使用有限元分析(FEA)计算扬声器驱动器的大信号参数
当音圈偏离其平衡位置的位移较小且问题仍处于线性状态时,课程第 6 部分中得出的小信号参数足以描述驱动器在低频极限下的行为。然而,在较高的电压激励下,音圈位移变大时,线性假设就不再有效,此时需要考虑集总参数与线圈位移的关系。本部分课程,我们将讨论当音圈受到较大位移时,如何估计扬声器驱动器的大信号参数。
非线性力顺计算
在大变形情况下,为了获得非线性力顺  与线圈位移
与线圈位移  ,我们可以采用与小变形情况下线性力顺分析相同的物理设置和研究步骤(见第 6 部分),并做出以下两点改动:
,我们可以采用与小变形情况下线性力顺分析相同的物理设置和研究步骤(见第 6 部分),并做出以下两点改动:
- 如下图所示,在 稳态 研究步骤的 研究设置 栏选择 包含几何非线性 复选框,启用几何非线性分析进行结构分析。此操作将强制使用大应变公式,这是结构发生大变形时的必要选项。
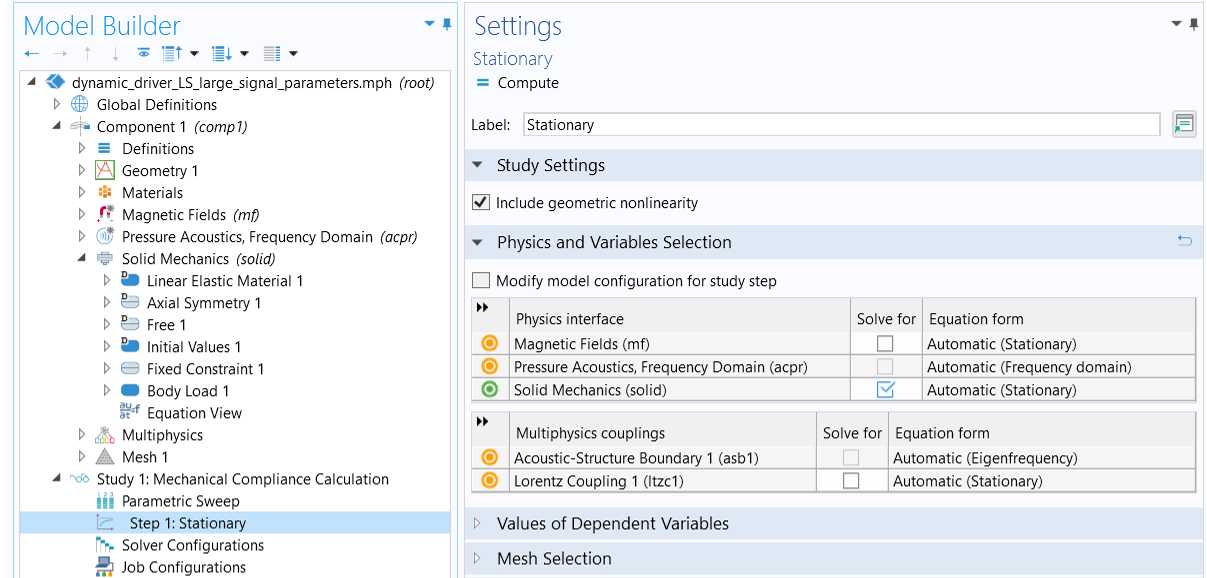 A Stationary study showing the Include geometric nonlinearity checkbox selected and Solid Mechanics as the selected physics.
对于大变形,必须进行几何非线性分析。
A Stationary study showing the Include geometric nonlinearity checkbox selected and Solid Mechanics as the selected physics.
