使用偏微分方程(PDE)接口建模:低维度常微分方程和微分代数方程接口
在 COMSOL Multiphysics® 中使用偏微分方程(PDE)建模系列课程的第 5 部分(共 11 部分),您将学习如何使用接口来指定边界和边上的偏微分方程。您还将看到许多系数为零的偏微分方程的一些非常重要的简并情况,并学习如何使用分布式常微分方程(ODE)、微分代数方程(DAE)和代数方程进行建模。
目录
- 用于低维度建模的偏微分方程接口
- 系数形式边界偏微分方程
- 钢罐中的电流
- 耦合不同维度的偏微分方程
- 分布式常微分方程和微分代数方程建模
- 分布式代数方程建模
- 分布式常微分方程和微分代数方程的场连续性
- 进阶学习
用于低维度建模的偏微分方程接口
许多物理过程都发生在金属壳或导电膜等薄结构中。使用直接方法对这些薄结构进行建模,即用 CAD 模型和有限元网格来表示结构(包括其厚度),可能具有挑战性,因为结构的大长宽比会导致网格和几何分析方面的数值问题。所以,通常将薄结构简化为壳体,而不对其几何厚度进行建模。在这种情况下,可以将厚度视为一种物理属性,并在方程中表示为一种在结构的边界上实现的材料属性。接下来,我们将通过一个示例模型,为您介绍如何使用 系数形式边界偏微分方程 接口求解三维曲面壳体的偏微分方程。
正如本系列课程的前几部分所述,软件中内置了许多易于使用的预定义物理场接口,用于对各种类型的壳体建模。例如,在 AC/DC 模块中,有预定义的 壳内电流 和 多层壳中的电流 接口,如下图所示。
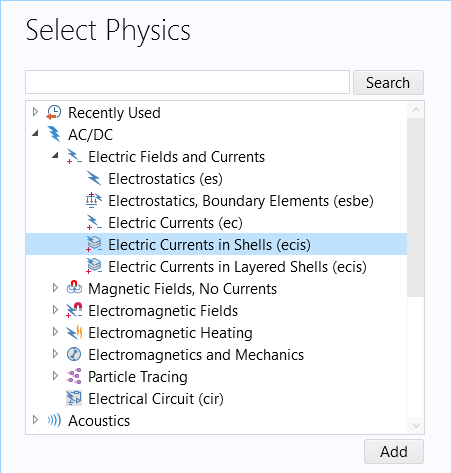
AC/DC模块中的 壳内电流 物理场接口。
为了便于教学,我们将演示如何使用 系数形式偏微分方程 接口实现 壳内电流 接口。如下图所示,在模型向导的 选择物理场 页面中,数学 分支下的相应分支中内置了 低维 接口。
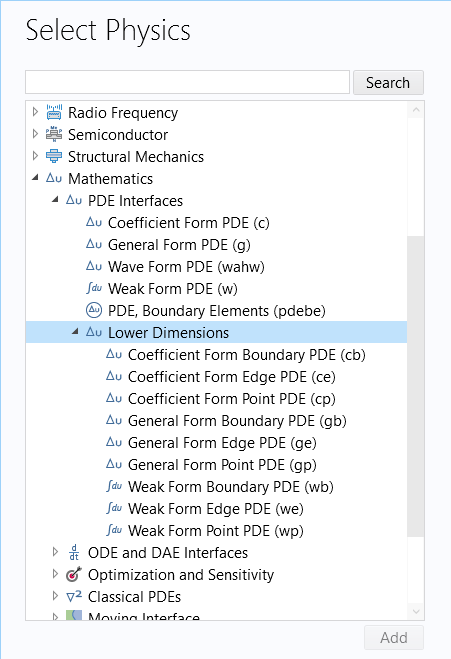
低维的偏微分方程建模接口。
请注意,您不仅可以在边界上定义低维方程,还可以在边和点上定义低维方程。在考虑低维度的偏微分方程接口时,不要将 系数形式边界偏微分方程 接口与 偏微分方程,边界元 接口混淆。系数形式边界偏微分方程 是基于有限元方法的低维(边界),而 偏微分方程,边界元 接口是基于边界元方法,不适用于低维度方程。
系数形式边界偏微分方程
系数形式边界偏微分方程 在外观上与为域定义的 系数形式偏微分方程 非常相似:

包含诺伊曼边界条件:

和狄利克雷条件:

在二维空间中,矢量  是边界曲线的切线矢量。在三维空间中,矢量 同时垂直于表面法线和边切线矢量。
是边界曲线的切线矢量。在三维空间中,矢量 同时垂直于表面法线和边切线矢量。
不同之处在于,在 系数形式边界偏微分方程 接口中,散度和梯度是根据边界上的切向导数定义的。此外,在三维中,边界条件现在是定义在曲线或边上,而不是在表面上。在二维中,边界是点。
为了直观地理解切向导数的散度和梯度算子,可考虑一个三维边界面上的任意矢量  , 如下图所示。
, 如下图所示。
三维表面上的通用矢量。
我们可以通过减去表面法线分量  ,得到其在表面切线方向上的投影
,得到其在表面切线方向上的投影  。
。
的法线分量是它在表面单位法线  上的投影:
上的投影:

