使用集总方法模拟扬声器驱动器
本课程的前四个部分讨论了如何使用有限元法对扬声器驱动器进行完整的电-振动-声学耦合分析。在设计驱动器阶段,对包含驱动器所有电磁和机械部件进行这种详尽的分析很有必要。但当分析处于系统层面时(例如,研究驱动器在安装系统中的特性,或设计一种波导以实现特定的辐射模式),在模型中包含所有驱动器组件并求解所有涉及的物理问题,不仅成本高昂,甚至可能行不通。当存在可用并且适用的驱动器集总表示方法时,这种详尽分析可能也没有必要。
当驱动器中的不同机械部件呈活塞式运动时,可采用集总模型,对于驱动器尺寸远小于波长的低频来说,这一假设是合理的。基于手头已有的信息,我们可以使用以下几种集总方法来描述驱动器的性能:
在辐射表面指定运动。当您掌握了辐射声音的运动表面的准确信息时,推荐使用这种方法。表征运动的量可以是位移、速度或加速度。在这种方法中,不存在从声学域到换能器的反馈,也不包括声源阻抗。
使用电磁力的集总表示驱动扬声器。假定研究动圈式换能器,作用在音圈上的洛伦兹力可以通过包括音圈的力因子和阻塞音圈阻抗(即线圈静止时的电阻抗)在内的集总参数计算。
使用集总机电(或电声)表示驱动器,对于小变形(即 Thiele-Small 参数),用小信号参数表征;对于大变形,用大信号参数表征。这种集总电路类比表示扬声器电子和机械部件的特征,允许换能器和声学域之间双向耦合。
在电气系统中使用电路类比,在机械系统中使用集总机械类比,集总部件包括质量块、弹簧和阻尼器。
这四种方法中使用的参数都可以从测量或求解的子模型中获得,而且可以是频率的函数。前两种方法完全不求解电磁场,而后两种方法则在计算中包含电特性,但通过零维常微分方程求解。所有这些集总模型都可以与求解声场的有限元模型耦合。接下来,让我们详细了解这四种方法。
方法一:指定辐射表面的运动
要使用这种方法,您需要能直接描述辐射表面运动(如振膜的运动)的数据,或来自扬声器的输出(如特定表面的声输出),并且通常在几何结构中只需要包含辐射表面来表示驱动器即可。大多数情况下,只需求解一个压力声学模型,而辐射表面要么是所模拟声学域的内部边界(求解两侧声场),要么是外部边界(只模拟一侧的声辐射)。以下是一些相关的案例教程:
下列图片显示了这些案例中代表辐射表面的边界(以蓝色突标出)。
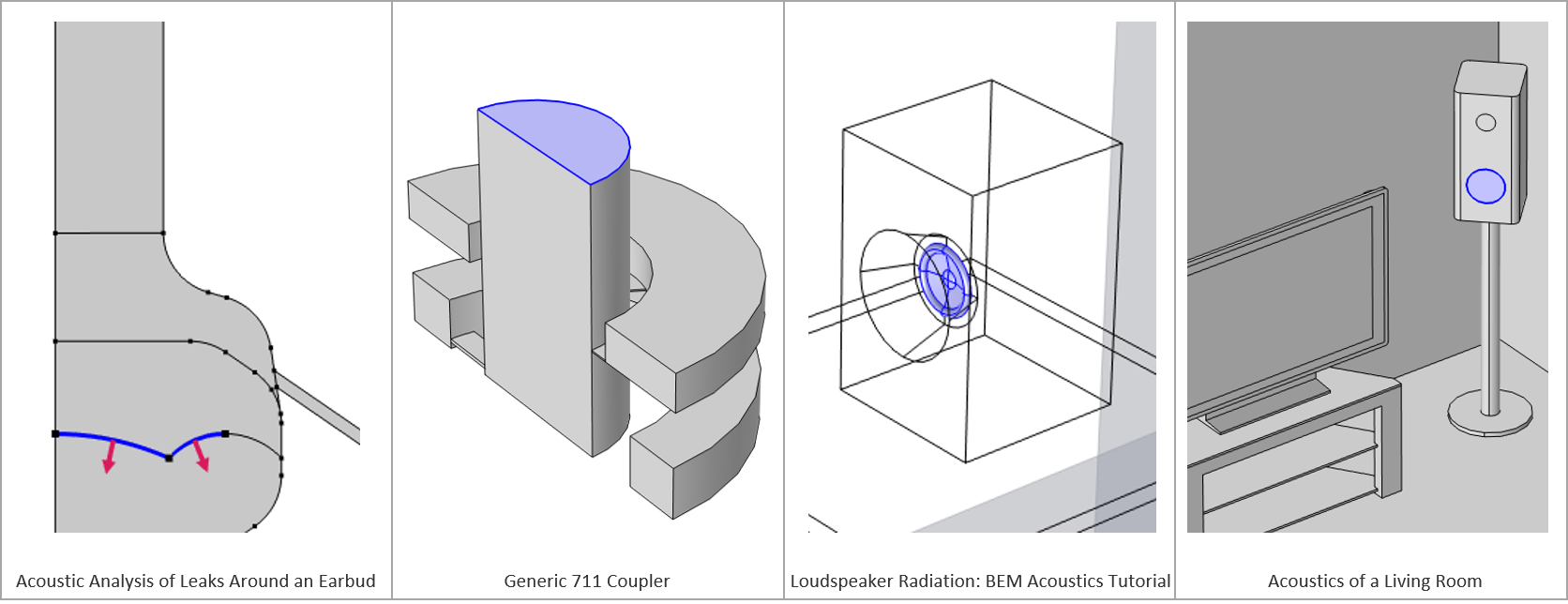
用蓝色标示的边界代表案例教程中扬声器驱动器的辐射表面。
下图显示了如何在辐射表面指定运动。您可以指定法线方向上的加速度、速度或位移,或它们在内部和外部边界上的分量。同样,如果适用,这些量也可以设定为频率的函数。指定的运动也可以是空间坐标的函数或已求解子模型的解。
 Settings for Interior Normal Velocity are shown along with a graphic of a 2D model with red arrows tangential to boundaries selected in blue.
添加了 内部法向速度 的边界条件,用于指定内部辐射表面的运动。
Settings for Interior Normal Velocity are shown along with a graphic of a 2D model with red arrows tangential to boundaries selected in blue.
添加了 内部法向速度 的边界条件,用于指定内部辐射表面的运动。
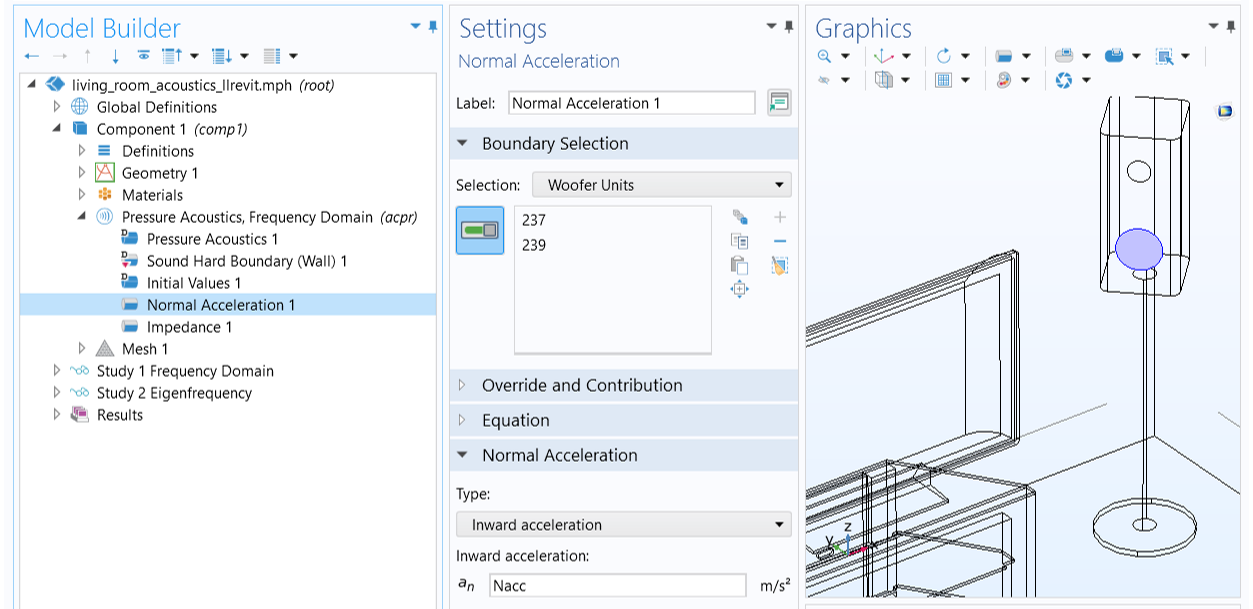 Settings for Normal Acceleration are shown with a graphic of a wireframe box with a blue circle on the leading face.