对于大变形,必须进行几何非线性分析。
- 在 参数化扫描 设置的 研究设置 栏,使用范围函数来更改施加的体载荷值,如下图所示。对于小变形或线性分析,两个点就足以计算顺性。但是,对于大变形,顺性将在不同位移时发生变化,因此需要研究涵盖从零到最大偏移的线圈位移力的全部范围。这里使用了两个范围函数:range(0,2,20) 涵盖线圈向上移动的所有情况,range(0,-2,-20) 涵盖线圈向下移动的所有情况。
 The displacement range is defined in a Parametric Sweep window associated with a Mechanical Compliance study.
在整个位移范围内进行结构分析,以获得非线性力顺曲线。
The displacement range is defined in a Parametric Sweep window associated with a Mechanical Compliance study.
在整个位移范围内进行结构分析,以获得非线性力顺曲线。
完成研究求解后,我们可以对音圈域中的一个点进行点计算,得到线圈位移与外力的关系,如下图所示。
 A Point Evaluation Settings window showing expressions for displacement and force and a table of values.
在音圈域中的某一点计算位移与力关系的数据,并保存到表格中。
A Point Evaluation Settings window showing expressions for displacement and force and a table of values.
在音圈域中的某一点计算位移与力关系的数据,并保存到表格中。
通过计算位移相对于外力的导数 d(w)/d(Fcom),可以计算顺性。由于不能简单地对表格中的离散点进行微分,我们可以将表格转化为平滑函数,以便在 COMSOL Multiphysics® 中进行微分运算。为此,我们需要以下步骤:
- 使用保存在 计算组 1 结果表 中的位移-力的数据生成一个插值函数,如下图所示。这里的函数名为 Force,插值 方法选择了 三次样条 选项,外推 选择了 线性。同样重要的是,要确保函数和变元的单位定义正确。
 An interpolation feature uses displacement-force data from a table of values and plots the interpolation.
表格中保存的位移-力数据可直接用于定义插值函数。
An interpolation feature uses displacement-force data from a table of values and plots the interpolation.
表格中保存的位移-力数据可直接用于定义插值函数。
- 定义一个 一维栅格 数据集。使用 研究 1 的解作为源数据,并将参数 x 的范围设置为 -5.77 mm(约为最大向下位移)至 6.11 mm(约为最大向上位移),使其涵盖研究中发现的线圈位移带。然后就可以将参数 x 用作 Force 函数的变元。
 A Grid 1D dataset is configured with the displacement parameter of interest and associated bounds.
一维栅格 数据集定义的参数涵盖了研究中发现的位移范围。
A Grid 1D dataset is configured with the displacement parameter of interest and associated bounds.
一维栅格 数据集定义的参数涵盖了研究中发现的位移范围。
- 转到 研究 1 节点,单击 更新解,使 Force 函数可用于结果计算。
然后就可以计算与位移相关的刚度  和顺性 , 如下图所示。使用 一维栅格 数据集作为源数据,d(Force(x),x) 折线图给出了刚度(上图),其倒数给出了顺性(下图)。顺性图使用了 1000 的系数,因为采用 mm/N 为单位。
和顺性 , 如下图所示。使用 一维栅格 数据集作为源数据,d(Force(x),x) 折线图给出了刚度(上图),其倒数给出了顺性(下图)。顺性图使用了 1000 的系数,因为采用 mm/N 为单位。
 Two Line Graph features are used to plot the stiffness and compliance vs. the displacement of the coil.
Two Line Graph features are used to plot the stiffness and compliance vs. the displacement of the coil.刚度(上)和顺性(下)与线圈位移的函数关系。
非线性电气参数计算
为了获得作为音圈位移函数的电气参数,我们可以对扬声器驱动器的电磁元件进行准静态分析。也就是说,我们将移动音圈,运行研究,并计算每个音圈位移时的电气参数。需要对几何结构进行一些修改,以便每次运行时都能移动音圈。
如下图所示,可在新组件(组件 2)中构建用于此分析的新几何结构,其中仅包含音圈、磁铁、软铁和空气域。移动 操作用于在 Z 方向移动线圈,与原始位置的位移由名为 zoff 的参数控制。
 A Move geometry feature has the cross section of the coil as an input shown in blue.