切向分量 为:

使用矩阵-矢量符号,我们还可以将其写成

其中,下标  是切向分量,上标 是矩阵转置,
是切向分量,上标 是矩阵转置,  是单位矩阵。
是单位矩阵。
下图显示了一个包含三个矢量的示例: , , and .
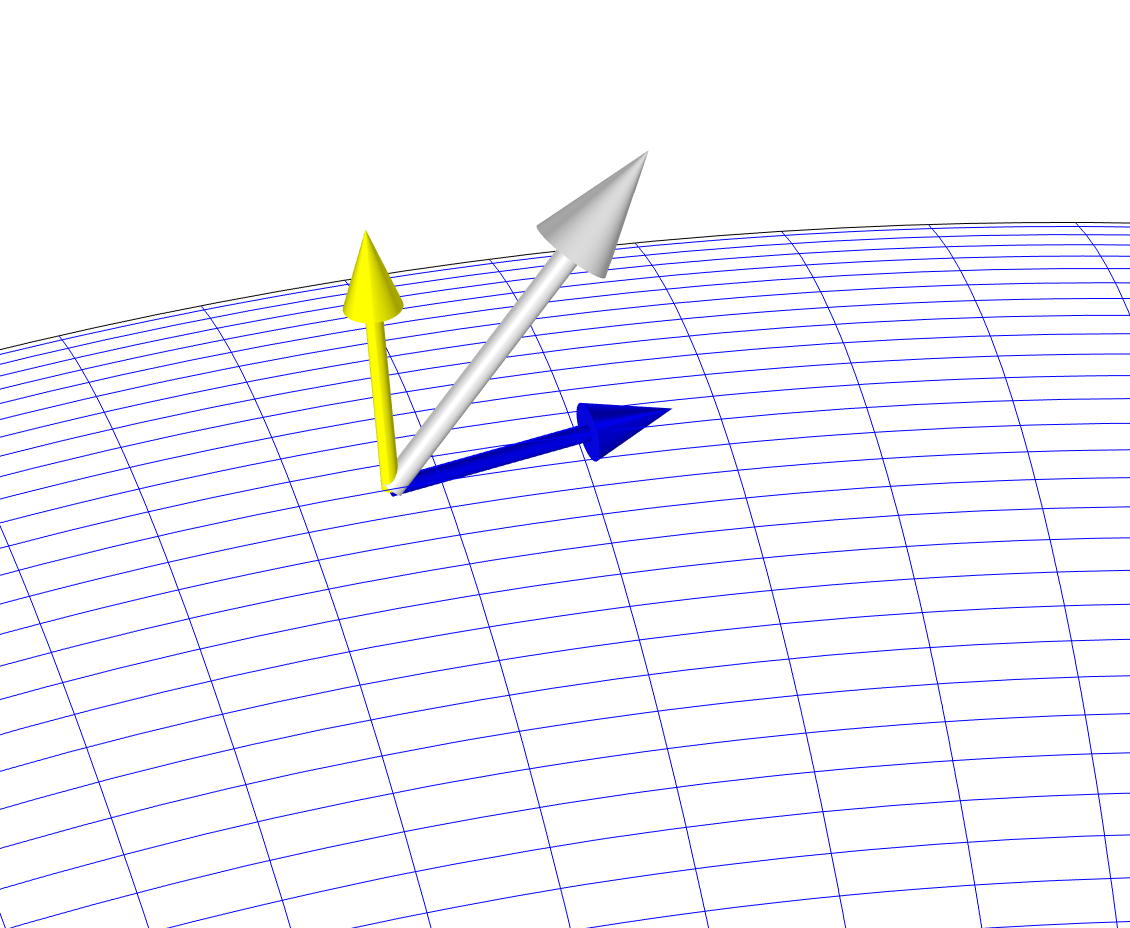 A surface with three 3D vectors that appear as yellow, gray, and blue arrows pointing outward in different directions.
A surface with three 3D vectors that appear as yellow, gray, and blue arrows pointing outward in different directions.
向量 (灰色), (黄色),和 (蓝色)。
同样的方法,我们可以得到变量  的梯度的切向分量:
的梯度的切向分量:

同样,矢量  的散度为:
的散度为:

式中,我们假设场在曲面内部及外部两侧都有定义,因此在计算导数时不会遇到任何问题。如果场只定义在曲面内部,广义公式仍然适用。
这就是 系数形式边界偏微分方程 接口中使用的梯度和散度算子的形式。例如,通过用切向导数表示偏微分方程,我们可以描述表面切向方向上发生的对流-扩散-反应过程。这一过程的一个示例为金属薄壳中的电流传导,另一个重要的例子是带有吸附和表面扩散的表面化学。
钢罐中的电流
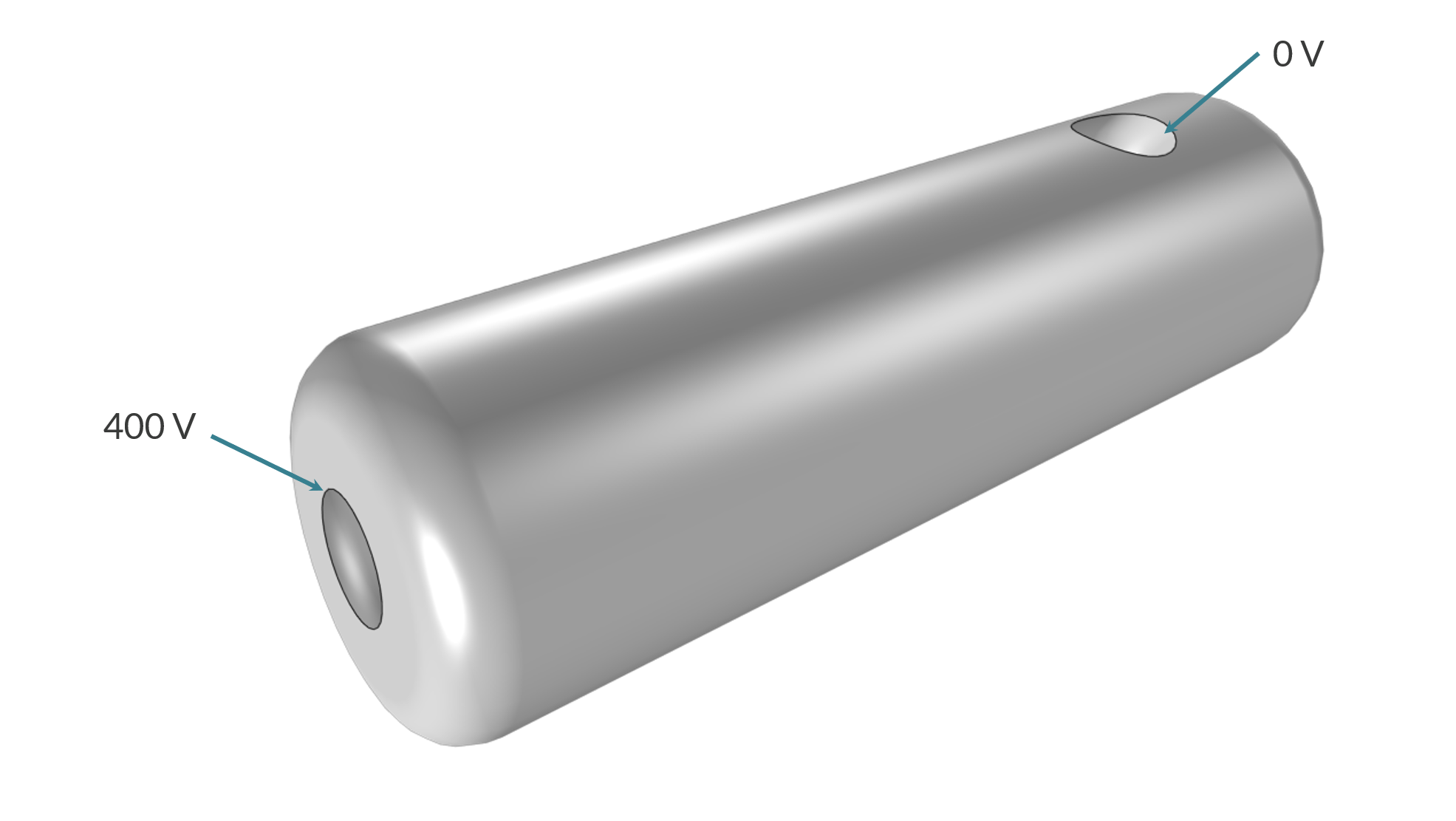
在本例中,我们将分析一个钢罐中的电流。如下图所示,钢罐有两个管道连接。其中一个接地,另一个连接到电流源,使用 400 V 的固定电压条件。模型中计算了罐壳内的电流密度以及表面的电位分布。
 A steel tank model with 400 V and 0 V labeled.
钢罐模型设置。
A steel tank model with 400 V and 0 V labeled.
钢罐模型设置。
壳内稳态电流方程为