外部辐射表面的运动通过施加 法向加速度 的边界条件来指定。
Settings for Normal Acceleration are shown with a graphic of a wireframe box with a blue circle on the leading face.
外部辐射表面的运动通过施加 法向加速度 的边界条件来指定。
需要注意的是,这种方法使用的是理想化的声源,其中不存在声反馈。不过,它仍然是一种有用的分析方法,尤其是当您主要关注辐射特性或空间响应时。
方法二:使用集总电磁力
根据洛伦兹力定律,放置在磁场中的载流导线所受的总净力和反电动势(运动线圈中的感应电压)由以下公式计算得出:



式中,  为力矢量,
为力矢量, 为线圈长度,
为线圈长度, 为线圈中的总电流,
为线圈中的总电流, 为外部产生的磁通密度,
为外部产生的磁通密度, 为外加驱动电压,
为外加驱动电压, 表示反电动势,
表示反电动势, 为阻塞电阻抗,
为阻塞电阻抗, 为移动线圈的速度矢量。
为移动线圈的速度矢量。
由上述关系式,我们可以得到类似于本系列课程第二部分中所描述的动态驱动器中音圈上的总驱动力集总表示法,如下所示:

式中, 是磁场强度与音圈长度的乘积,称为 力因子,
是磁场强度与音圈长度的乘积,称为 力因子, 是音圈在轴向的速度。
是音圈在轴向的速度。
力因子 和阻塞电阻抗 可以通过测量获得,也可以通过第二部分所述的详细有限元模型计算得出。我们将在第六部分中讨论如何计算它们。
对于一个使用中的特定驱动器,在已知 和 的情况下,可使用上述表达式指定线圈所承受的总力。这种方法需要将驱动器的运动部件包括在几何结构中,并进行全面的振动声学(声学-结构相互作用)分析,以模拟运动部件的振动及其辐射声。以下为使用这种方法的一些案例教程:
第一个案例模拟了安装在低音反射(敞开式)音箱内的扬声器驱动器的声学行为。驱动器的电磁特性来自 扬声器驱动器-频域分析 教程模型,扬声器的不同结构部件(如箱体和驱动器)使用 固体力学 和 壳 接口模拟,箱体内的声腔使用 压力声学,频域 接口模拟,而 压力声学,边界元 接口则用于模拟箱体周围的无限域。声-结构边界 多物理场耦合接口用于连接不同的声学和结构物理场,声学 BEM-FEM 边界 多物理场耦合用于耦合通风口处的内部与外部声学。案例模型的几何结构如下图所示。扬声器驱动器朝向 -x 方向,利用 y = 0 平面的对称条件,仅模拟了一半的几何结构。
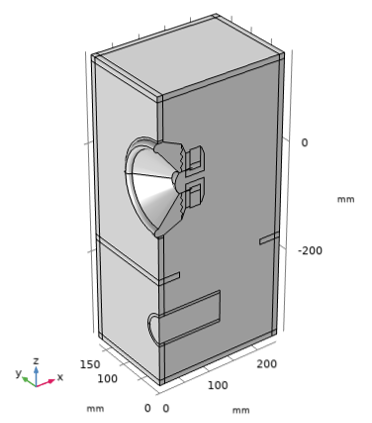
敞开式音箱中的扬声器驱动器 案例教程中使用的几何结构。
在这个示例中, 为常数10.48 N/A(全局定义 > 参数 1 节点), 为由频率的复值函数定义的变量(组件 1 > 定义 > 变量 1 节点),相关的数据源自扬声器驱动器-频域分析教程。在教程的研究 1 中,假定线圈固定不动,完成了磁场的小信号分析,然后就可以计算出力因子和与频率相关的阻塞音圈参数,包括线圈的阻抗、电阻、电感等。最后,将线圈电阻  和电感
和电感  导出并保存为两个 .txt 文件。我们将在课程的第六部分详细讨论如何运行此类分析来提取这些参数。
导出并保存为两个 .txt 文件。我们将在课程的第六部分详细讨论如何运行此类分析来提取这些参数。
这两个 .txt 文件通过两个插值函数(组件 1 > 定义 下的 插值 1 (Rb) 和 插值 2 (Lb))导入到敞开式音箱扬声器驱动器模型中。下图显示了如何使用这两个函数定义阻塞音圈阻抗 ,以及驱动力  。
。
 A_Variables Settings window showing the variables for the total driving force in the model.
模型中定义的总驱动力。
A_Variables Settings window showing the variables for the total driving force in the model.
模型中定义的总驱动力。
如下图所示,在 固体力学 接口,作用在音圈和软铁(顶板和极片)上的力方向相反。模型中,整个线圈上的总作用力()被乘以系数 0.5,因为使用对称的边界条件,只模拟了半个线圈。这里并未假定磁性系统是固定的,因此施加的反作用力包括其运动的影响。不过,磁路上的反作用力对响应的影响很小,因为磁系统要比线圈和扬声器振膜重得多。
 Two identical wireframe cone-shaped objects are shown with different solid blue areas highlighted in the narrow section.
集总电磁力作为反作用力施加在音圈和磁铁系统上。