在新的几何结构中移动线圈域,以进行准静态分析。
A Move geometry feature has the cross section of the coil as an input shown in blue.
在新的几何结构中移动线圈域,以进行准静态分析。
在此分析中,我们只需要 磁场 接口,物理场设置与组件 1 相同。为了提取  作为线圈位移的函数,运行磁场 稳态 研究,并使用 参数化扫描 改变音圈位置,如下图所示。本文随附模型文件中的研究 2 对此进行了求解。
作为线圈位移的函数,运行磁场 稳态 研究,并使用 参数化扫描 改变音圈位置,如下图所示。本文随附模型文件中的研究 2 对此进行了求解。
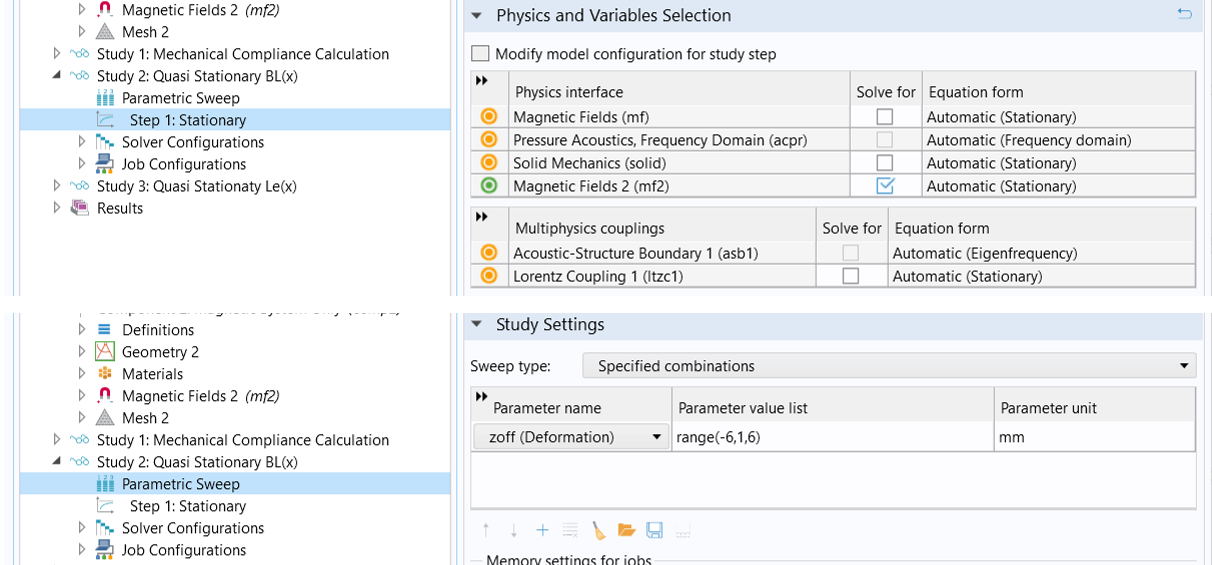 The study settings are shown via the Stationary step and Parametric Sweep Settings windows.
作为线圈位移函数的力因子(BL)提取研究设置。
The study settings are shown via the Stationary step and Parametric Sweep Settings windows.
作为线圈位移函数的力因子(BL)提取研究设置。
与课程第 6 部分中使用的方法类似,我们可以通过计算每个位移的音圈域的  项的面平均值来计算
项的面平均值来计算  。 无需使用 派生值 的 全局计算 节点,也不需要将结果保存到表格中,而是在 组件 2 > 定义 中添加线圈域的平均算子,如下图所示。
。 无需使用 派生值 的 全局计算 节点,也不需要将结果保存到表格中,而是在 组件 2 > 定义 中添加线圈域的平均算子,如下图所示。
 The configuration for an Average feature used as part of the force factor calculation is shown.
