多体动力学模块更新
COMSOL Multiphysics® 5.3a 版本为“多体动力学模块”的用户引入了一个新的物理场接口,用于集总机械系统建模,并新增了凸轮-从动件 关节类型。请阅读以下内容,进一步了解这些多体动力学特征。
集总机械系统物理场接口
借助新的集总机械系统 物理场接口,您可以通过图形格式以外的其他方式为离散机械系统建模,例如使用基于质量、阻尼、弹簧等。此接口尤其适用于在扬声器等机电系统中创建等效电路模型,它可以添加到零维到三维的任意维度的组件中,并且集总组件可以连接到任意维度的有限元模型。
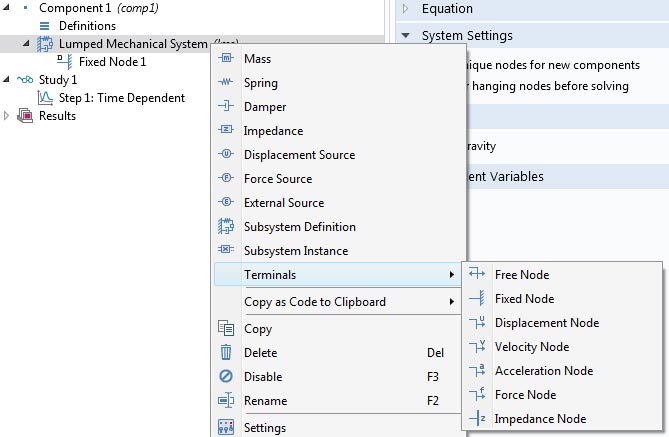
集总机械系统接口的内置特征。
凸轮-从动件关节
多体动力学 接口中新增的凸轮-从动件 关节用于模拟一个对象上的点跟随另一个对象的边界的情况。使用这一新功能为凸轮轴及类似机构建模时,您可以感受到前所未有的轻松和便捷。凸轮和从动件既可以是刚性,也可以是柔性。因此,您还可以使用这一特征得到两个零件之间的接触力。
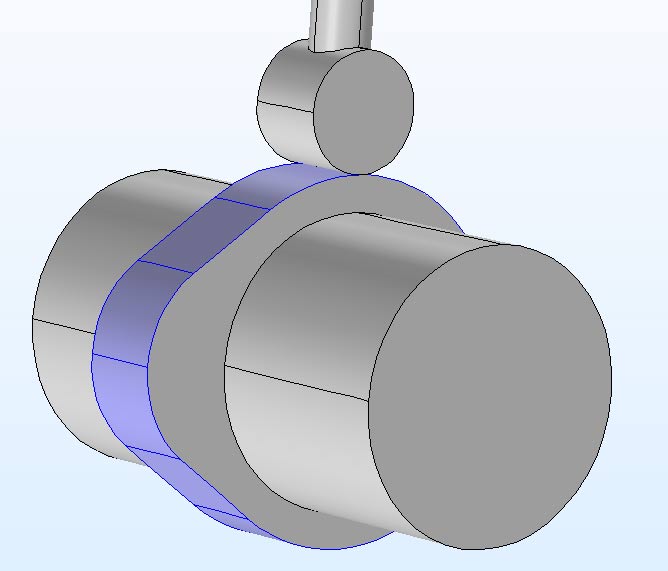
使用同名的新关节建模的凸轮-从动件机构。
默认绘图的功能改进
结构力学物理场接口中的默认绘图已更新,现在可以生成信息更丰富的可视化效果。“案例库”教程也进行了相应更新。主要更改如下所示:
- von Mises 应力图的颜色表为 RainbowLight
- 特征频率和线性屈曲研究的振型图颜色表为 AuroraBorealis
- 振型图已去除图例,以突出说明模式的振幅没有物理意义
- 梁 和桁架 接口中截面力绘图的颜色表为 Wave,具有对称的颜色范围
- 例如,借此可以立即区分拉伸和压缩
- 在接触分析中,以线图(二维)或云图(三维)的形式添加了接触压力图
- “应力线性化”的默认绘图现已在图表中加入图例
- 由壳 接口生成的默认“未变形几何”绘图现在新增了多种颜色
- 在使用塑性或蠕变等材料模型时,相关应变物理量的云图(如有效塑性应变)叠加在应力图上
- 适用于“非线性结构材料模块”和“岩土力学模块”
- 在疲劳 接口中,Traffic 颜色表用于预测的失效周期和使用因子
- 适用于“疲劳模块”
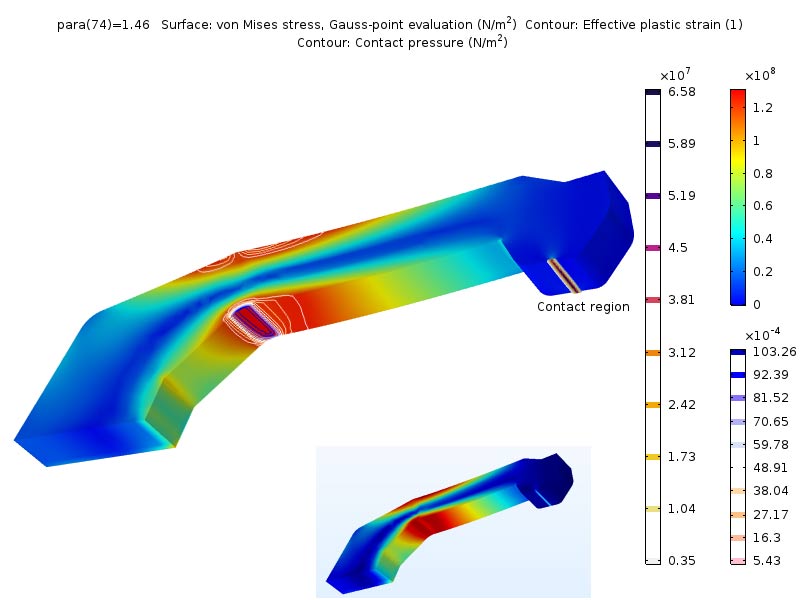
在本例中您可以看到,应力图中的颜色较亮(RainbowLight 颜色表),默认情况下已添加塑性应变等值线和接触压力等值线。为了进行比较,同时显示了 COMSOL Multiphysics® 5.3 版本中同一模型的默认绘图。
新增教学案例:基于径向凸轮的阀门开启机构建模