Two identical wireframe cone-shaped objects are shown with different solid blue areas highlighted in the narrow section.
集总电磁力作为反作用力施加在音圈和磁铁系统上。
只需执行一个 频域 研究步骤,即可求解声-结构相互作用模型。
方法三:使用集总电路模型
众所周知,在扬声器领域,用电路表示换能器是一种成熟且被广泛采用的方法。描述扬声器驱动器低频性能的参数通常称为 Thiele-Small 参数或小信号参数(小变形情况下)或大信号参数(大变形情况下)。前一种情况可以通过频域分析求解,因为尽管 Thiele-Small 参数可作为频率的函数,但它相对于线圈位移是一个常数,所以问题始终保持为线性。然而,在大变形情况下,由于集总参数由线圈位移函数定义,且问题变为非线性,因此需要进行瞬态分析。
您可以选择只对驱动器的电气组件使用集总方法(类似于之前介绍的方法),而对机械组件进行完整仿真,或者对两者都使用集总方法。无论采用哪种方法,都可以使用 电路 接口模拟集总组件,并将其与声学或声-结构相互作用有限元模型耦合,以进行系统分析。让我们以集总扬声器驱动器教程为例,讨论使用软件内置的等效电路和场路耦合功能。
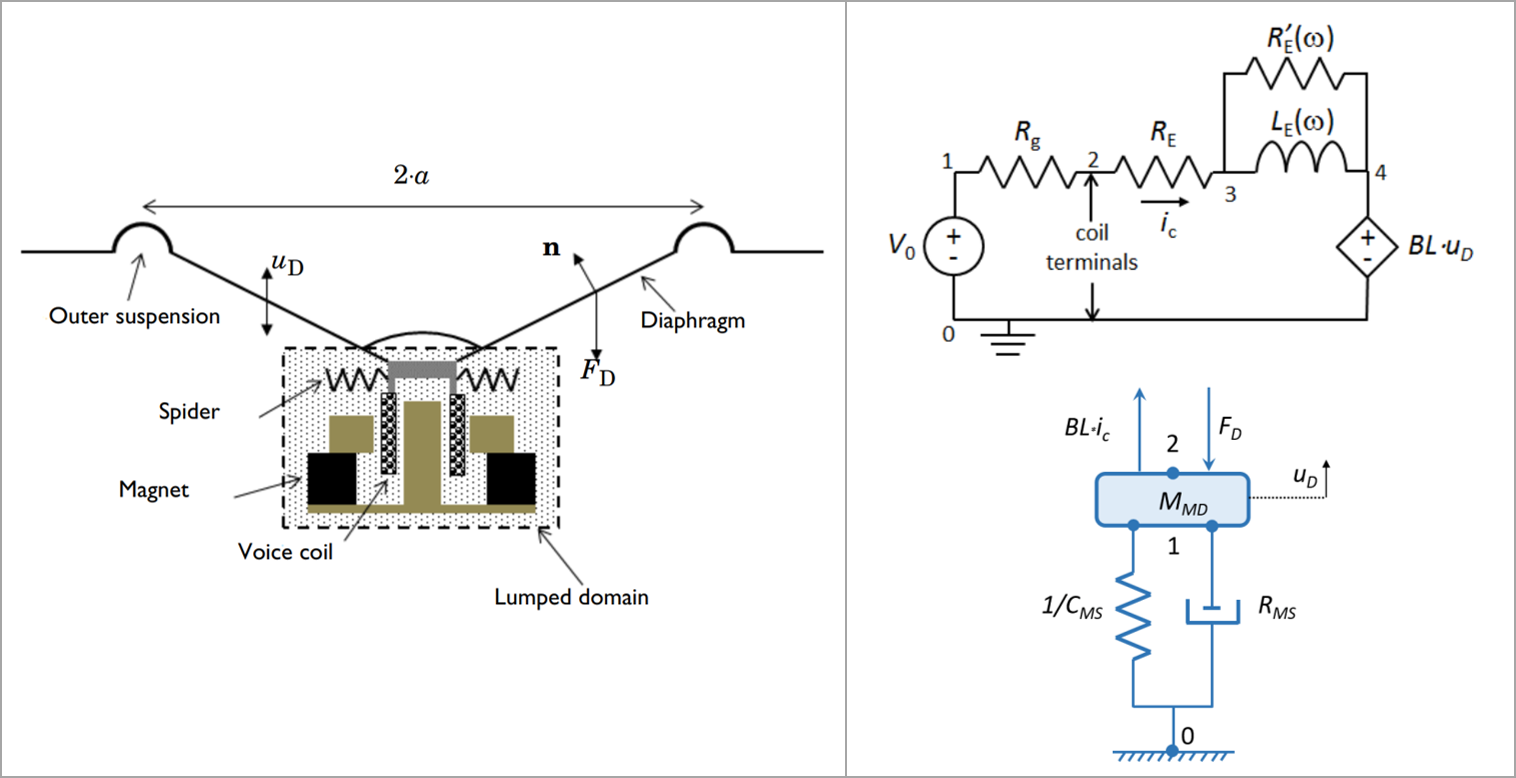
此处模拟的驱动器与课程第二部分中使用的驱动器类似。一个显著的区别是,虚线框内(下图左侧)的机械和电气元件采用集总建模方法,并使用 电路 接口模拟。图中的电路包括音圈和磁系统(永磁体和磁极片),机械部分则包括音圈和扬声器振膜的运动质量、定心支片和外部悬挂系统的弹簧效应,以及这些悬挂阻尼可能造成的损耗。下图右侧的电路图显示了扬声器驱动器电气和机械特性的等效电路。
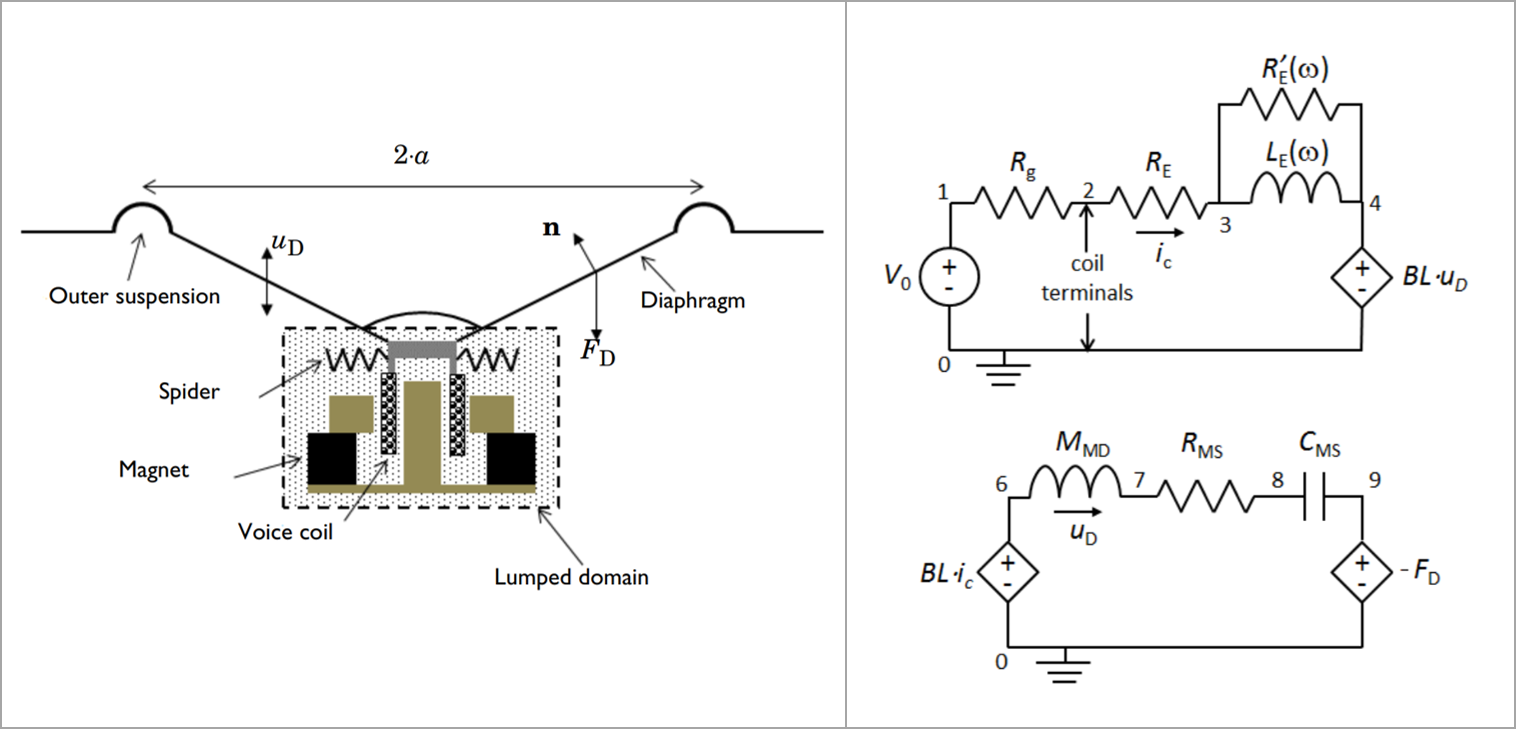
虚线框(左)内的扬声器驱动器组件通过电气特性(右上)和机械特性(右下)的等效电路进行模拟。
在电路系统中,外部电压源用  表示,发电机输出电阻为
表示,发电机输出电阻为  。在此模型中, 设置为零。音圈电阻为
。在此模型中, 设置为零。音圈电阻为  ,与频率有关的音圈电感为
,与频率有关的音圈电感为  。磁路中的损耗通过与频率相关的电阻
。磁路中的损耗通过与频率相关的电阻  模拟。电流控制电压源
模拟。电流控制电压源  代表音圈在磁场中以速度
代表音圈在磁场中以速度  运动时产生的反向感应电磁电压 。 是力因子,为磁场强度与音圈长度 的乘积。在电路中,电流表示为
运动时产生的反向感应电磁电压 。 是力因子,为磁场强度与音圈长度 的乘积。在电路中,电流表示为  。
。
值得一提的是,音圈阻抗有许多经典的集总表示法,这里使用的是 Leach 模型。也可以建立其他模型,如简单的 LR、LR-2、LR-3 或 Wright 模型。所需的模型拓扑结构可在设置 电路 接口时定义。
在机械系统的电路中,使用了阻抗类比法。其中,电路中的电流 是音圈和扬声器音盆在轴向的速度(上图左)。音圈在电流作用下的洛伦兹力()由  给出,并作用在质量
给出,并作用在质量  (音圈和振膜组件)的系统上。电阻
(音圈和振膜组件)的系统上。电阻  代表阻尼,而电容
代表阻尼,而电容  代表扬声器悬架(定心支片和外悬架)的机械塑性。最后,电压源
代表扬声器悬架(定心支片和外悬架)的机械塑性。最后,电压源  代表作用在扬声器振膜上的压力(轴向)。请注意,负号表示该力与振膜的运动方向相反。压力的计算公式为
代表作用在扬声器振膜上的压力(轴向)。请注意,负号表示该力与振膜的运动方向相反。压力的计算公式为

式中, 是振膜上的压降,
是振膜上的压降, 是表面法线
是表面法线  的轴向分量。这个表达式给出了从声学有限元模型到集总电路模型的耦合。反过来,从电路模型到有限元模型的耦合是指定振膜表面速度 的结果,其值为
的轴向分量。这个表达式给出了从声学有限元模型到集总电路模型的耦合。反过来,从电路模型到有限元模型的耦合是指定振膜表面速度 的结果,其值为

式中, 是轴向单位矢量, 是机械回路中的电流。
是轴向单位矢量, 是机械回路中的电流。
COMSOL® 中各种内置的 集总扬声器 边界条件可自动处理和设置这些表达式和耦合关系。现在,就让我们来了解一下。
使用集总扬声器边界条件的电路–有限元耦合
压力声学有限元模型的计算域如下图所示,其中包含位于二维轴对称模型的无限障板中的扬声器(红线),以及音盆、防尘盖和外部悬挂系统。
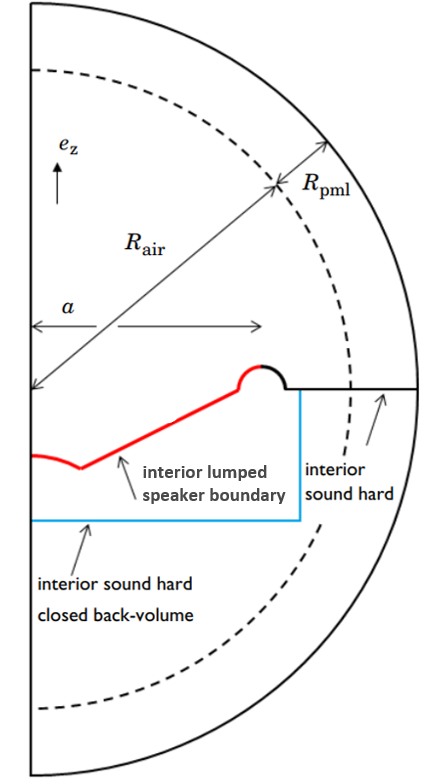 A semicircle with labeled red, blue, and black lines on the interior.
