技术资料
白皮书
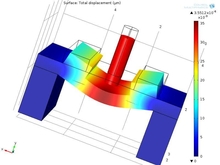
Development of MEMS-based Pressure Sensor for Underwater Applications
发布日期 2013
Blind cave fish are capable of sensing flows and movements of nearby objects even in dark and murky water conditions with the help of arrays of pressure-gradient sensors present on their bodies called lateral-lines. To emulate this functionality of lateral-lines for autonomous underwater vehicles, an array of polymer MEMS pressure sensors have been developed that can transduce underwater pressure variations generated by moving objects. The underwater object detection capability of the array is demonstrated. The array is capable of determining the velocity and distinguishing various distances of an underwater stimulus with high accuracy and repeatability. The design and simulation was performed using COMSOL Multiphysics®.
下载
- e_poster.pdf - 0.51MB
- e_paper.pdf - 0.66MB
- e_abstract.pdf - 0.03MB