使用变形几何和动网格功能对域进行平移、缩放和旋转
变形几何 和 动网格 接口适用于模拟域自由变形或以指定方式移动的情况,变形可以是时间的函数,也可以是以参数扫描或辅助扫描建立的模型参数的函数。使用这些接口通常可以避免重新划分几何体或求解额外的方程。
动网格和变形几何接口
在大多数情况下,动网格 接口是最适合模拟变形的接口,因为其中的材料和解都会随着空间变形而移动。另一方面,变形几何 接口意味着材料在空间平移过程中被添加或移除,适用于使用 固体力学 接口的模型,因为 固体力学 接口本身计算的是在 材料 坐标系上定义的固体材料的变形,而在同一域内不可能同时求解 固体力学 和 动网格。另一种追踪变形的方法是利用以下 3 种坐标系:
- 几何 坐标系,软件默认设置为
 , 在三维 CAD 几何体中固定不动。
, 在三维 CAD 几何体中固定不动。 - 材料 坐标系,软件默认设置为
 ,在实体域的材料中固定不动。模型中的 变形几何 或 形状优化 特征可能会导致 材料 和 几何 坐标系的不同,这种差异代表材料的不同配置,即实体对象的不同形状。
,在实体域的材料中固定不动。模型中的 变形几何 或 形状优化 特征可能会导致 材料 和 几何 坐标系的不同,这种差异代表材料的不同配置,即实体对象的不同形状。 - 空间 坐标系,软件默认设置为
 , 在空间中固定不动。空间 坐标系和材料坐标系之间的差异可能是由控制 空间 坐标系的 动网格特征 或结构力学接口引起的,代表材料的位移。
, 在空间中固定不动。空间 坐标系和材料坐标系之间的差异可能是由控制 空间 坐标系的 动网格特征 或结构力学接口引起的,代表材料的位移。