A semicircle with labeled red, blue, and black lines on the interior.
需要将有限元压力声学模型和集总电路模型之间的耦合应用于扬声器边界,可通过以下两个步骤实现:
- 如下图所示,在 压力声学,频域 接口中添加 内部集总扬声器边界 条件,从机械电路模拟中获取电流(即电路图中的 或用户界面显示的方程中的
 ),并用于指定扬声器表面的轴向速度
),并用于指定扬声器表面的轴向速度  。它还计算由通过振膜的压降引起的轴向压力(即电路图中的
。它还计算由通过振膜的压降引起的轴向压力(即电路图中的  或用户界面中显示的方程中的
或用户界面中显示的方程中的  ),并会反馈到集总电路模型中。
),并会反馈到集总电路模型中。
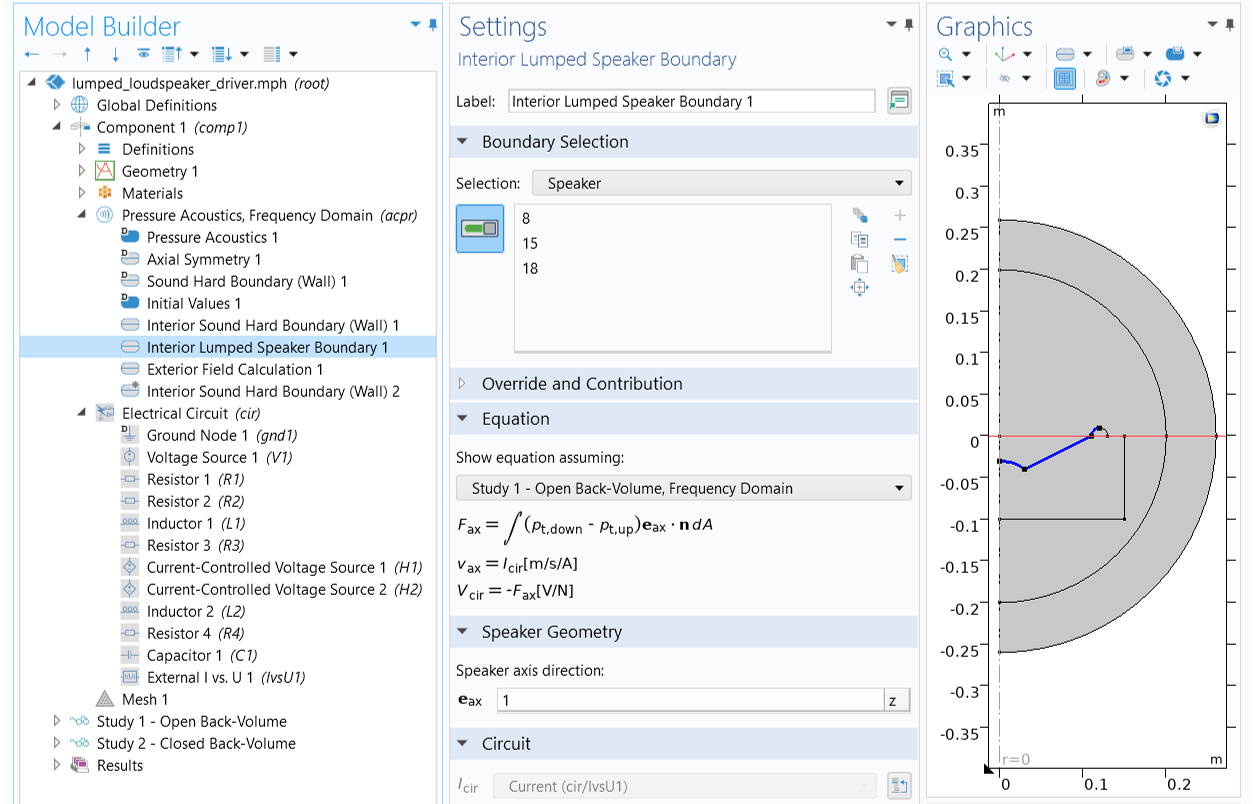 A Settings window for an Interior Lumped Speaker Boundary feature and a gray semicircle with blue selected boundaries.
有限元声学模型通过内置的 内部集总扬声器边界 特征与集总电路驱动器模型耦合。
A Settings window for an Interior Lumped Speaker Boundary feature and a gray semicircle with blue selected boundaries.
有限元声学模型通过内置的 内部集总扬声器边界 特征与集总电路驱动器模型耦合。
- 如下图所示,在 电路 接口中添加 外部 I vs. U,并将 电势 设置为 来自集总扬声器边界的电压,将在 压力声学,频域 接口的 内部集总扬声器边界 功能中计算出的轴向压力力作为电压源施加到电路中。
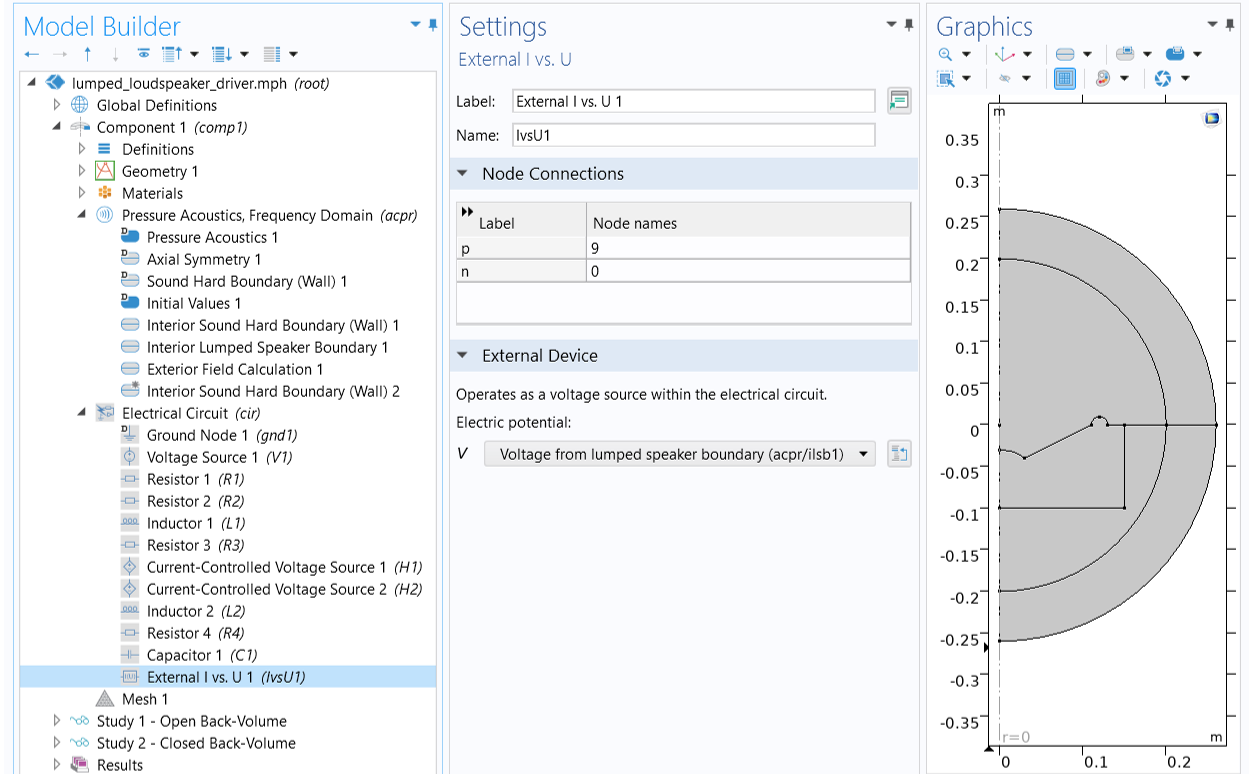 A Settings window for an External I vs. U feature and a gray semicircle with black internal boundaries.
