- COMSOL News 2025
- COMSOL News Special Edition: Food Industry
- COMSOL News 2023
- COMSOL News 2022
- COMSOL News 2021
训练无人水下航行器,实现水底结构可视化
美国南密西西比大学通过开发和使用仿真 App,将机器学习模型融入无人水下和水面航行器的训练中。作者 Joseph Carew
2025 年 4 月
在密西西比海岸一个风平浪静的日子里,一艘小型水面舰艇在一个测试区域有序巡航,这个低磁信号传感器平台正在努力扫描海底寻找铁磁目标。这些扫描只是南密西西比大学(University of Southern Mississippi,USM)的 Roger F. Wicker 海洋企业中心开展的一个宏大项目的一部分,通过将建模仿真和机器学习相结合,USM 的研究人员正在为智能无人水下航行器的研发奠定基础,使其能够自主、准确地揭示海浪之下的情况。
模拟海底铁磁结构
大多数港口底部(和海底)都存在铁磁性物质,例如,人造结构和残骸,甚至是未爆炸的弹药。为了防止港口交通工具撞上这些危险物品,导航图需要准确地反映它们的位置。使用配备先进传感器设备的无人水下航行器,是扫描这些水下磁异常现象的一种比较有效的方法。然而,这些航行器也面临着一定的挑战,由于其造价昂贵、物理扫描复杂,以及平台噪声与环境噪声(如环境杂波与风浪干扰)的影响,这些设备并不总能准确地描绘出图像。更棘手的是,某些海底特征的非唯一性会导致对不同水下构造的扫描结果看起来很相似。USM 的一个团队正在研究如何应对这些挑战,为更好地基于无人水下航行器的传感和测绘铺平道路。
