附录 B:用于三维仿真分析的迭代求解器
在 COMSOL 中求解三维模型时,默认生成的求解器的设置包含建议使用的预定义迭代求解器。根据仿真要求,可能需要使用和/或调整迭代求解器以高效地求解模型。
自动生成迭代求解器的背景
如下图所示,迭代求解器使用了混合预处理器。多重网格预条件器是一种快速且节省内存的高效迭代方法,用于求解声压和磁矢量势,默认使用两个直接预条件器:一个用于求解线圈电流,另一个用于求解固体位移场。直接预条件器使用直接求解器作为预条件器,这样就可以使用直接求解器求解其中的因变量。混合方法允许对多物理场模型中自由度要求较低的较小场使用直接求解器,对其他较大的物理问题则结合使用多重网格迭代求解器。这一建议确保了声学、结构和电磁耦合问题的高效求解。
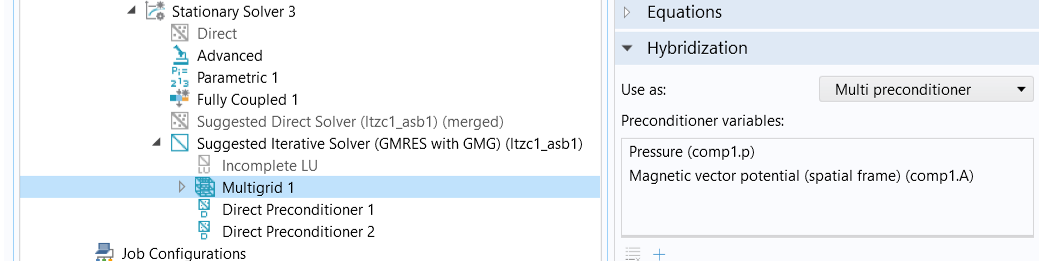 A close-up of the Model Builder with Multigrid selected and the Settings window with Multi preconditioner selected.
A close-up of the Model Builder with Multigrid selected and the Settings window with Multi preconditioner selected.
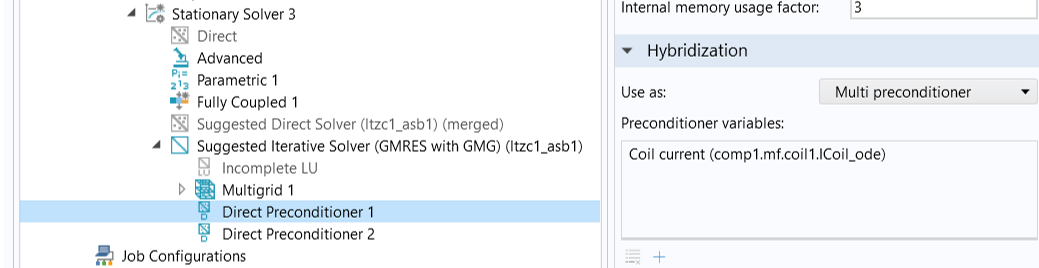 A close-up of the Model Builder with Direct Preconditioner 1 selected and the Settings window with Multi preconditioner selected.
A close-up of the Model Builder with Direct Preconditioner 1 selected and the Settings window with Multi preconditioner selected.
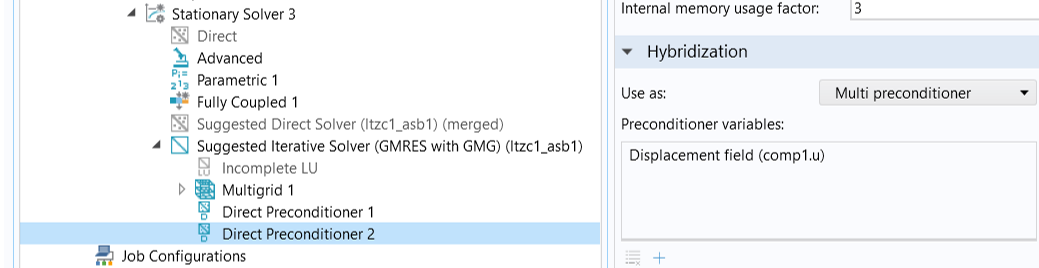 A close-up of the Model Builder with Direct Preconditioner 2 selected and the Settings window with Multi preconditioner selected.
A close-up of the Model Builder with Direct Preconditioner 2 selected and the Settings window with Multi preconditioner selected.