集总电路模型通过 外部 I vs. U 功能与有限元声学模型耦合。
A Settings window for an External I vs. U feature and a gray semicircle with black internal boundaries.
集总电路模型通过 外部 I vs. U 功能与有限元声学模型耦合。
当振膜采用实体模拟,而不是像上面讨论的内部边界/壳(内部条件)时,您可以通过添加两个 集总扬声器边界 特征来设置内部集总扬声器,一个应用于上边界,另一个应用于下边界,如下图所示。对于以前的版本(6.1 以前),有必要将后腔体音量修正设置为较大值,以消除这种集总表示的顺性。在 6.2 及更高版本中,应使用 无修正 选项,校正阻抗为零。
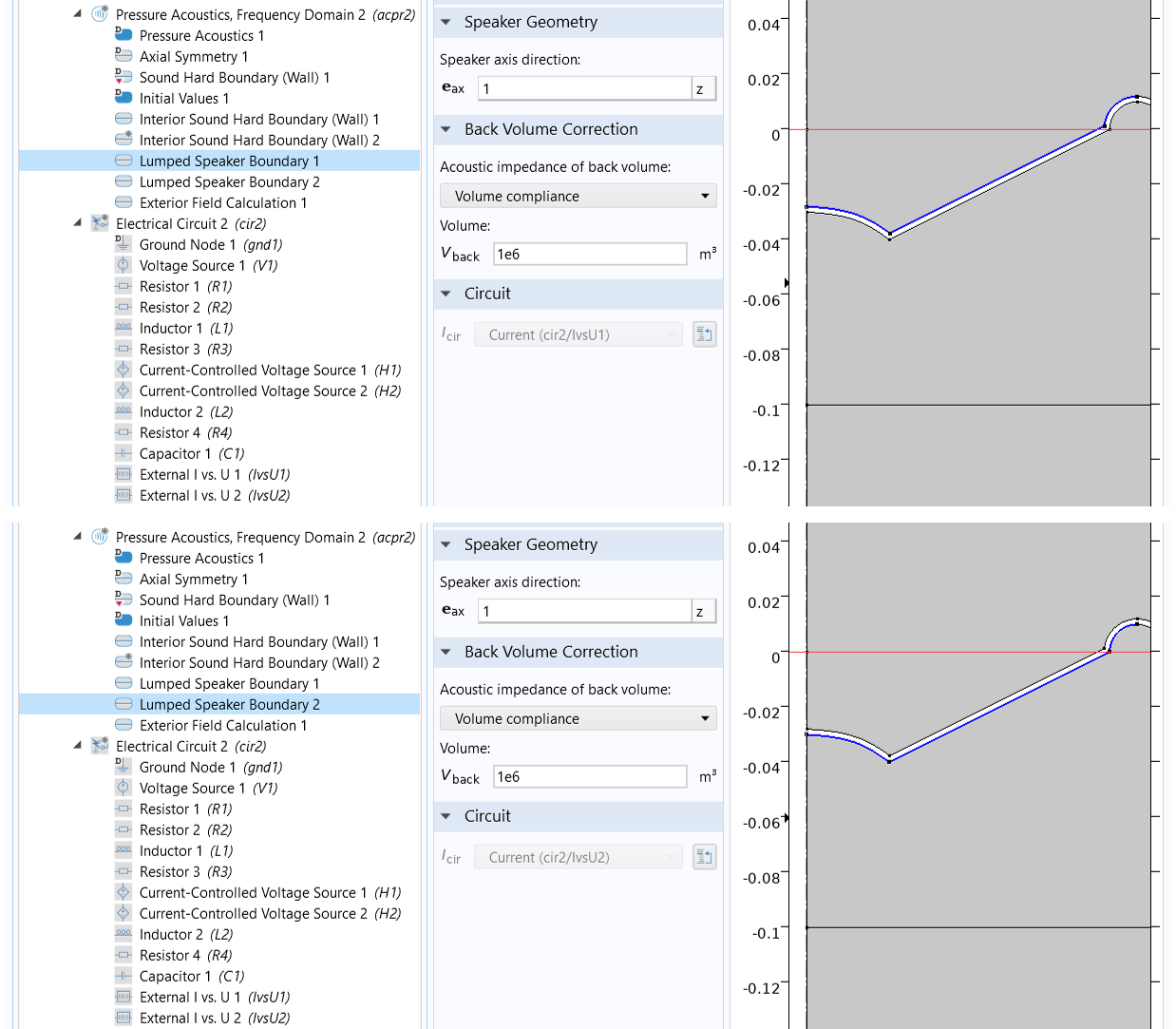 Large back volume values are shown for two graphics with blue upper boundaries and blue lower boundaries, respectively.
对于在 6.1 版本或更早的版本中构建的模型,可在 后腔体校正 菜单中设置一个较大值。
Large back volume values are shown for two graphics with blue upper boundaries and blue lower boundaries, respectively.
对于在 6.1 版本或更早的版本中构建的模型,可在 后腔体校正 菜单中设置一个较大值。
 The No correction option is selected in the Back Volume Correction menu for two Lumped Speaker Boundaries.
在 6.2 版本以及更高的版本中,使用 无校正 选项,将校正阻抗设为零。
The No correction option is selected in the Back Volume Correction menu for two Lumped Speaker Boundaries.