“我们对新兴的无人系统平台,包括水下和水面平台(图1)以及先进的传感器集成,进行了大量数据驱动的测试和评估,” USM 的研究员 Jason McKenna 博士介绍,“特别是,我们正在研究将磁传感器直接集成到无人水下航行器上,其工作过程中存在大量环境和平台噪声。” 研究团队利用仿真模拟(通过实证数据验证)、仿真 App 和机器学习技术,开发了一种可集成到无人水下航行器中的计算系统,用于自动目标识别,并提升航行器记录的磁场和最终重力场数据的准确性。

海底漫步
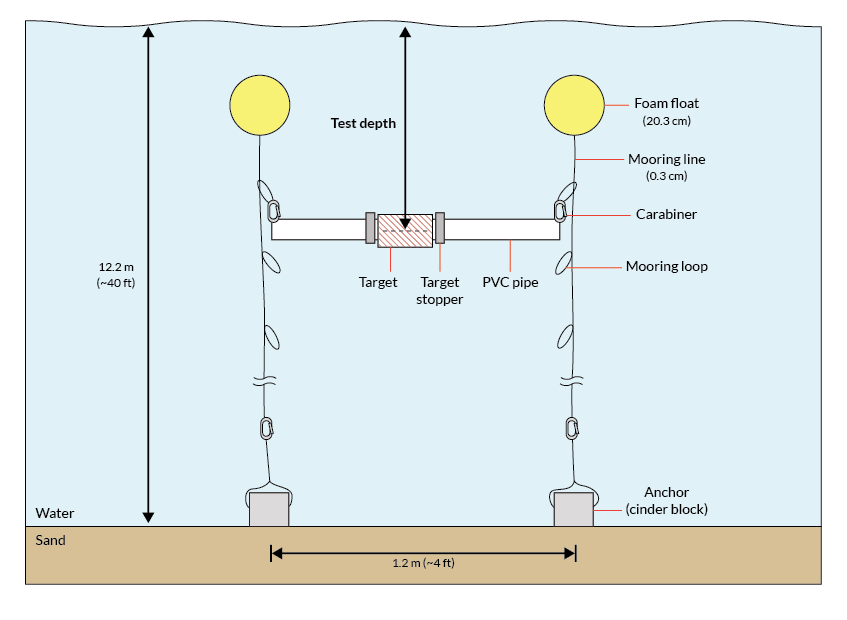
在构建模型之前,团队必须获取用于对模型进行基准测试和验证的真实数据。为此,研究团队前往一个有已知目标的受控海洋环境,并使用高精度重力和磁力传感器进行了勘测。物理实验在墨西哥湾附近进行,团队使用绞盘系统牵引传感器平台在两点间 70 m 的范围内移动。在海面下,传感器平台分别扫描两个不同的目标:一个长 20.3 cm、直径 2.5 cm、垂直放置的圆柱形磁铁(图 2),一个长 30.5 cm、直径 11.4 cm、水平放置的钢管(图 3)。研究团队在 1 m、3 m 和 5 m 深处分别放置了装有磁铁或钢管的容器,并对每个目标重复进行多次试验。