为了高效解决耦合的多物理场问题,建议的迭代求解器(GMRES 和 GMG)使用了三种混合预处理器:多重网格(上)、直接预处理器 1(中)和 直接预处理器 2(下)。
其他求解器和收敛考虑
在求解用标量和矢量电势表述的麦克斯韦方程时,除非指定参考水平,否则电势无法唯一确定。因此,在某些情况下,建议在求解磁场时使用规范固定来提高数值稳定性。这两篇博客 理论介绍——什么是规范固定 和 如何在 COMSOL Multiphysics® 中使用规范固定?? 对此进行了详细说明。在 磁场 接口,有一个名为 A场规范固定 的域功能,可用于确保求解磁矢量势  的方程具有唯一且数值稳定的解,其中通过在系统中添加额外的磁势变量
的方程具有唯一且数值稳定的解,其中通过在系统中添加额外的磁势变量  及其相关的守恒方程来强制执行规范
及其相关的守恒方程来强制执行规范  。当迭代求解器难以收敛时,可将此功能应用于 磁场 接口中求解的所有域,如下图所示。
。当迭代求解器难以收敛时,可将此功能应用于 磁场 接口中求解的所有域,如下图所示。
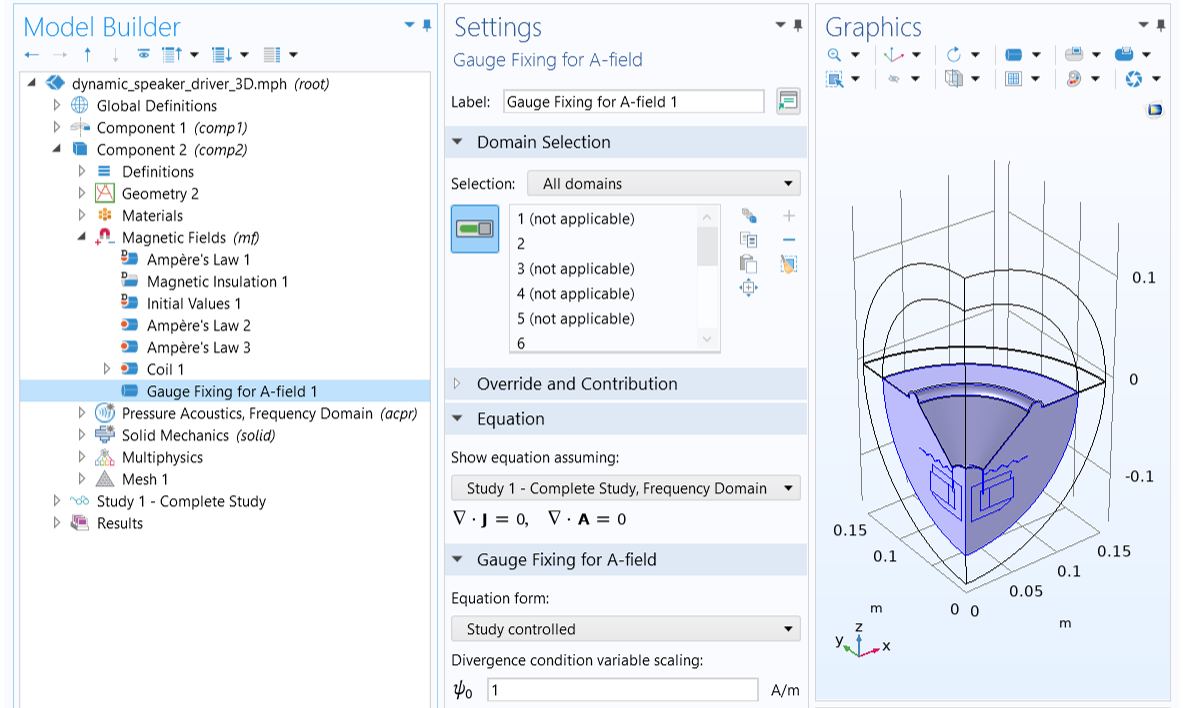 在磁场模型中应用 A 场规范固定,以提升迭代求解器的收敛性。
在磁场模型中应用 A 场规范固定,以提升迭代求解器的收敛性。
对于使用 A场规范固定 的模型,还有一个建议的迭代求解器。如果你添加了规范固定,请记住将求解器重置为默认设置,以便获得自动生成的迭代求解器序列。
通常来说,规范固定会提高模型的稳健性,所需的线性迭代次数也更少。不过,除非必要,不建议使用规范固定,因为它会增加未知数总数,需要更多内存和更长的迭代求解时间。本文中的模型示例没有使用规范固定,因为它无需规范固定即可求解,并且求解速度更快,尽管这需要更多的线性迭代。
请提交与此页面相关的反馈,或点击此处联系技术支持。