在本教学案例中,您可以研究具有摇臂和径向凸轮的弹簧式阀门开启机构。所有系统组件均作为刚体建模,并通过棱柱关节、铰链关节和槽关节以及新的凸轮-从动件关节进行连接。该模型可以对各种弹簧刚度值执行瞬态分析,输出结果包括随动速度、随动加速度、凸轮-从动件连接力以及所需的扭矩等。
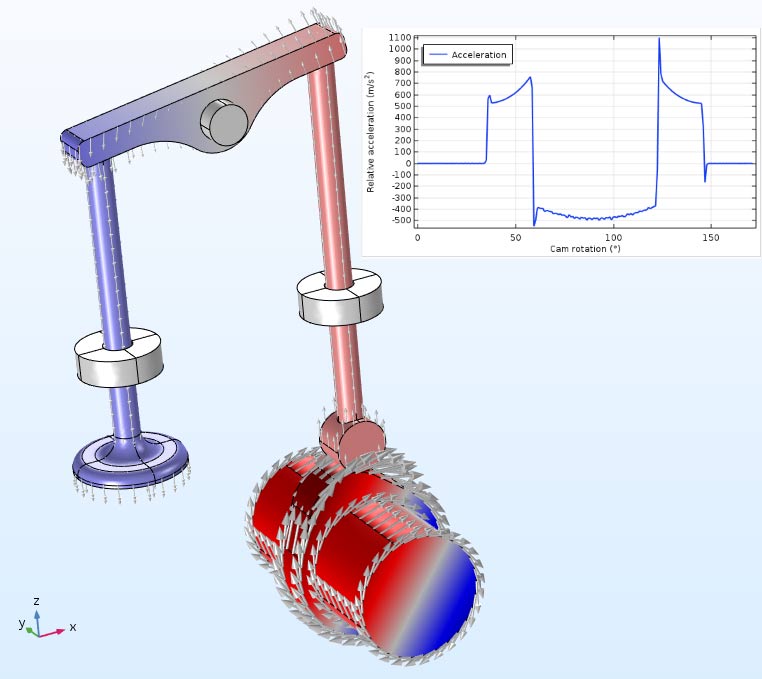
表面图显示垂直速度,箭头显示组件中的速度场。图中显示从动件的加速度历史记录。
案例库路径:
Multibody_Dynamics_Module/Tutorials/radial_cam_follower
新增教学案例:车辆悬挂系统集总模型
在本案例中,我们通过集总模型来分析具有 11 个自由度的车辆悬挂系统。使用集总机械系统 接口的质量、弹簧 和阻尼器 节点为车轮(包括悬挂系统)以及座椅和乘客建模。并使用多体动力学 接口将具有 3 个自由度的车身作为刚体建模。通过执行瞬态分析,计算给定路面不平度时车辆的运动及座椅振动级别。
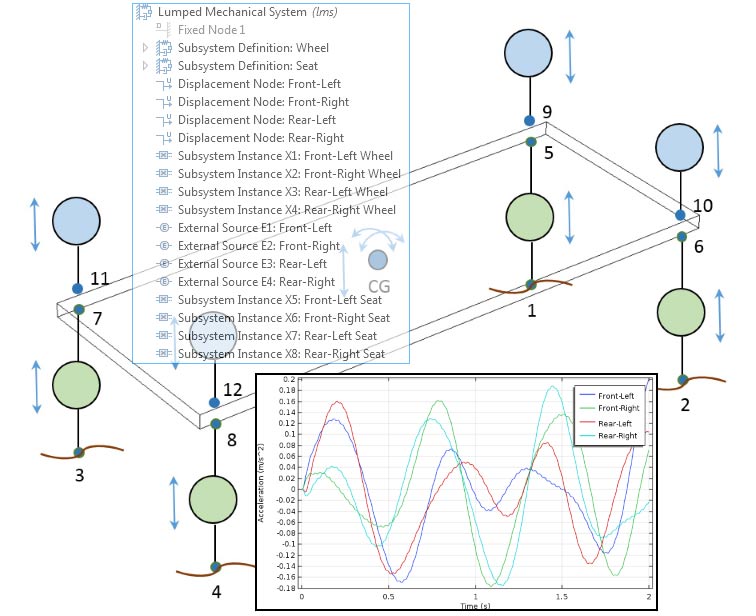
这一车身概念模型显示车轮和座椅(背景图),通过 集总机械系统接口(透明图)中的相应节点建模,用于计算四个座椅的加速度(前景图)。
案例库路径:
Multibody_Dynamics_Module/Automotive_and_Aerospace/lumped_vehicle_suspension_system