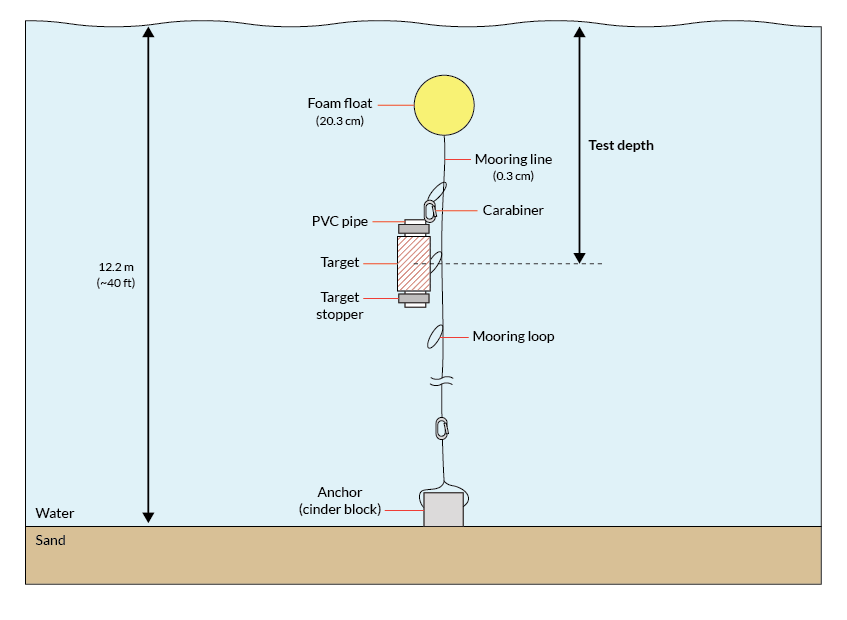
"我们这里所讨论的物理现象遵循 r 的三次方衰减规律,因此磁场衰减得非常快。” McKenna解释道,"如果你想观测任何东西,必须靠近目标。这就是为什么当你进行考古勘测时,通常需拖曳磁力计远离船舶噪声源,并在距海底数米高度滑过。"
McKenna解释说,他的团队特意选用了比实际场景更强的磁信号。
“实际数据从不会如此理想化,但这个实验证明,只要采用正确的方法、准确的物理原理和恰当的边界条件,就能初步模拟出单个目标物可能呈现的多数特征。" 他进一步补充道,"当我们将所有目标特征叠加,再引入平台噪声后,就能生成高度复杂的结果。"
开发用于生成合成数据的模型
物理实验阶段完成后, USM 团队需要采取几个步骤,以获得改进无人水下航行器性能所需的算法。这一过程包括构建可能的势场模型并进行不确定性量化分析;基于可生成数据的验证模型开发仿真 App; 使用生成的数据训练机器学习模型,以帮助无人水下航行器探测感兴趣的物体。
势场模型
McKenna 团队使用 COMSOL Multiphysics® 仿真软件及其附加产品 AC/DC 模块建立了势场模型,这些模型可用于表征磁场、引力场或热场与物体之间的相互作用,对于量化海底及海底物体的特征至关重要。
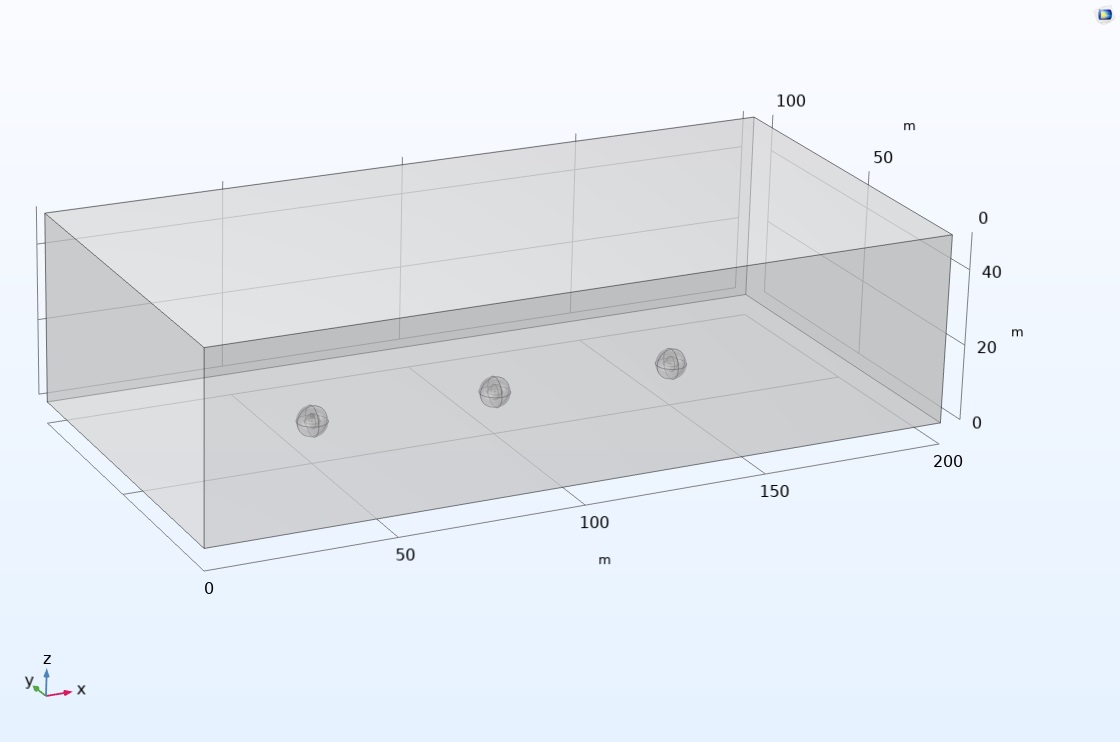