如下面的屏幕截图所示,要确认使用哪个坐标系绘图,我们可以使用 数据集 特征中的坐标系设置。每个绘图组还可以在选定的坐标系内绘制数据集的边,如下图所示。
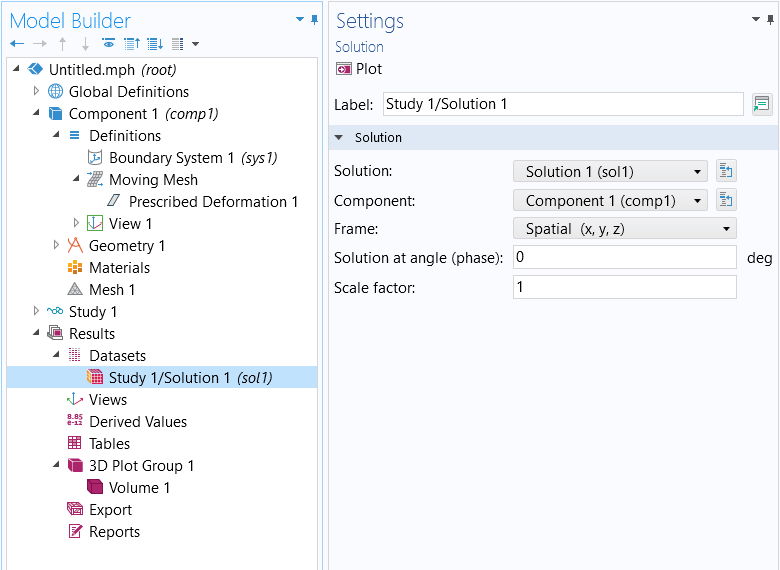
屏幕截图显示了如何选择用于结果绘制的坐标系。
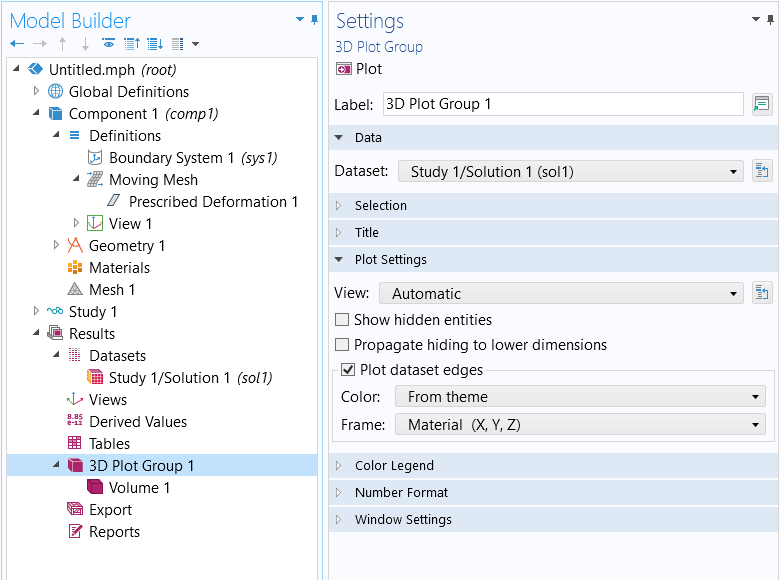
在每个绘图组中,可以使用不同的坐标系绘制数据集的边。
模拟平移
要模拟域的平移,例如空间中一个零件的移动,我们可以定义一个空间平移曲线的表达式:  。 在 动网格>指定变形 特征中使用这些表达式,使域中的每个点从其原始位置偏移相同的量。
。 在 动网格>指定变形 特征中使用这些表达式,使域中的每个点从其原始位置偏移相同的量。
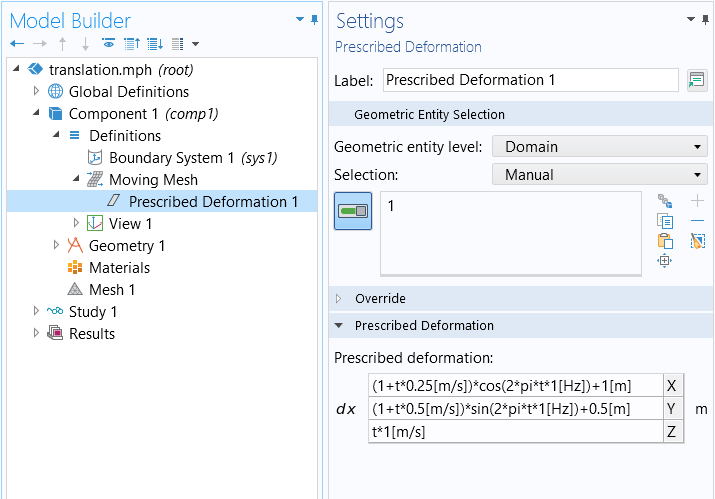
使用 指定变形 特征实现平移。
例如,要使一个域沿着与 Z 轴平行的直线为中心的螺旋路径移动,并偏离其原始位置,可使用以下表达式指定变形:
dx = (1[m]+t*0.25[m/s])*cos(2*pi*t*1[Hz])+1[m]
dy = (1[m]+t*0.5[m/s])*sin(2*pi*t*1[Hz])+0.5[m]
dz = t*1[m/s]
上述屏幕截图显示了这个平移示例的设置,本文也随附了这个示例模型的练习文件。
模拟缩放和映射
要模拟一个基于全局笛卡尔坐标系放大或缩小的域,必须定义一个比例因子矩阵和一个缩放点。比例因子矩阵  是一个对角矩阵,矩阵元素与缩放笛卡尔方向对应。例如:
是一个对角矩阵,矩阵元素与缩放笛卡尔方向对应。例如:

表示保持 x 维不变,将 y 维放大两倍,并将 z 维缩小一半。
还需要定义缩放域的点  ,从而定义域的变形场:
,从而定义域的变形场:

其中  是单位矩阵。
是单位矩阵。
例如,要按上述比例因子使矩阵围绕点(1, 2, 3)进行缩放,可以指定一个变形量:
dx = (1-1)*(X-1[m])
dy = (2-1)*(Y-2[m])
dz = (0.5-1)*(Z-3[m])
此外,还可以使矩阵元素成为时间或其他模型参数的函数。本文随附的练习文件中提供了一个示例。
模拟旋转、缩放和平移
模拟广义的旋转可能会使建模变得复杂。本文将讨论两种情况:围绕笛卡尔坐标轴的旋转和更普遍的三维旋转。
对于围绕全局笛卡尔轴的旋转,只需定义一个旋转矩阵和旋转中心坐标即可。例如,考虑将一个零件围绕与 Z 轴平行并经过点  的直线旋转一个角度 θ。任何平行于 Z 轴的直线的旋转矩阵为
的直线旋转一个角度 θ。任何平行于 Z 轴的直线的旋转矩阵为

围绕点 ,可使用以下变形表达式:

这相当于使用了旋转域 特征。随附的练习文件中包含了一个这样的示例。
对于更常见的情况,即在空间任意旋转和移动的零件,需要在概念上定义两个坐标系,分别位于  和
和  的点
的点  和
和  ,如下图所示。将第一个坐标系 与零件进行匹配,目标是旋转和移动零件,使零件坐标系与 对齐。
,如下图所示。将第一个坐标系 与零件进行匹配,目标是旋转和移动零件,使零件坐标系与 对齐。
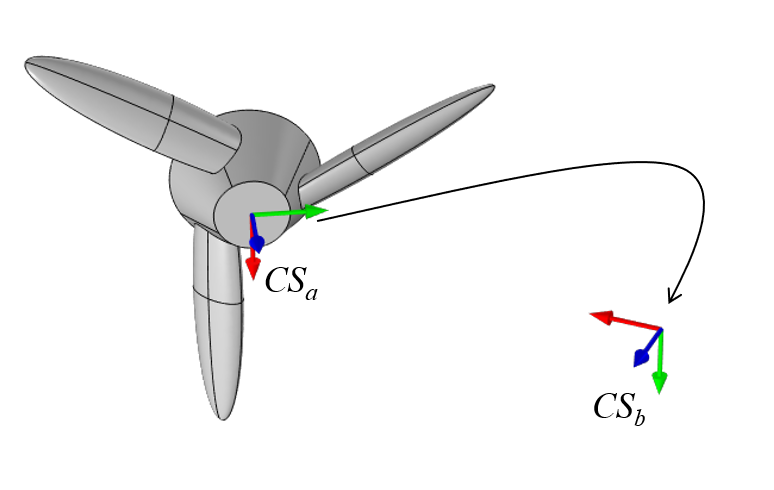
一个带坐标系的零件,旋转和移动该零件与另一个坐标系平行。坐标系的第一、二和三轴分别用红色、绿色和蓝色表示。
这两个坐标系都由两个正交向量  和
和  定义,第三个向量由叉积
定义,第三个向量由叉积  定义。这些向量定义了一个变换矩阵:
定义。这些向量定义了一个变换矩阵:

该变换矩阵将零件从一个坐标系旋转到另一个坐标系。上述矩阵相当于应用了一个旋转,将零件从 旋转到全局笛卡尔坐标系 CS。 该旋转围绕 进行,然后从全局笛卡尔坐标系旋转到 并移动到 点,这个变形过程使用以下表达式描述:

也可以加入缩放。要在 坐标系中进行缩放,可通过以下表达式综合使用缩放、旋转和平移:

随附的练习文件中就有一个很好的示例。
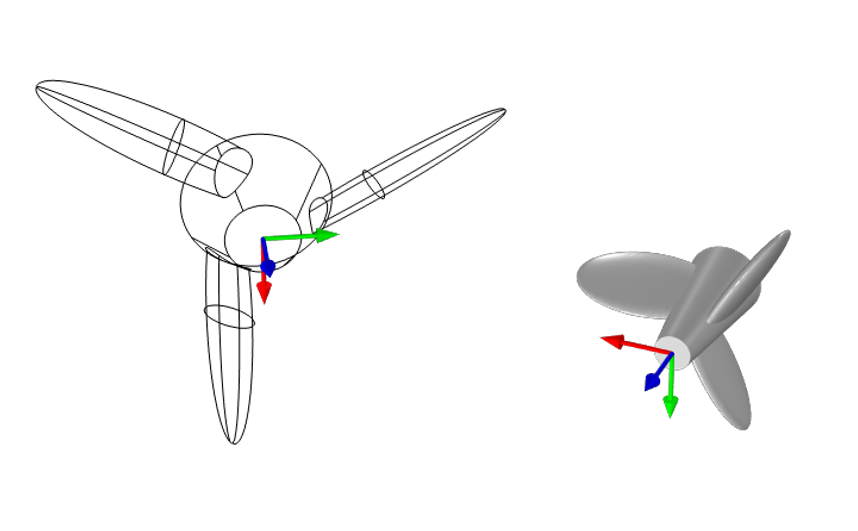
在两个坐标系中应用了平移、各向异性缩放以及旋转。原始的未变形几何以线框形式显示。
请提交与此页面相关的反馈,或点击此处联系技术支持。