其中,  是电势,
是电势, 是钢的导电率,
是钢的导电率,  是钢罐的厚度, 这一额外系数表示几何厚度在偏微分方程中的表示方式,而不是 CAD 模型中实际表示的真实厚度。在这种情况下,CAD 模型没有厚度,而只是一个表面。
是钢罐的厚度, 这一额外系数表示几何厚度在偏微分方程中的表示方式,而不是 CAD 模型中实际表示的真实厚度。在这种情况下,CAD 模型没有厚度,而只是一个表面。
在这个模型中,电导率和厚度参数被定义为全局参数,如下图所示。
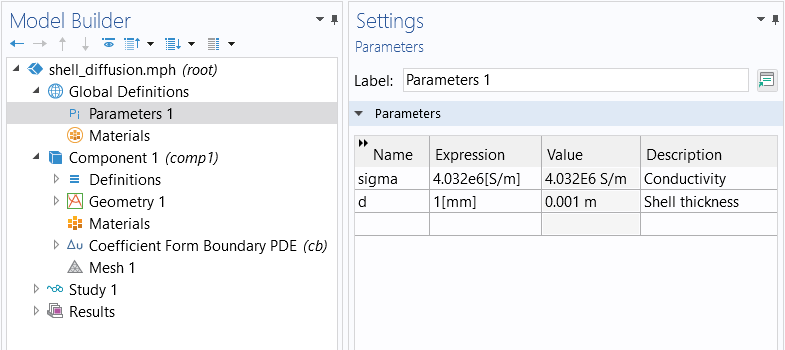
导电率和外壳厚度的全局参数。
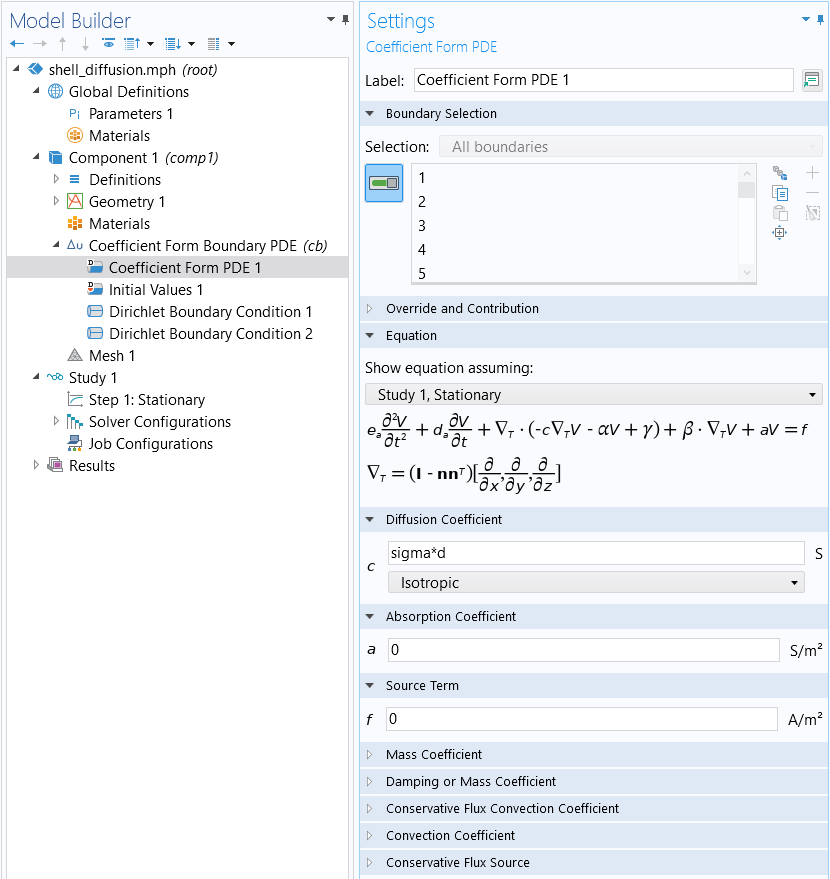
如果我们将方程
与 系数形式边界偏微分方程 的稳态方程进行比较:

将看到

而所有其他系数均为零。下图显示了 系数形式边界偏微分方程 接口中的这些设置:
边界条件定义在两组相连的边上,如下图所示。
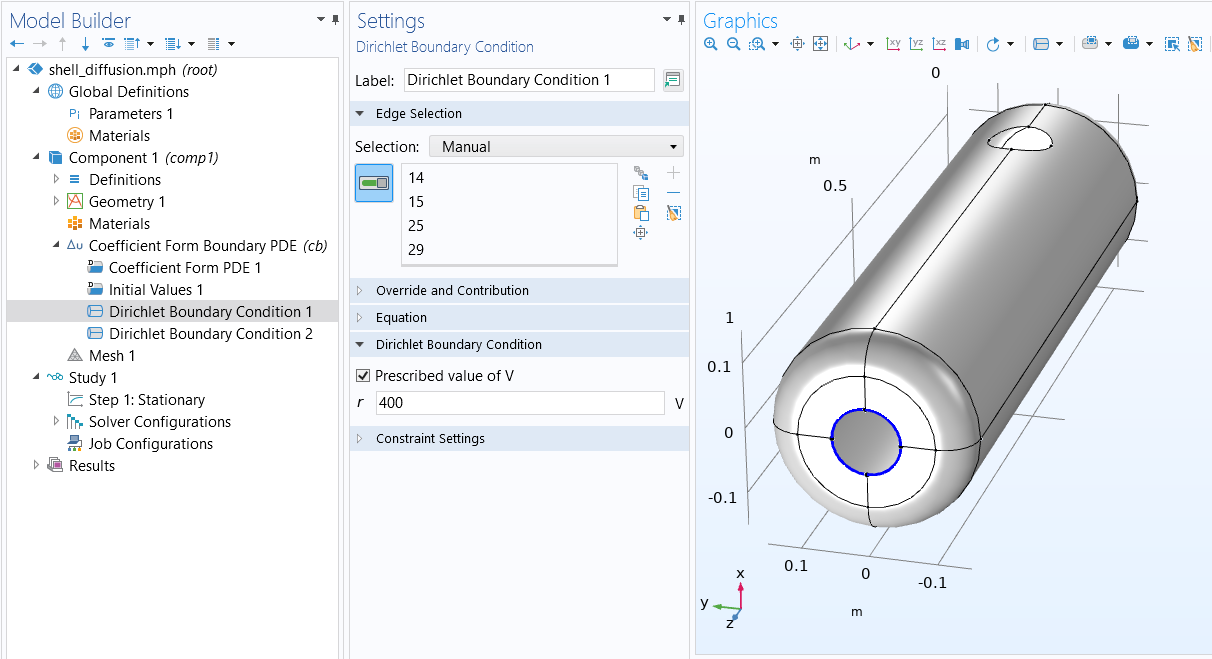 The Model Builder with Dirichlet Boundary Condition 1 selected, the corresponding Settings window with 400 V set, and the steel tank model in the Graphics window.
其中一个边界的 狄利克雷 条件,
The Model Builder with Dirichlet Boundary Condition 1 selected, the corresponding Settings window with 400 V set, and the steel tank model in the Graphics window.
其中一个边界的 狄利克雷 条件, 。
。
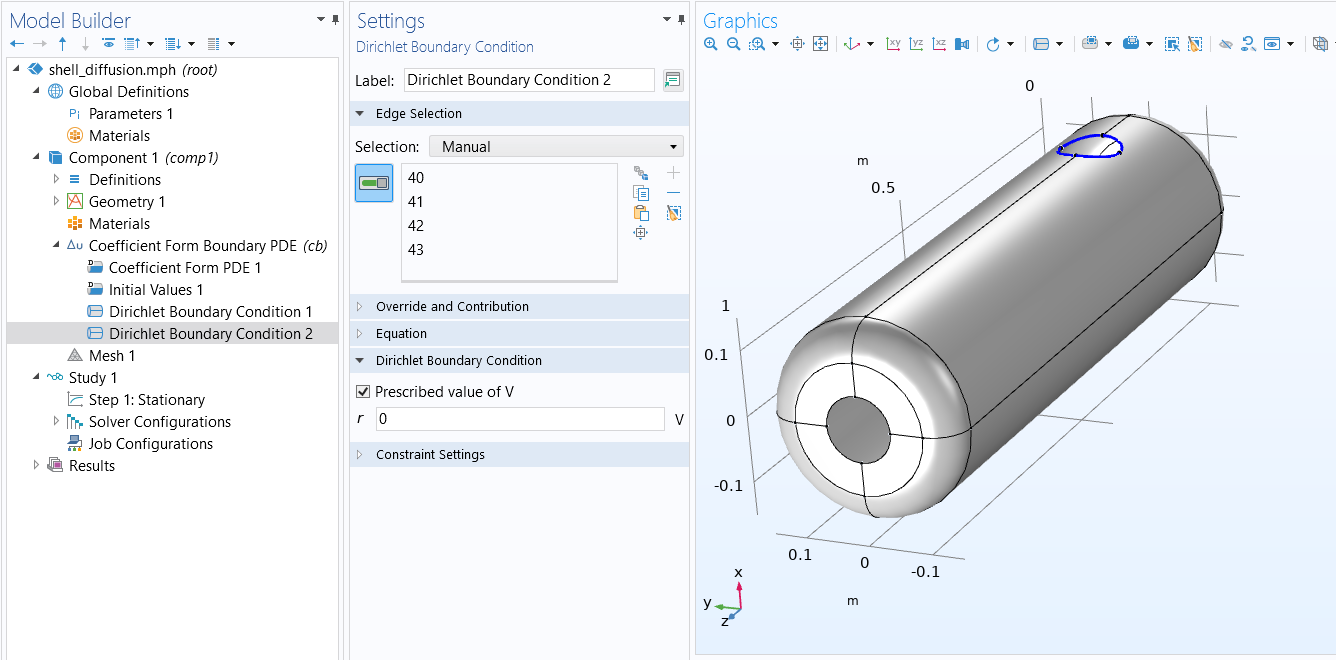 The Model Builder with Dirichlet Boundary Condition 2 selected, the corresponding Settings window with 0 V set, and the steel tank model in the Graphics window.
另一边界的 狄利克雷边界条件,
The Model Builder with Dirichlet Boundary Condition 2 selected, the corresponding Settings window with 0 V set, and the steel tank model in the Graphics window.
另一边界的 狄利克雷边界条件, ,或接地。
