示矢量源的方法,比标量源项  ,更适合某些应用。例如,在使用 电流 接口时,电流守恒偏微分方程中的守恒源项对应于外部产生的电流
,更适合某些应用。例如,在使用 电流 接口时,电流守恒偏微分方程中的守恒源项对应于外部产生的电流  :
:

使用守恒源项的另一种情况是多孔介质流动仿真,其中重力以一种自然的方式作为外部源项  进入方程,得到达西定律偏微分方程:
进入方程,得到达西定律偏微分方程:

有时,守恒源项来自另一个因变量所代表的另一个物理方程。例如,在结构力学中,这个项可能与温度或湿度差异引起的体积应变相对应。
数值稳定性
从数值分析的角度来看,对流-扩散方程非常有趣,因为它的求解具有挑战性。如果对流比扩散多,就会出现数值不稳定性。为了解决这个问题,我们可以通过各种方法增加人工扩散项。最简单的方法是通过增加扩散系数的值来增加扩散;然而,这将增加计算域所有方向的扩散,也称为 各向同性人工扩散。这种方法的缺点是,虽然可以稳定方程,但对解的改变有点大,因此本质上我们求解的不是原始方程。由数值分析理论可知,增加各向异性人工扩散比增加各向同性人工扩散更好。沿速度场方向( 或  )增加的扩散称为 流线扩散,垂直于该速度方向增加的扩散称为 侧风扩散。由数值分析理论可知,流线扩散应多于侧风扩散。更多信息,请阅度博客文章 使用 COMSOL 理解稳定性方法。
)增加的扩散称为 流线扩散,垂直于该速度方向增加的扩散称为 侧风扩散。由数值分析理论可知,流线扩散应多于侧风扩散。更多信息,请阅度博客文章 使用 COMSOL 理解稳定性方法。
如果我们在 数学 接口下选择 稳定-对流扩散方程 接口,稳定性将以数学上一致的方式自动完成,如下图模型向导所示。此外,如果使用任意一种内置的物理场接口模拟传递(如 稀物质传递 接口)或流体流动,稳定性也会自动实现。当采用稳定性方法后,网格越精细,添加的人工扩散就越少。因此,随着网格的细化,解会逐渐趋近于原始方程的解。
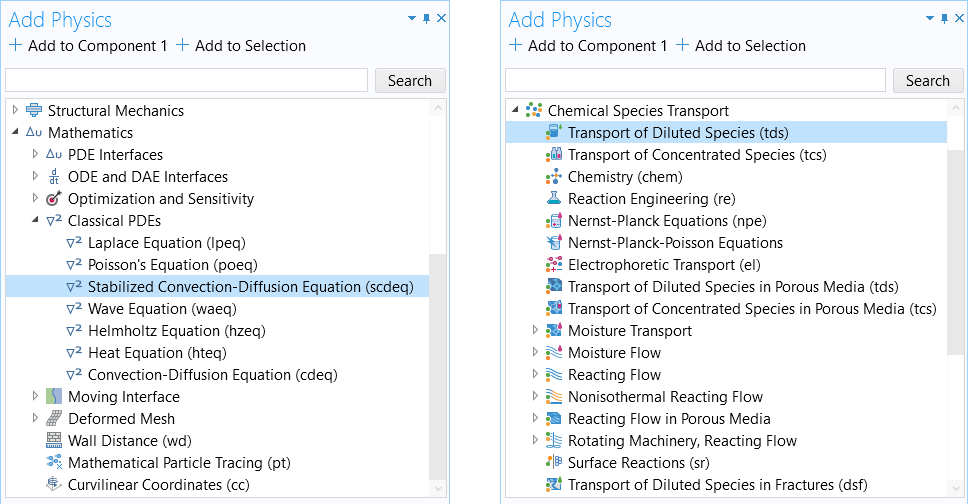 The Add Physics window in COMSOL Multiphysics with the Stabilized Convection-Diffusion Equation interface selected on the left and the Add Physics window with the Transport of Diluted Species interface selected on the right.
The Add Physics window in COMSOL Multiphysics with the Stabilized Convection-Diffusion Equation interface selected on the left and the Add Physics window with the Transport of Diluted Species interface selected on the right.稳定对流-扩散方程 接口(左)和 稀物质传递 接口(右)。
非线性方程:求解 Eikonal 方程
现在,让我们来看看如何求解非线性对流扩散偏微分方程。举例来说,我们求解计算边界距离的程函(Eikonal)方程时,可以通过使用不同版本的程函方程,采用更复杂、更稳健的方法来实现。如果我们愿意,可以使用偏微分方程接口来实现这个更稳健但也更复杂的方程。不过,壁距离 接口已经内置了这一功能,多个流体流动接口都使用该接口进行各种与距离相关的计算。有关该接口的更多信息,请参阅 COMSOL 博客 使用 壁距离 接口的技巧概述。
这里,让我们将问题简化一下。首先,假设在计算域内,可以用一个偏微分方程的解来表示到表面的距离  。事实证明,至少在相当光滑的边界附近,程函方程可以用来计算 到边界的距离:
。事实证明,至少在相当光滑的边界附近,程函方程可以用来计算 到边界的距离:

如果使用狄利克雷条件:

那么,在内部或外部的任何一点, 都将是到边界的最短距离。然而,只有当 “足够接近” 边界时,这个结论才是正确的。我们所说的 “足够接近” 取决于几何形状,当远离边界时,最终可能会到达一个点,在这个点上有此方程的多个解,这时这个策略就失效了。换句话说,由 的等值线或等值面形成的 “相位前沿”(对程函方程解的光学解释)发生了碰撞。
如何使 COMSOL Multiphysics® 软件中的一个 PDE 接口来计算程函方程呢?
有多种方法。其中一种方法是可以将梯度场  视为流体的速度场。如果我们取偏微分方程的平方,就可以得到:
视为流体的速度场。如果我们取偏微分方程的平方,就可以得到:

将这个方程与下面的 系数形式偏微分方程 进行比较:

其中

且

可以看到,在这种情况下,速度场来自因变量本身的梯度。方程中引用了变量自身,这意味着我们获得了一个非线性偏微分方程。使用 COMSOL Multiphysics® 中的 PDE 接口,可以计算很多非线性偏微分方程,虽然它们通常比线性偏微分方程更难求解,甚至许多非线性偏微分方程都没有解,并可能与合理的物理现象不符。程函方程也不例外,除非使用一些特殊的方法,否则很难求解,如前面使用内置 壁距离 接口时所述。
在这个例子中,我们将尝试使用通用偏微分方程模板求解程函方程,预计至少会遇到两个问题:
- 如之前了解的,对流方程通常很不稳定,除非我们添加一些扩散因素
- 当相位前沿碰撞时,可能没有唯一解
解决这些问题的最简单方法是加入一些人工各向同性扩散,这有时被称为 黏度法。我们可以通过指定一个扩散系数来做到这一点,它不能太大,以免破坏解的质量。但是,我们将不得不满足于只能得到程函方程的近似解,最终将求解的方程为:

我们可以使所需的扩散量与单元大小成正比。单元大小可使用一个内置变量 h 来获取,我们可以在扩散系数的表达式中使用它,其值越小,需要添加的扩散量就越少,结果也就越接近原始程函方程的解。
由各向同性扩散数值稳定理论(详细信息请参阅 理解稳定性方法)可知,为了避免振荡,我们需要的各向同性扩散量 是:

其中,  ,
,  是一个常数,取决于单元阶次和网格单元大小的变化速度。对于程函方程,我们可以得出
是一个常数,取决于单元阶次和网格单元大小的变化速度。对于程函方程,我们可以得出