团队首先定义了目标对象的物理属性,并利用软件的 “磁场,无电流” 接口生成了一系列目标,以创建一个测试床。然后,他们在模拟空间引入了低(30.5 cm)、中(70 cm)和高(91.4 cm)磁性目标的空间配置(图 4),并计算这些目标与周围介质的相互作用。最后,他们模拟各种不同的无人水下航行器,记录重力和磁力异常(即目标),以生成一个捕捉了不同场景下势场细微变化差别的庞大数据集。为了给无人水下航行器模拟提供信息,研究团队使用了不确定性量化分析。
通过不确定性量化确定变量范围
为了研究不确定性在模拟无人水下航行器运行中的作用,并填补在实验中无法复现的参数空白,研究团队将不确定量化研究纳入了工作流程。具体来说,McKenna 使用 COMSOL Multiphysics 的另一个附加产品不确定性量化模块进行了筛选和敏感性分析。该模块作为软件的一个通用接口,可表征不确定性、传播模型中输入数据不确定性,以及对关注的输出量进行统计分析。
"模型的不确定性量化相当直观," McKenna 说,"我们想做一个筛选分析,类似于已做过的主分量分析。这是一种非常巧妙的方法,可以梳理出大量变量之间的依赖关系。“
McKenna 和他的团队能够确定他们希望通过扫描测量的铁磁结构或装置的预期参数范围,然后根据长度、壁厚和磁感应强度对目标进行参数化,并引入地球磁场的影响(这是无人水下航行器扫描金属物体时产生特征信号的主要原因)。通过洞悉这些参数的可行范围,可以轻松地重新校准和求解势场模型,复现各种无人水下航行器的运行情况,而通常情况下,在水面上运行这些操作需要花费数天的时间,并且计算成本高昂。