,或接地。
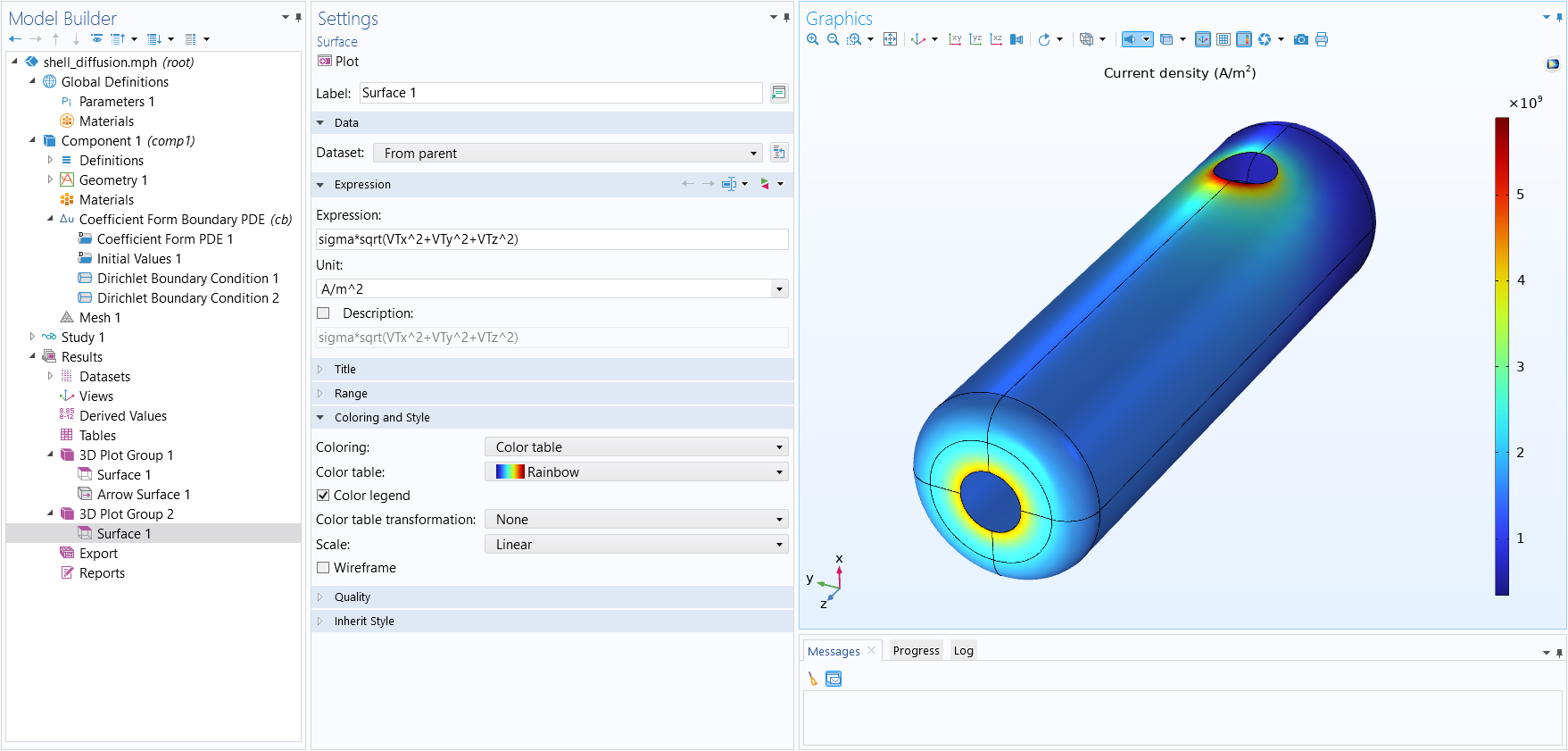
您可以绘制电势和电流密度等量,如下图所示。因变量 V 的各个梯度分量分别为 VTx, VTy, 和 VTz。
 The Model Builder with the Surface plot selected, the corresponding settings, and the Graphics window showing the steel tank model in the Rainbow color table, with most of the model being blue.
钢罐中电流密度的大小。
The Model Builder with the Surface plot selected, the corresponding settings, and the Graphics window showing the steel tank model in the Rainbow color table, with most of the model being blue.
钢罐中电流密度的大小。
您可以在 COMSOL 案例下载页面下载 钢罐示例模型 的模型文件。
耦合不同维度的偏微分方程
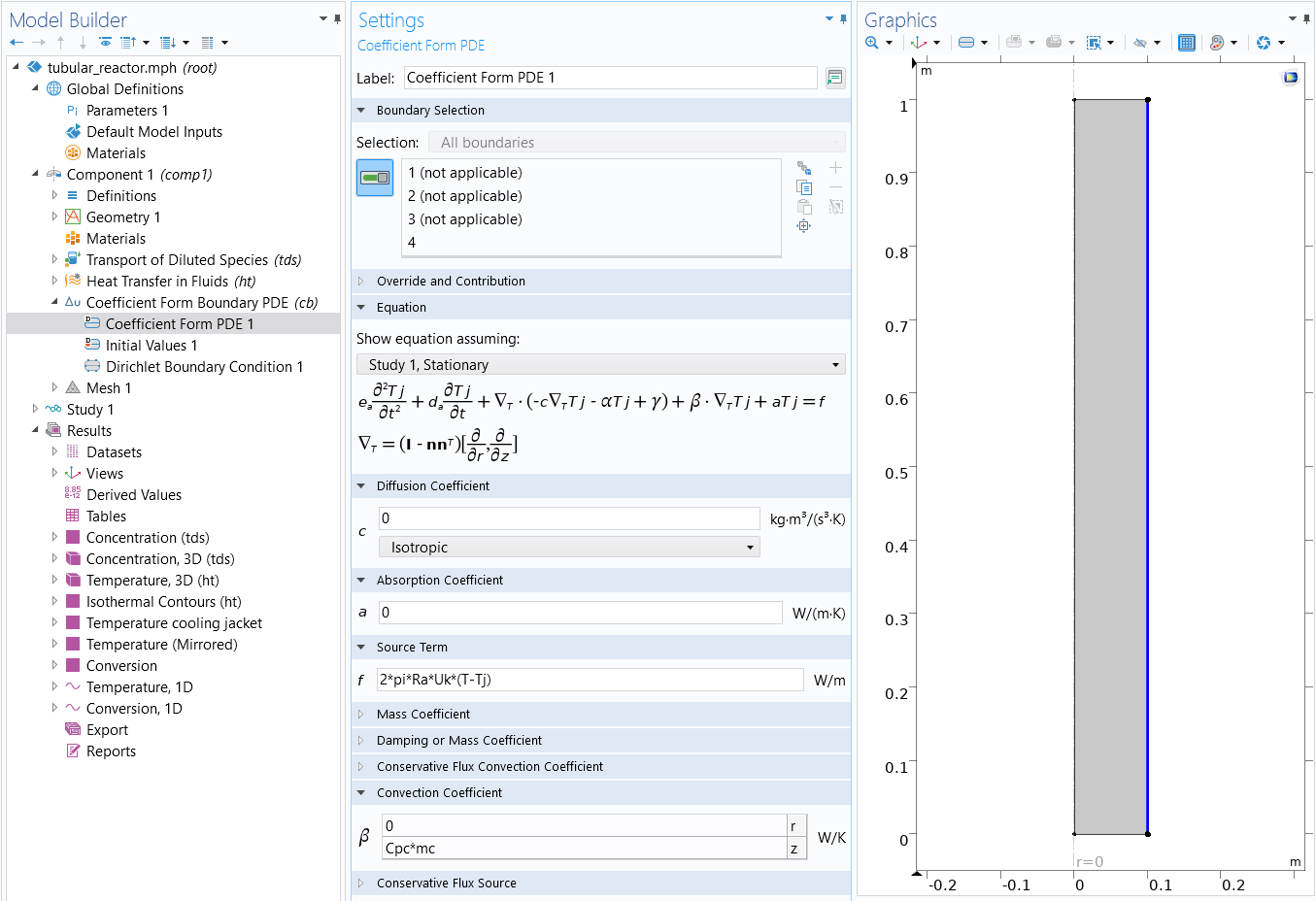
现在,我们再来看看本课程 第 4 部分 中示例的 管式反应器 教程模型,其中包括外部边界上的一个低维度偏微分方程。由于是二维模型,这个偏微分方程表示反应器的冷却套。在这个案例中,偏微分方程用于描述冷却剂的流动,是一个纯粹的对流模型。您可以在下图中看到相应 系数形式边界偏微分方程 接口的设置。
 The Model Builder with the Coefficient Form PDE interface selected, the corresponding settings, and the Graphics window showing the tubular reactor model.