在 6.2 版本以及更高的版本中,使用 无校正 选项,将校正阻抗设为零。
然后,在 电路 接口中,应添加两个串联的 外部 I vs. U 节点,如下图所示。本文随附模型(lumped_loudspeaker_driver_solid_diaphragm_62.mph)的组件 2 中演示了这一版本的设置。
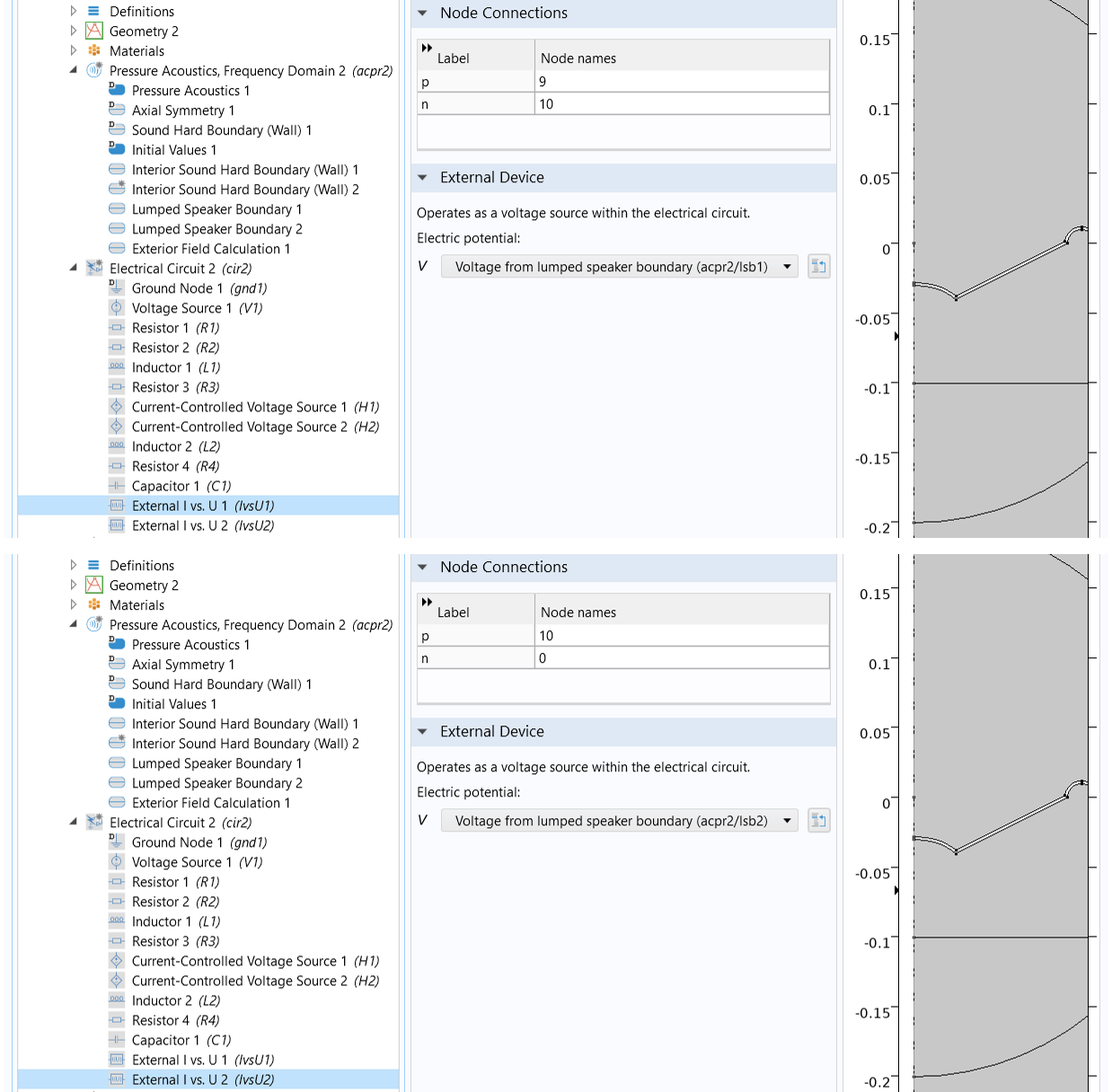 A comparison of the Settings windows for the two External I vs. U nodes.
振膜采用实体建模时的电路-有限元耦合设置。
A comparison of the Settings windows for the two External I vs. U nodes.
振膜采用实体建模时的电路-有限元耦合设置。
在瞬态非线性分析中使用集总扬声器边界特征
在时域模型中也可使用 总扬声器边界 征,并加入大信号参数,在简化的扬声器分析中模拟某些集总部件的非线性(大信号)行为。下列教程中对这些功能的使用进行了演示:
在这些教程中,机械和电气系统使用了 总扬声器边界 能与等效电路的内置耦合。
让我们来看第一个例子,其中的模型定义与我们在上一节讨论的使用 Thiele-Small 参数进行频域分析的模型定义类似。现在我们引入几个大信号参数,并求解一个瞬态模型,以捕获振膜发生大偏移时引起的非线性效应。大信号声顺  和力因子
和力因子  是振膜轴向位置的非线性函数,而机械阻尼
是振膜轴向位置的非线性函数,而机械阻尼  是其轴向速度的函数。这些函数被定义为插值数据,其时间依赖性来自随时间变化的
是其轴向速度的函数。这些函数被定义为插值数据,其时间依赖性来自随时间变化的  和
和  。振膜的
。振膜的  向位置经计算后存储在预定义的全局变量 actd.ilsb1.x_ax,其轴向速度 通过预定义的全局变量 actd.ilsb1.v_ax 获得。
向位置经计算后存储在预定义的全局变量 actd.ilsb1.x_ax,其轴向速度 通过预定义的全局变量 actd.ilsb1.v_ax 获得。
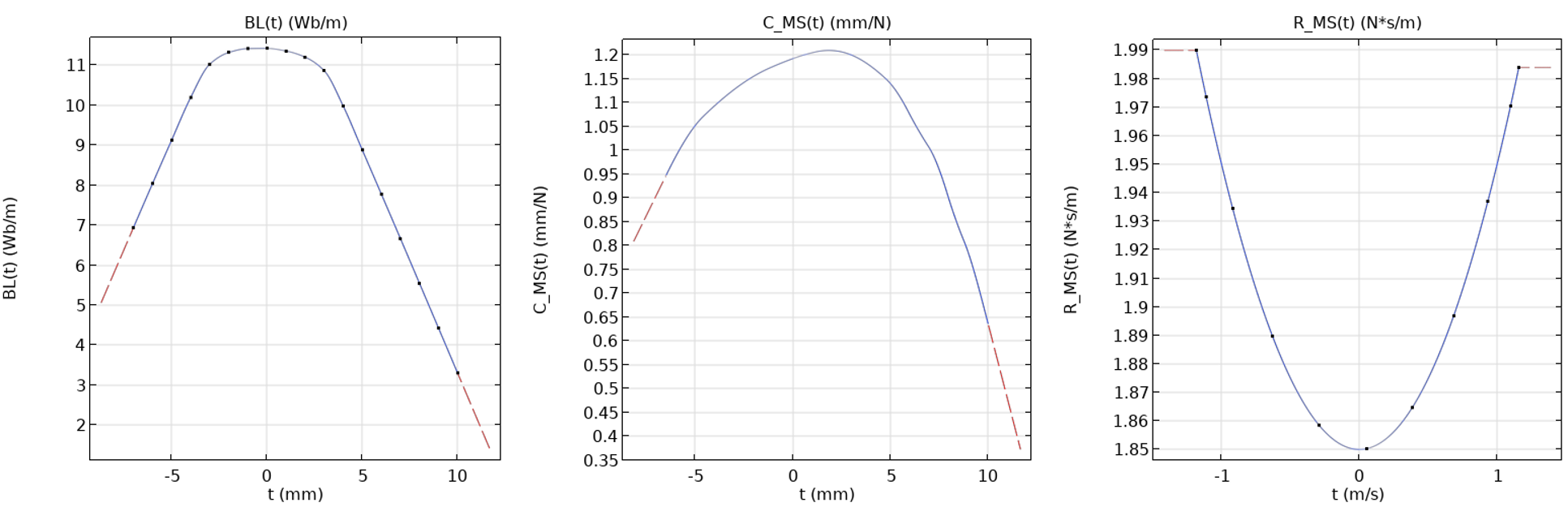 Three 2D plots of signal compliance, force factor, and mechanical damping.