通过将磁场的磁纬度、经度和强度在 ±x% 的范围内变化,研究团队能够测量出这些变化的影响。"你可以做这样的敏感性分析,也可以使用不确定性量化找到这些值的范围,并获得一些认知,确定测量结果是否符合你的预期。" McKenna 介绍道,"我们在几分钟到一小时内就能为机器学习算法建立一个丰富而强大的训练集。"
从验证模型到机器学习训练 App
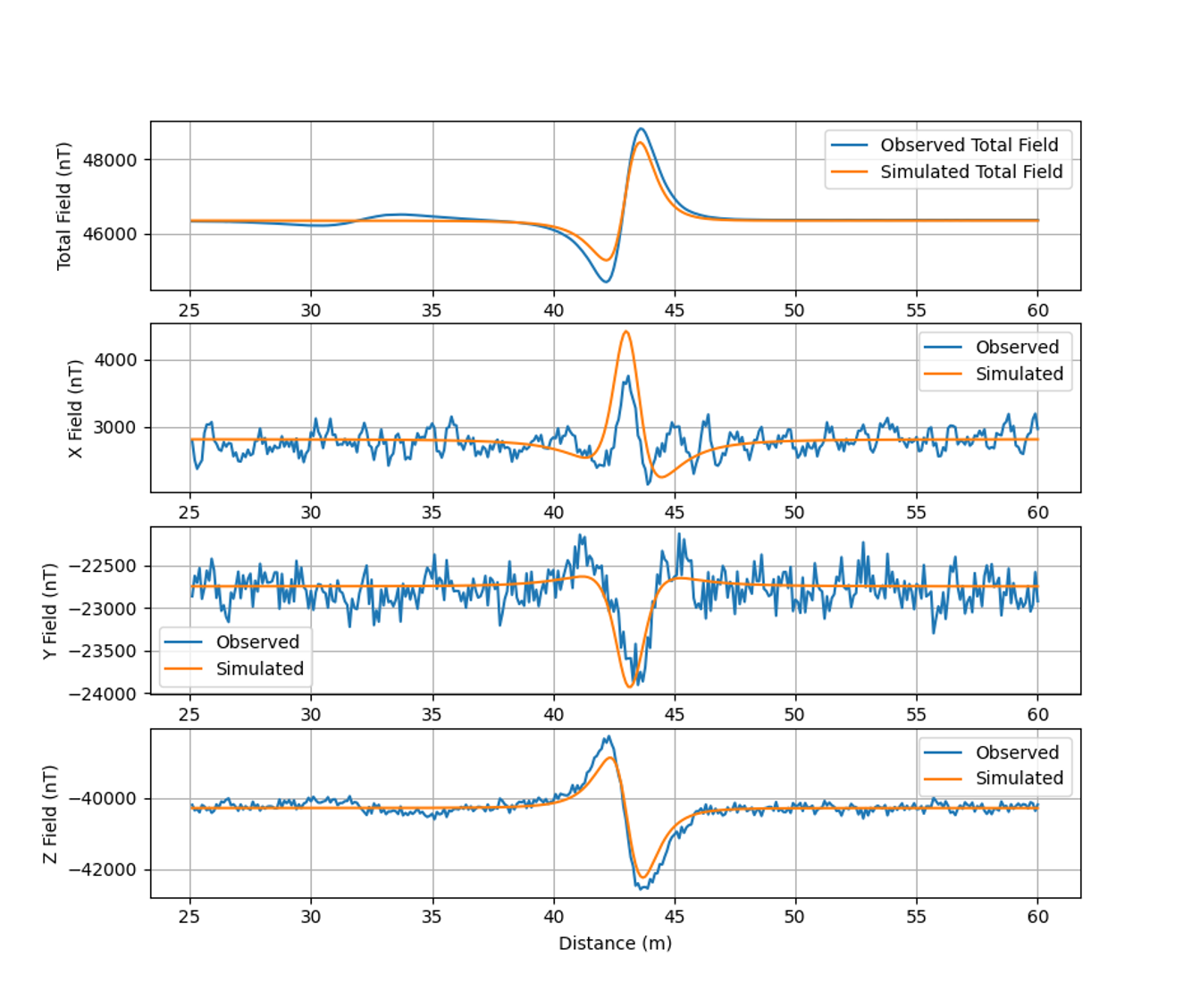
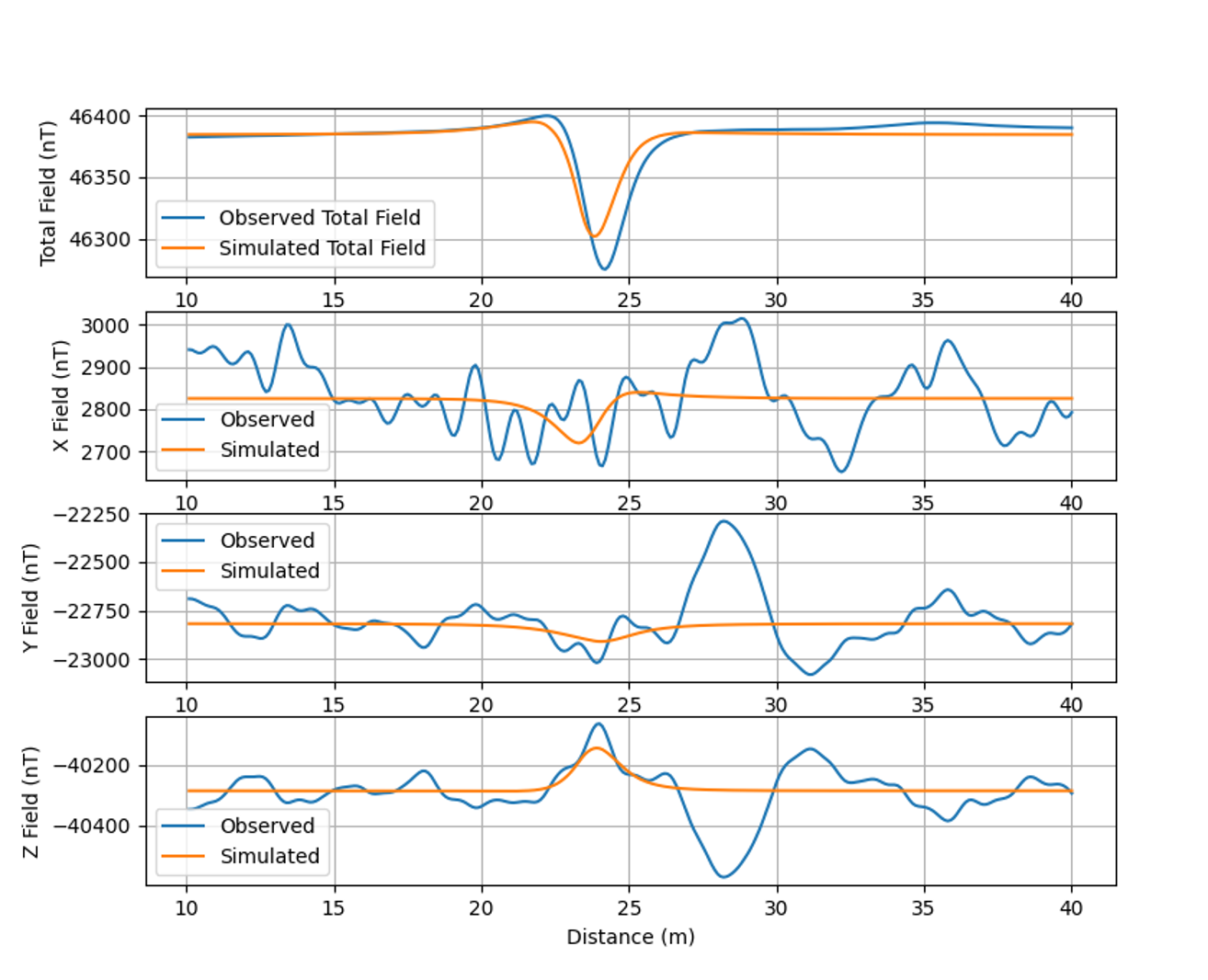
完成不确定性量化研究并建立势场模型后,McKenna 就可以将模拟结果与实验进行比较(图5)。他建立了几个简化模型进行比较,并获得了许多有意义的一致结果。
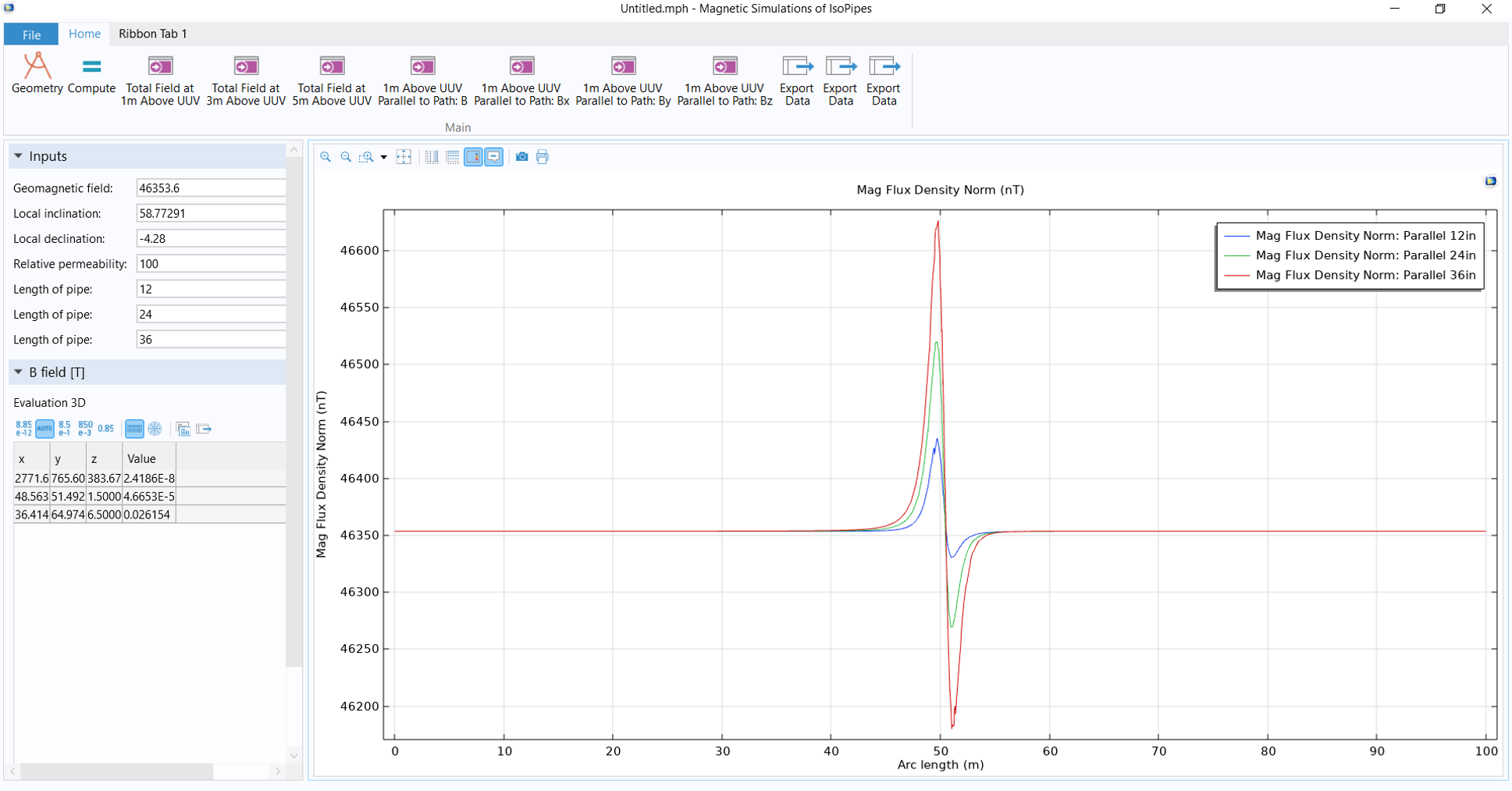
这些积极的结果促使 McKenna 基于经过验证的模型,使用 COMSOL Multiphysics 软件中的 App 开发器,为需要获取大量用于机器学习算法训练数据的数据科学团队创建了一些易于理解的仿真 App(图 6),使科研人员能够生成机器学习的训练数据。
"我根据一些示例开发了这些 App,并在一两个小时内启动并运行它们。" McKenna 说道,“ 你可以在 App 中输入不同的参数,然后就可以看到场线发生的变化,这正是我们想要的。"