管式反应器模型的 系数形式边界偏微分方程 接口。
The Model Builder with the Coefficient Form PDE interface selected, the corresponding settings, and the Graphics window showing the tubular reactor model.
管式反应器模型的 系数形式边界偏微分方程 接口。
在边界方程中,因变量为 Tj。同时,反应器主体域的因变量为 T。它们通过该边界 偏微分方程中的 源项 耦合,即 f 的表达式 2*pi*Ra*Uk*(T-Tj)。在 流体传热 接口方程的 热通量 定义中,也有一个相等但相反的项,通过边界通量 qa: -Uk*(T-Tj) 表达式来模拟域主体中的热量传递。
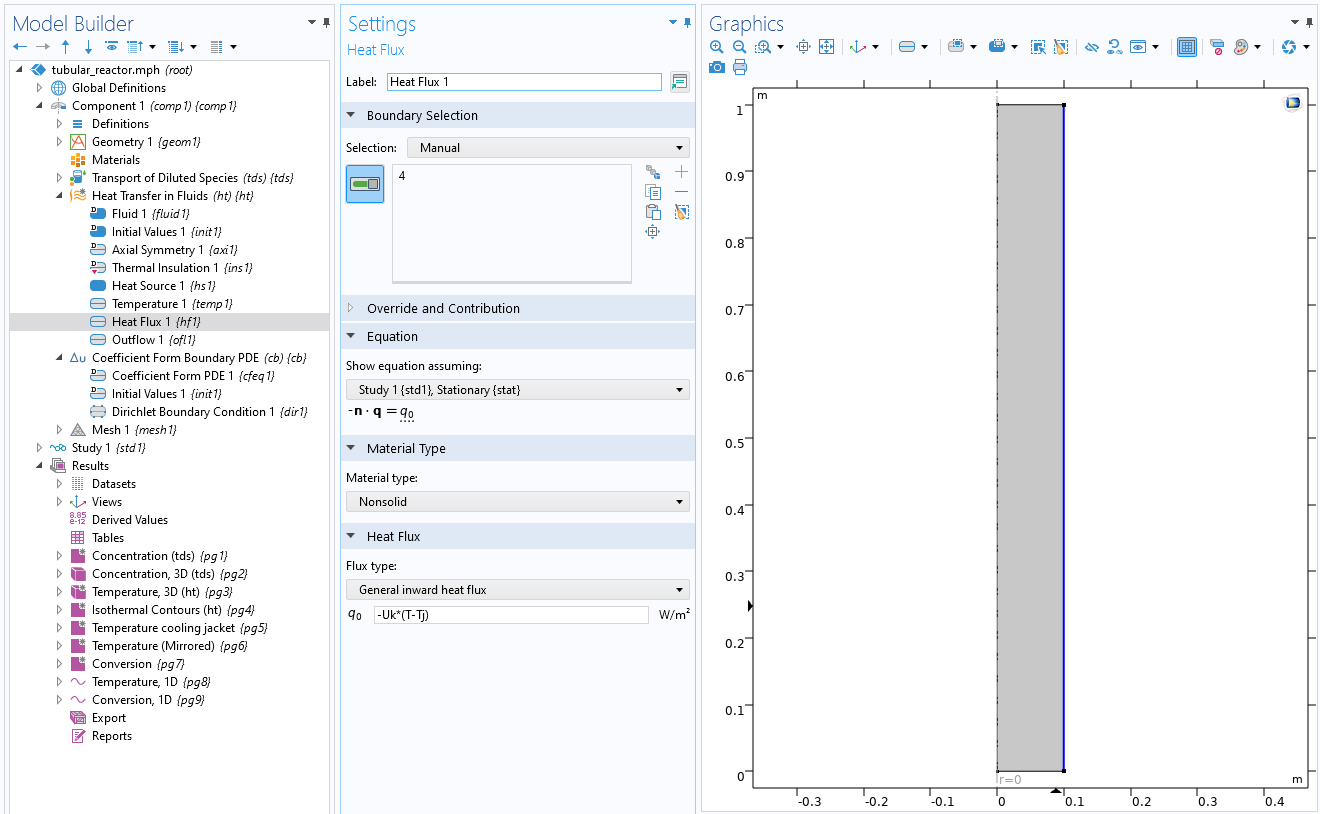 The Model Builder with Heat Flux selected, the corresponding Settings window, and the Graphics window showing the tubular reactor model.
连接 系数形式边界偏微分方程 与 流体传热 接口方程的热通量耦合。
The Model Builder with Heat Flux selected, the corresponding Settings window, and the Graphics window showing the tubular reactor model.
连接 系数形式边界偏微分方程 与 流体传热 接口方程的热通量耦合。
这就是一个如何将低维偏微分方程与相邻体域中的偏微分方程耦合起来的例子。使用 系数形式边界偏微分方程 符号,可以将边界偏微分方程写成