Three 2D plots of signal compliance, force factor, and mechanical damping.插值函数图显示了力因子 BL 和声顺性 C_MS 与振膜轴向位置(左图和中图),以及机械阻尼 R_MS 与振膜轴向速度的关系(右图)。
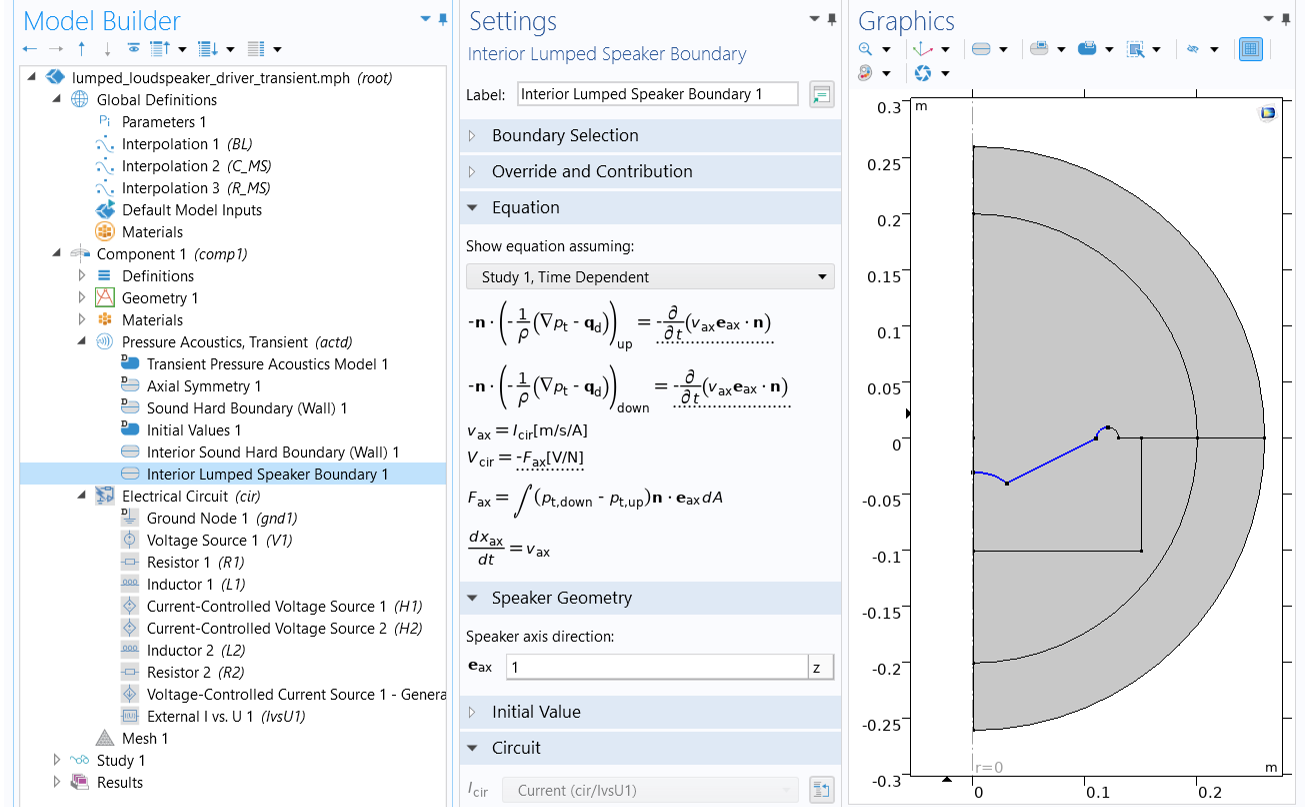 A Settings window showing the equations for an Interior Lumped Speaker Boundary.
A Settings window showing the equations for an Interior Lumped Speaker Boundary.瞬态 集总扬声器边界 特征计算振膜的轴向位置和轴向速度变量。
 Four Settings windows for H1, H2, R2, and G1 showing the equations used to define the large-signal parameters.
Four Settings windows for H1, H2, R2, and G1 showing the equations used to define the large-signal parameters.计算得出的轴向位置和轴向速度用于定义电路模型中的大信号参数。
请注意,在频域中,力的柔顺性仅由机械电路中的电容器表示。在时域中,电容器不足以描述瞬态电容(其时间相关性通过  表示)的效果,因为内置电容器使用的是
表示)的效果,因为内置电容器使用的是  关系,其中不包括
关系,其中不包括  的时间导数贡献。解决方法是使用具有
的时间导数贡献。解决方法是使用具有  电流-电压关系的 电压控制的电流源 器件,以获得完整的时间导数,其电压存储在名为 sens.v 的内部变量中,可用于定义正确的电流电压关系。
电流-电压关系的 电压控制的电流源 器件,以获得完整的时间导数,其电压存储在名为 sens.v 的内部变量中,可用于定义正确的电流电压关系。
与柔顺性和力因子相关的非线性效应在较低频率时尤为重要,这也是集总建模方法的主要应用领域。下图显示了在扬声器前方 20 cm 处评估信号非线性周期部分的频谱,扬声器由 50 Hz 电压源驱动。该输入信号可用于评估总谐波失真(THD),且可以修改为任何所需的信号,例如,用于评估互调失真(IMD)。
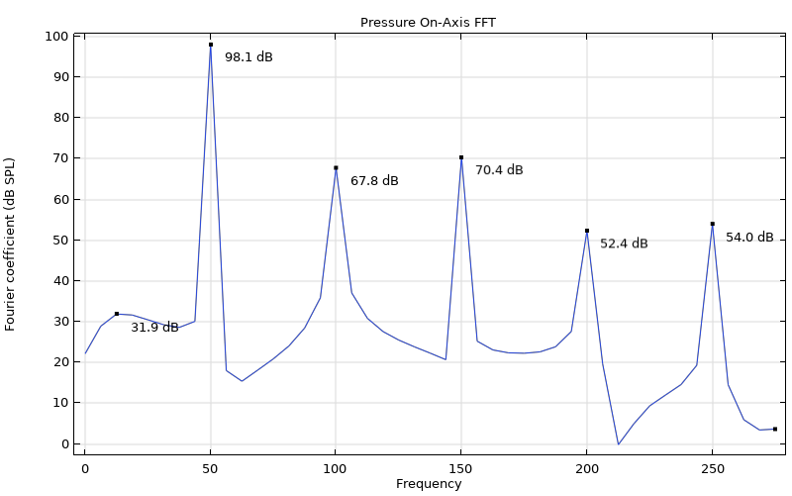
在由 50 Hz 电压源驱动的扬声器前方 20 cm 处评估的声音信号频谱,数字显示的是所产生谐波的峰值。
使用集总机械系统模型
在此,我们将讨论另一种将机械部件组合在一起的方案。虽然使用等效阻抗的电路表示法(如上所述)很常用,但有些用户可能更喜欢使用移动类比法的集总机械电路。在这种情况下,您可以使用 集总机械系统 接口,用质量、弹簧和阻尼器等集总组件对机械系统中的位移和力进行建模,同时为电气系统保留一个电路模型。“使用集总机械系统的扬声器驱动器集总模型”教程案例中对此进行了演示。如下图所示,该教程使用了相同的电路模型来表示电气元件(右上),但使用质量-弹簧-阻尼器系统来表示驱动器的机械性能(右下)。
虚线框内(左侧)的扬声器驱动器部件由一个集总电路(右上角)和一个集总机械系统(右下)分别模拟其电气特性和机械性能。
机械系统由以下部分组成:
- 质量(),代表音圈和振膜组件的质量
- 弹簧(
 ),代表扬声器悬架系统(定心支架和外部悬架)的刚度
),代表扬声器悬架系统(定心支架和外部悬架)的刚度 - 阻尼(),代表悬架系统可能产生的损失
集总模型-有限元耦合
集总机械系统需要与有限元压力声学模型以及集总电气模型耦合,可通过以下三个步骤完成:
- 在 压力声学,频域 接口中添加 内部法向加速度,并使用在 集总机械系统 接口中计算的质量加速度来定义轴向加速度,如下图所示。变量 lms.M1_a 将 质量 1 M1(图中对应 )的加速度保存在 集总机械系统(lms) 接口中。
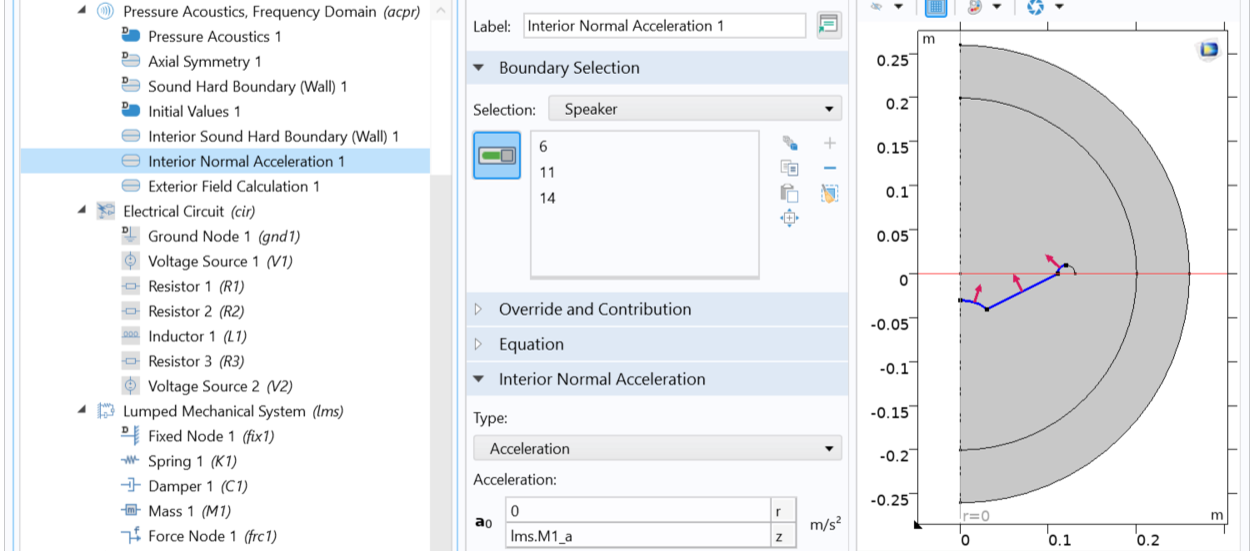 An Interior Normal Acceleration feature Settings window and a semicircular graphic with red arrows tangent to the blue interior boundaries.