在音圈域上定义了一个平均算子用于计算力因子(BL)。
The configuration for an Average feature used as part of the force factor calculation is shown.
在音圈域上定义了一个平均算子用于计算力因子(BL)。
对 aveop2(-mf2.Br*N0*2*pi*r) 进行计算,可得到  值,其结果如下图所示。
值,其结果如下图所示。
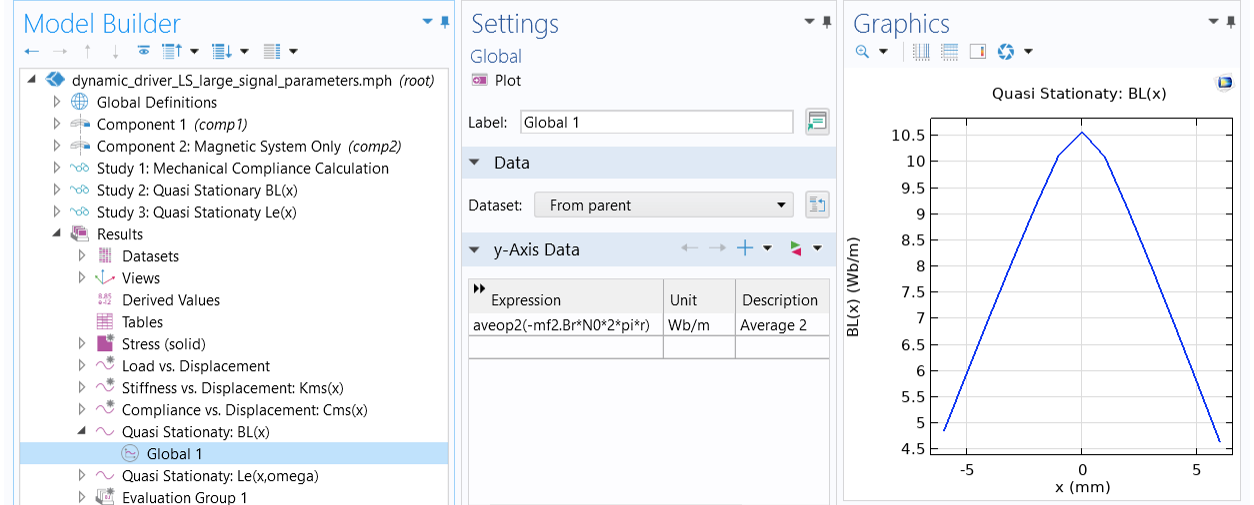 A global feature using the values from Average 2 as part of the BL calculation and plotting the result.
力因子(BL)与线圈位移的函数关系。
A global feature using the values from Average 2 as part of the BL calculation and plotting the result.
力因子(BL)与线圈位移的函数关系。
线圈电感的提取需要进行 小信号分析,频域 研究。同样,其中包括两个步骤:稳态 步骤,计算永磁体产生的静态磁场;频域扰动 步骤,用谐波交流电压激励音圈,求解扰动磁场和电磁回路中感应的额外电流。这些步骤在 研究 3 中求解,如下图所示。这里同样使用了 参数化扫描 来改变音圈的位置。
 The study settings in the Stationary, Frequency Domain Perturbation, and Parametric Sweep Settings windows for extracting coil inductance vs. coil displacement.
提取线圈电感(Le)作为音圈位移函数的研究设置。
The study settings in the Stationary, Frequency Domain Perturbation, and Parametric Sweep Settings windows for extracting coil inductance vs. coil displacement.