数据科学团队需要确保模型能够捕获这些数据点,借助 COMSOL® 软件,无需持续监控模型就可以做到这一点。数据科学团队可以改变参数,生成无人水下航行器预期会遇到和扫描的各种特征信号。仿真 App 为 USM 提供了进行适当训练的算法所需的数据质量和数量。
借助这些仿真 App,USM 能够让各团队分工合作,充分发挥各自专长。"每个人都能在自己的知识领域内有所建树,做这样的事情需要一个团队的协作。" McKenna 总结道。
机器学习技术
研究团队使用的机器学习技术包括长短期记忆网络、回归模型、提升树和深度神经网络模型。
长短期记忆模型用于评估在运行模拟的传感器序列数据时预测能力的变化情况,并可进一步用于确定模拟是否可有效地用于观测数据的数据增强。回归模型、提升树模型和深度神经网络模型可用于确认模拟数据的模式。
这些模型完全是在模拟数据上运行的,长短期记忆模型则是使用总计超过 500,000 个数据点中的 10 个数据点的嵌入序列运行的。这些模型与包括时间序列分析在内的序列数据兼容,因此特别适合阐释无人水下航行器集成传感器的数据。
正如 McKenna 在 COMSOL 用户年会上发表的论文(参考文献 1)所述,"我们的 COMSOL 模型生成的合成数据集提供了各种不同的训练示例,使机器学习模型能够学习与不同目标类型相关的复杂时间关系和特征模式。”
智能无人水下航行器的未来展望