An Interior Normal Acceleration feature Settings window and a semicircular graphic with red arrows tangent to the blue interior boundaries.集总机械系统的质量加速度被传递给压力声学模型,以进行声辐射。
- 在 电路 接口中添加 电压源 节点,并使用 BL*lms.M1_v 来定义电压,其中的变量 lms.M1_v 保存了 集总机械系统 接口中 质量 1 的速度。该电压源对应于集总电路图中的 ,代表线圈运动产生的反向感应电压。
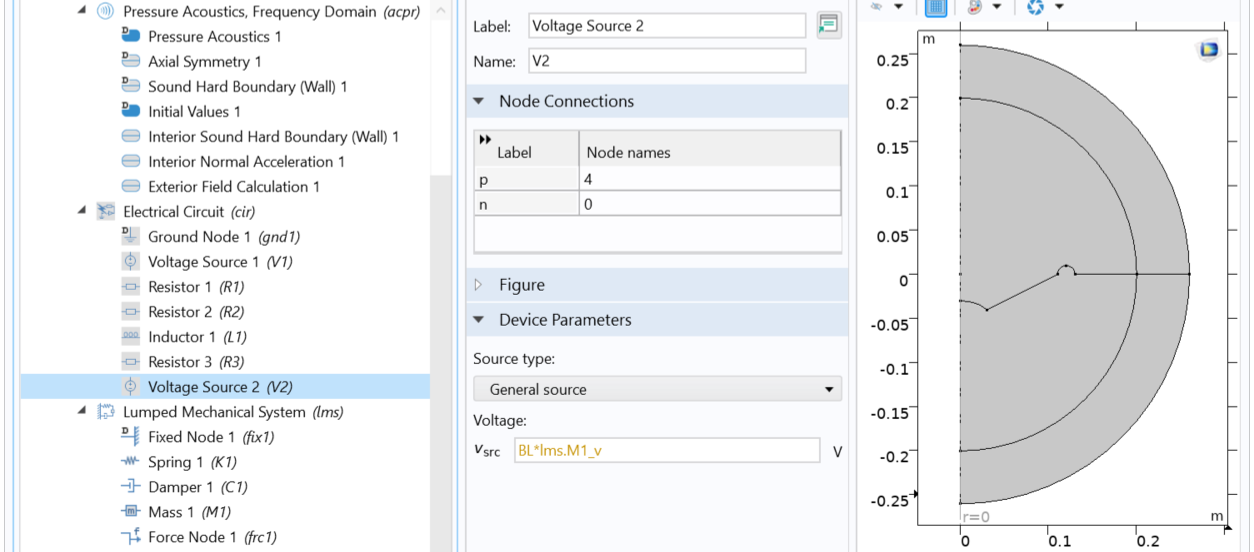 A Voltage Source feature Settings window with voltage defined by an equation and a gray semicircular graphic.
集总机械系统 接口的质量加速度被传递到 电路 接口,以包含反电动势。
A Voltage Source feature Settings window with voltage defined by an equation and a gray semicircular graphic.
集总机械系统 接口的质量加速度被传递到 电路 接口,以包含反电动势。
- 在 集总机械系统 接口中添加一个 力 节点,以包含作用在轴向的洛伦兹力 BL*cir.R2_i 和压力 F_D。变量 cir.R2_i 保存了 电路(cir) 接口中 电阻器 2 节点 R2 的线圈电流,F_D 则是 模型变量 节点中手动定义的轴向压力(下图)。
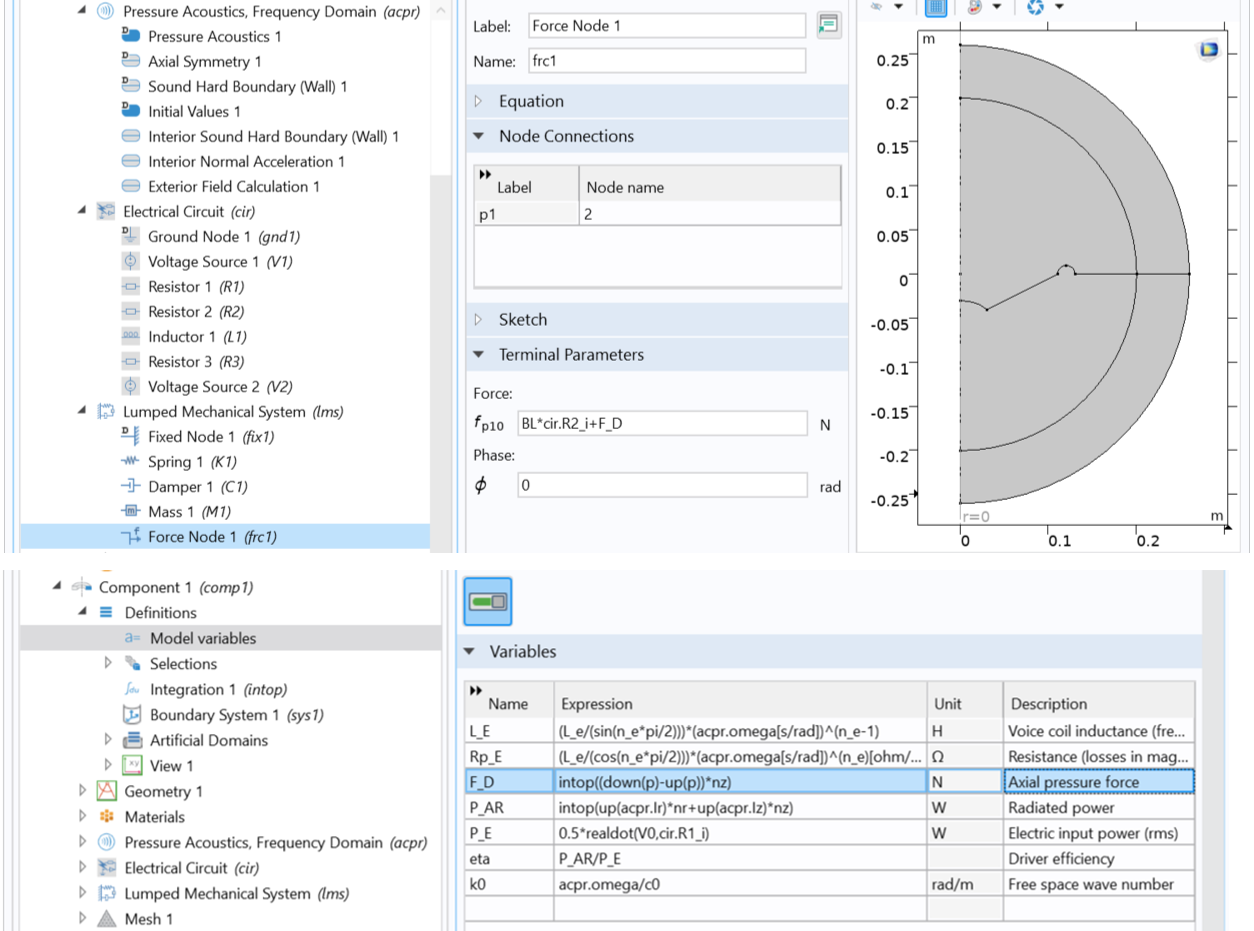 A Force Node feature Settings window with the force defined by an equation and a table of variables with F_D highlighted.
电路模型中的线圈电流和压力声学模型中振膜上的压降都被传递到集总机械系统中,用于计算机械系统所受的总力。
A Force Node feature Settings window with the force defined by an equation and a table of variables with F_D highlighted.
电路模型中的线圈电流和压力声学模型中振膜上的压降都被传递到集总机械系统中,用于计算机械系统所受的总力。
进阶学习
有关集总电路和集总机械模型的练习,请从 COMSOL 案例库下载以下文档和 MPH 文件:
请提交与此页面相关的反馈,或点击此处联系技术支持。