技术资料
白皮书
Optimal PDE Control Using COMSOL Multiphysics
发布日期 2008
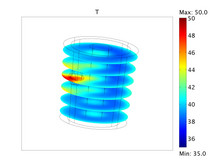
An optimal control problem (OCP) is studied to a PDE of elliptic type as well as state constraints. The resulting optimality system contains two PDEs, one algebraic equation and the so called complementary slackness conditions, i.e. dual products between function spaces. At this point, different regularization techniques come into use. In this paper we introduce a Barrier method as one possible way to regularize state constraints, which leads to an easily implementable path-following algorithm. To illustrate this method, we solve first a constructed problem with a known solution. Here, we can verify the rate of convergence of the path-following method. Second, a simplified hyperthermia problem in 3D is solved by using COMSOL Multiphysics.
下载
- Pruefert_pres.pdf - 0.76MB
- Pruefert.pdf - 0.54MB