这样关系就简化为

但是,对于一般的非线性方程和几何结构,很难证明这种策略是否有效,也很难确定应该增加多少人工扩散。这里使用的设置显示在下面的截图中,使用的值为  。 由于扩散系数 无单位,因此使用单位转换 1/m 将长度单位
。 由于扩散系数 无单位,因此使用单位转换 1/m 将长度单位 h 进行无量纲化。
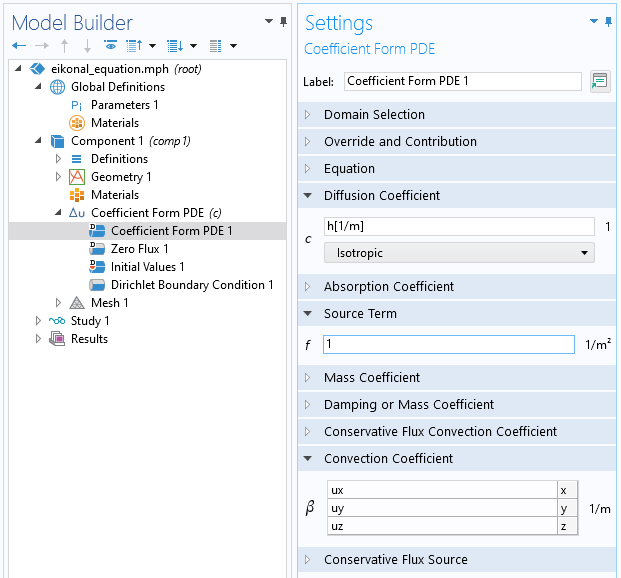
系数形式偏微分方程 的设置,用于直接求解程函方程。
狄利克雷边界条件 适用于某些边界,如下图所示。
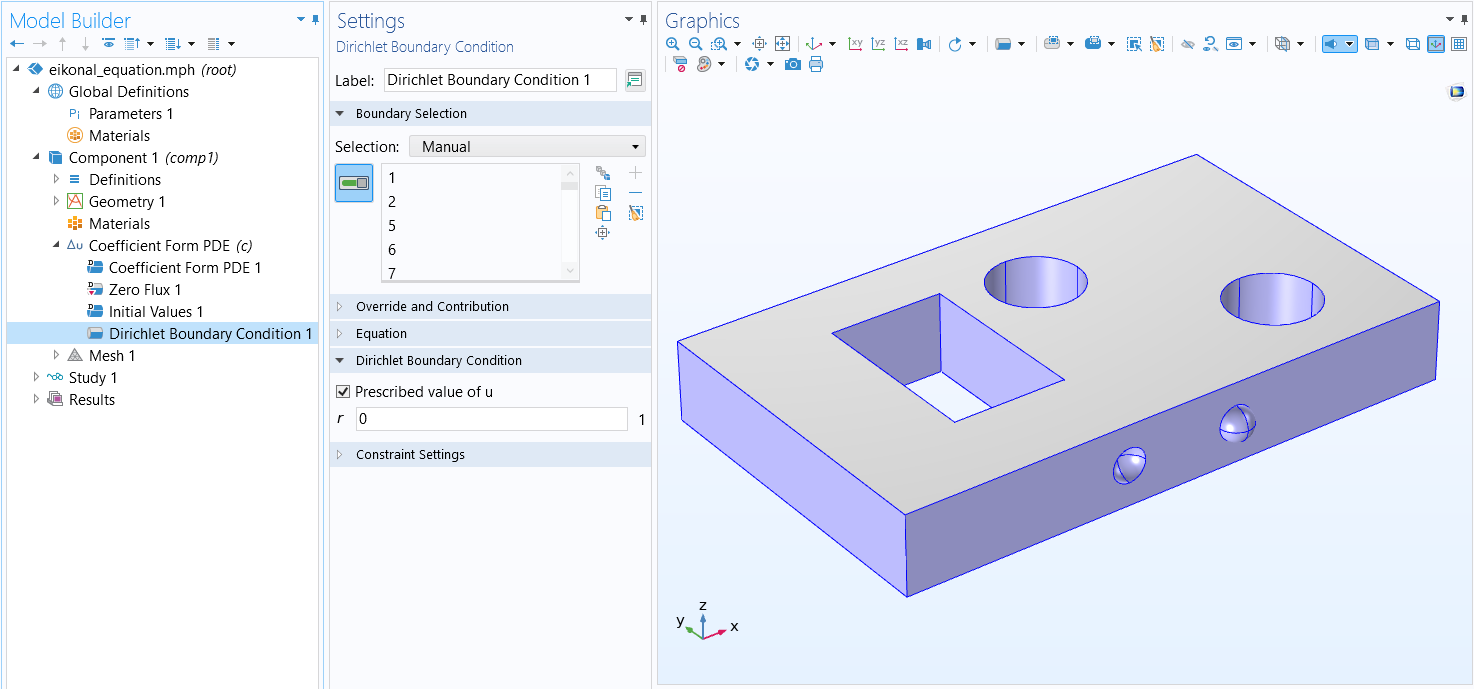 The COMSOL Multiphysics UI showing Dirichlet Boundary Condition 1 selected in the Model Builder, the corresponding Settings window, and a test geometry in the Graphics window.
利用 狄利克雷边界条件 求解程函方程
The COMSOL Multiphysics UI showing Dirichlet Boundary Condition 1 selected in the Model Builder, the corresponding Settings window, and a test geometry in the Graphics window.
利用 狄利克雷边界条件 求解程函方程
如下图所示,通过使用等值面或过滤器数据集,可以检索到与边界或壁一定距离相对应的相位前沿。(有关使用这些数据集的更多信息,请参阅 这篇博客)。 因此,这种方法可用于生成偏移面。等值面可以导出为 STL、PLY 或 3MF 文件,并用于不同仿真的几何导入。
 The COMSOL Multiphysics UI showing Isosurface 1 selected in the Model Builder, the corresponding Settings window, and a test geometry with a colored slice plot in the Graphics window.
在一个长约 50 个长度单位的测试几何结构(包括不同曲率对象)中的程函方程解。在这张结果图中,显示了距离 1.0 所生成的灰色偏移等值面。彩色切面图显示的是解。
The COMSOL Multiphysics UI showing Isosurface 1 selected in the Model Builder, the corresponding Settings window, and a test geometry with a colored slice plot in the Graphics window.
在一个长约 50 个长度单位的测试几何结构(包括不同曲率对象)中的程函方程解。在这张结果图中,显示了距离 1.0 所生成的灰色偏移等值面。彩色切面图显示的是解。
扩展学习
本文中相关的模型文件包含一个 MPH 文件,使用了 系数形式偏微分方程 求解程函方程。为了更快、更高效地求解,使用了带多网格预处理的 GMERS 迭代求解器。作为练习,这些结果可以与使用内置 壁距离 接口求解的结果进行比较,您将发现两者的结果非常一致。欢迎下载本文随附的模型文件,开始学习。
请提交与此页面相关的反馈,或点击此处联系技术支持。