Please login with a confirmed email address before reporting spam
First some comments to what you have tried:
Thank you so much @Henrik for your detailed explanation.
Your advice definitely make sense to me. So, I tried to follow it, but failed to get expected results. I am not sure if I did it right. I was wondering if you could give furher more guidance.
About the Comments,
The default 1E8 (=100 MPa) is characteristic for steel-to-steel contact.
Is this true only for the SI unit system or for all unit systems? I mean, does the meaning of this value keep consistant with the unit system?
I am used to reset the 'Unit System' to 'None' like in other FEM softwares. But I keep it in my mind that the unit system is 'mm for length, N for force, t for mass, MPa for pressure, ...'. Under this circumstance, does the default 1E8 represent 100MPa or 1E8 MPa?
(refine the mesh) Can be a good idea. In particular, you want to resolve the curvature of the indentor.
About the mesh refinement, I encountered another problem. Sometimes, I have to refine the mesh. Otherwise, the derived 'indentation modulus v.s. depth' curve isn't smooth.
But when the mesh is refined, the distribution of contact pressure becomes bumpy near the contact edge (see the figure below or the attached graph). The contact pressure increases and decreased suddently by a vary large extent. Could you give me a hint about this?
Here are some trail run following your advice.
What you need to do is to make sure that you get more iterations. You can either decrease the solver tolerance or the scalings of the degrees of freedom.
I changed the 'Relative tolerance' from default 0.001 to 0.0001 under the subnode 'Study 5-->Solver Configurations-->Solution5 -->Stationary Solver 1 -->General'. And the 'Maximum number of refinements' from 15 to 30 under '...-->Stationary Solver1 --> Direct-->Error-->Iterative refinement'. The 'Maximum number of iterations' in the setting for 'segregated 1' is also change from 15 to 30.
The calculation time apprximately doubled. I can see from the Convergence Plot that the Error is below 1E-4 now, but the Graphics view still gives a penetration plot and no appreciable change can be observed.
A low penalty factor will give meany iterations, and also a risk that the convergence criteria look fulfilled while there is still an overlap.
I use Segrated Augmented Lagrangian Method. In previous simulation, I used the preset penalty factor control tunned for speed, since the indenter initially touches the structure through no more than 1 point and there is presumably no contact pressure.
I tried to manually tune the penalty factor multipiler. The default 1 makes no difference. So, I changed it to 10 (which is the maximun contact pressure gained from previous simulation). This caused divergence.
How to set the penalty factor control so that better performance than the preset parameters can be achieved? Could you shed more light on this?
Another hint: Using a rigid domain / rigid material for the indentor is overkill. You can just use a Prescribed Displacement on that domain.
I use Prescribed Displacement this time in substitution of the previous Rigid Material to model the rigid indenter. The displacement is prescribed as (u0r,u0z)=(0,-hi*pw1(par)). The solver configurations is reset to default before running the computation.
The deformation plot doesn't change. The penetration still occurs.
I have got loads of questions. Thank you so~ much for your time and patience.
Best,
HC Liu
>First some comments to what you have tried:
Thank you so much @Henrik for your detailed explanation.
Your advice definitely make sense to me. So, I tried to follow it, but failed to get expected results. I am not sure if I did it right. **I was wondering if you could give furher more guidance**.
**About the Comments**,
> The default 1E8 (=100 MPa) is characteristic for steel-to-steel contact.
**Is this true only for the SI unit system or for all unit systems**? I mean, does the meaning of this value keep consistant with the unit system?
I am used to reset the 'Unit System' to 'None' like in other FEM softwares. But I keep it in my mind that the unit system is 'mm for length, N for force, t for mass, MPa for pressure, ...'. Under this circumstance, does the default 1E8 represent 100MPa or 1E8 MPa?
> (refine the mesh) Can be a good idea. In particular, you want to resolve the curvature of the indentor.
About the mesh refinement, I encountered another problem. Sometimes, I have to refine the mesh. Otherwise, the derived 'indentation modulus v.s. depth' curve isn't smooth.