新增教学案例:人体集总模型
此模型可用于分析具有 5 个自由度的人体集总模型。您可以使用集总机械系统 接口的质量、弹簧 和阻尼器 节点为人体和鞋-地面界面建模。首先,执行特征频率研究来确定系统的固有频率。然后,执行频率响应分析,计算指定基础激励的系统响应。
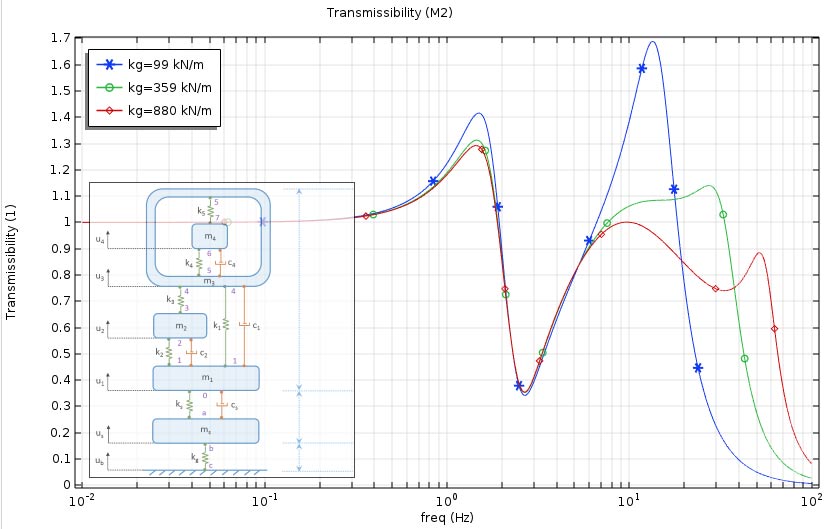
三个不同土壤刚度值对应的地面到下肢的振动传递率。
案例库路径:
Multibody_Dynamics_Module/Biomechanics/lumped_human_body
更新教学案例:使用集总机械系统的集总式扬声器驱动器
这是一个动圈式扬声器模型,通过集总参数模拟来表示电子和机械扬声器分量的特性,其中使用 Thiele-Small 参数(小信号参数)作为集总模型的输入。在此模型中,移动质量、悬挂系统的柔性和机械损耗等机械扬声器分量通过集总机械系统 接口进行建模。
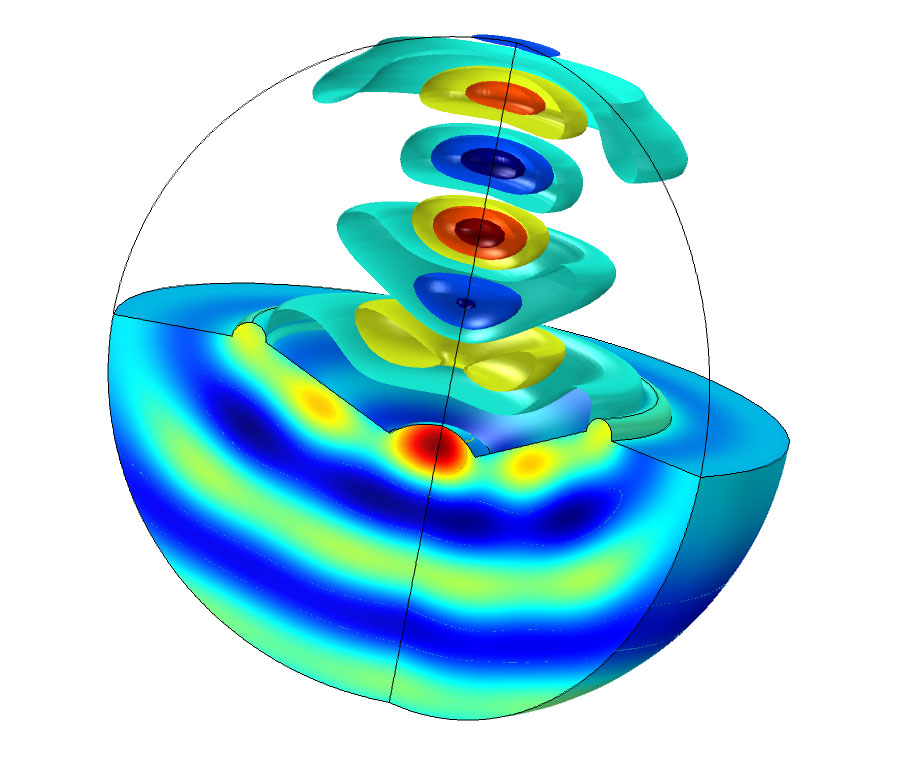
压力场绘制为等值面(扬声器纸盆上方)及表面图(扬声器纸盆下方)。
案例库路径:
Acoustics_Module/Electroacoustic_Transducers/lumped_loudspeaker_driver_mechanical