河流、湖泊和航道的底部存在着铁磁结构和设备,出于安全和导航目的,应对其进行记录。无人水下航行器在完善导航图方面可以发挥重要作用,标记出潜在危险,提高港口的通航能力。例如,如果一场自然灾害导致船只沉没并在意外地点留下残骸,智能无人水下航行器能够快速扫描海底,洞察海浪之下的情况。
USM 研究团队正在研究仿真和机器学习的融合,以提高无人水下航行器的预测能力。然而,McKenna 认为这个项目只是 “将仿真驱动的机器学习集成到各种地球物理研究和工程领域中的蓝图" 中的一小步,他未来的目标是在模型中增加更多的复杂性,并重点关注那些尚未考虑在内的现象,包括较大铁磁性物体的自消磁,以及纳入声学和热学等更多物理概念。McKenna 还希望通过 COMSOL Server™ 在团队内部管理和部署仿真 App,用于机器学习训练,开发更逼真的海底模型,并进一步推动不确定性量化优化的应用。
致谢
这项研究得到了美国海军研究办公室对 USM 的资助。
参考文献
- J. McKenna et al., "Potential Fields Modeling to Support Machine Learning Applications in Maritime Environments," COMSOL Conference 2024 Boston, 2024; https://www.comsol.com/paper/potential-fields-modeling-to-support-machine-learning-applications-in-maritime-environments-135922