提取线圈电感(Le)作为音圈位移函数的研究设置。
音圈电感由内部计算得出,并保存在名为 mf2.LCoil_1 的变量,通常是音圈位移和频率的函数,其幅值图如下所示。
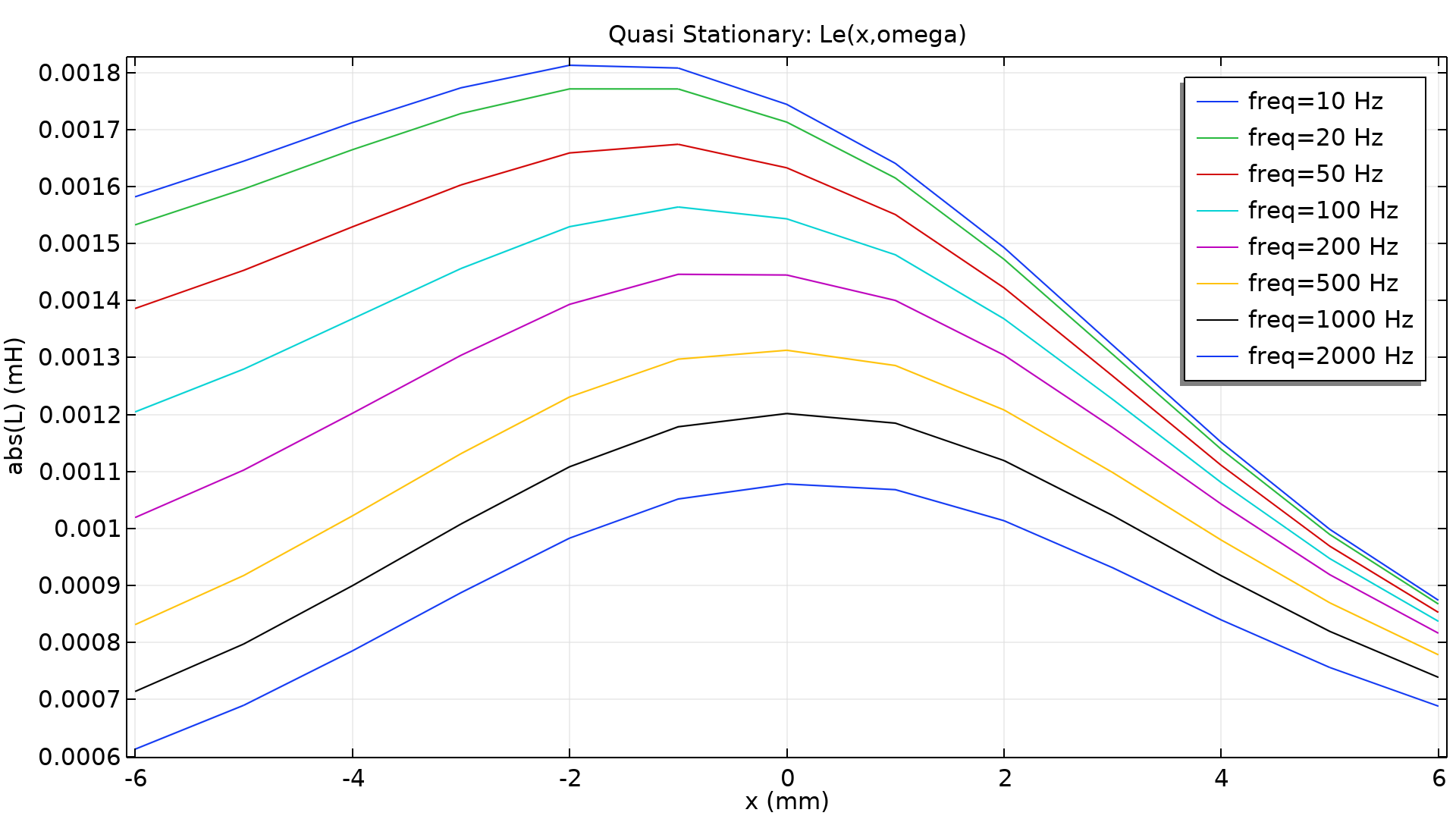
音圈电感(Le)是音圈位移和驱动频率的函数。
请提交与此页面相关的反馈,或点击此处联系技术支持。