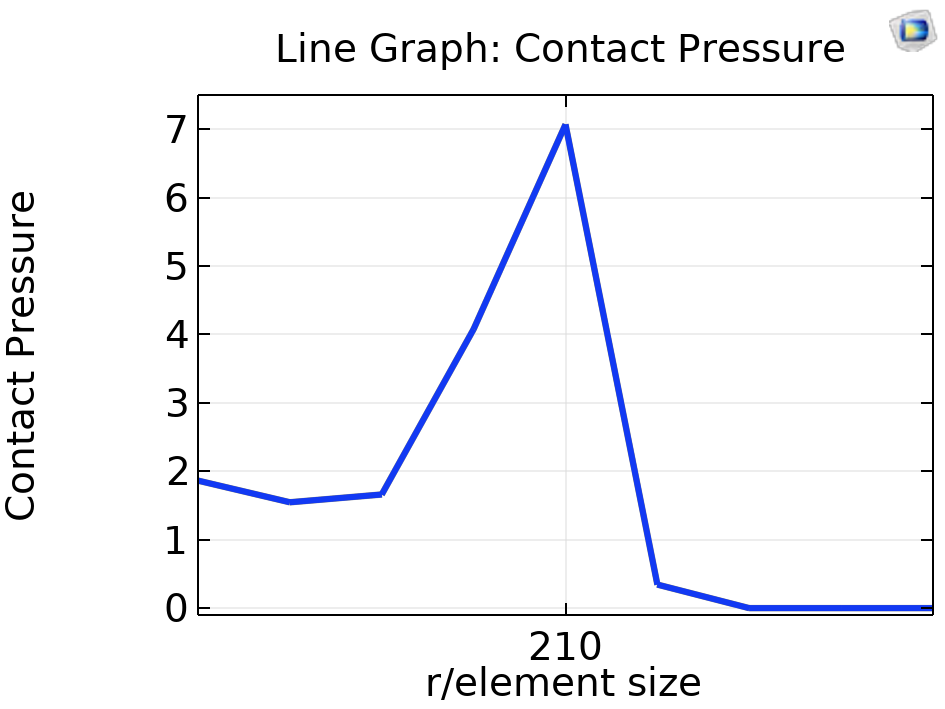
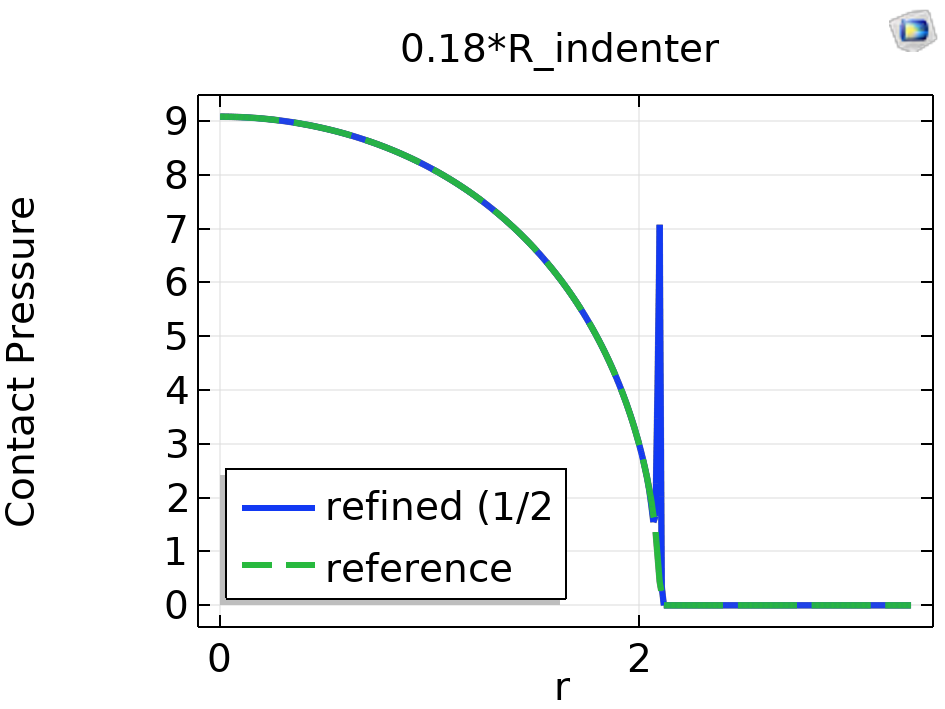
But when the mesh is refined, **the distribution of contact pressure becomes bumpy near the contact edge** (see the figure below or the attached graph). The contact pressure **increases and decreased suddently by a vary large extent**. Could you give me a hint about this?

**Here are some trail run following your advice**.
> What you need to do is to make sure that you get more iterations. You can either decrease the solver tolerance or the scalings of the degrees of freedom.
I changed the '**Relative tolerance**' from default 0.001 to 0.0001 under the subnode 'Study 5-->Solver Configurations-->Solution5 -->Stationary Solver 1 -->General'. And the '**Maximum number of refinements**' from 15 to 30 under '...-->Stationary Solver1 --> Direct-->Error-->Iterative refinement'. The '**Maximum number of iterations**' in the setting for 'segregated 1' is also change from 15 to 30.
The calculation time apprximately doubled. I can see from the Convergence Plot that the Error is below 1E-4 now, but **the Graphics view still gives a penetration plot** and no appreciable change can be observed.
> A low penalty factor will give meany iterations, and also a risk that the convergence criteria look fulfilled while there is still an overlap.
I use **Segrated Augmented Lagrangian** Method. In previous simulation, I used the **preset** penalty factor control tunned for **speed**, since the indenter initially touches the structure through no more than 1 point and there is presumably no contact pressure.
I tried to **manually tune** the **penalty factor multipiler**. The default 1 makes no difference. So, I changed it to 10 (which is the maximun contact pressure gained from previous simulation). This caused divergence.
How to set the **penalty factor control** so that better performance than the **preset** parameters can be achieved? Could you shed more light on this?
> Another hint: Using a rigid domain / rigid material for the indentor is overkill. You can just use a Prescribed Displacement on that domain.
I use **Prescribed Displacement** this time in substitution of the previous **Rigid Material** to model the rigid indenter. The displacement is prescribed as (u0r,u0z)=(0,-hi\*pw1(par)). The solver configurations is reset to default before running the computation.
The deformation plot doesn't change. The penetration still occurs.
I have got loads of questions. **Thank you so~ much for your time and patience**.
Best,
HC Liu