无扩散系数:

但是有一个源项:

其中,  是反应器的半径,
是反应器的半径,  是总传热系数。
是总传热系数。
对流部分是

其中  和
和  分别为冷却剂的热容和质量流量。
分别为冷却剂的热容和质量流量。
分布式常微分方程和微分代数方程建模
在管式反应器的例子中,边界方程存在对流,但没有扩散。我们可能也会遇到既没有扩散也没有对流的情况,这些情况通常发生在瞬态方程中。回到 系数形式边界偏微分方程 :
也许最简单的情况是,

且其他系数均设为零。
由于所有空间导数项都为零,因此这类方程在空间方向上没有任何信息传输。相反,空间中的每一点都定义了自己的常微分方程。这类方程有时被称为 分布式常微分方程 或 分布式状态方程。例如,它可能表示某种动态材料属性,其值只取决于材料之前的状态,而不取决于相邻点。这类方程非常重要,因此在模型向导中 常微分方程 和 微分代数方程 接口下有专门的接口,如下图所示。
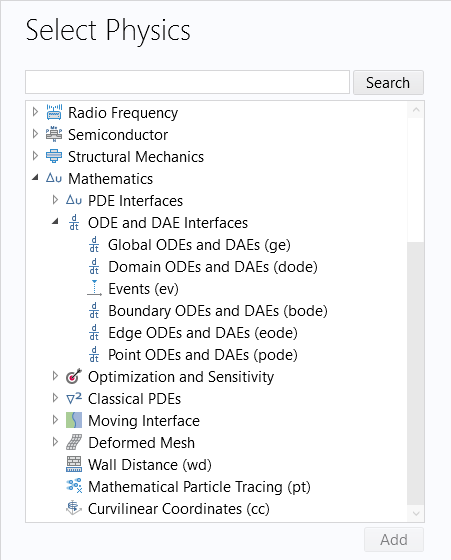
选择物理场 窗口,显示了 常微分方程 和 微分代数方程 接口下的可用选项。
当然,您也可以在两个因变量 ( 和  ),中建立分布式常微分方程系统,例如:
),中建立分布式常微分方程系统,例如:


您可以使用 域常微分方程 和 微分代数方程 接口来定义这类系统。
现在,如果  ,那么最后一个方程实际上不是一个常微分方程,而是一个代数方程。我们就得到了方程组:
,那么最后一个方程实际上不是一个常微分方程,而是一个代数方程。我们就得到了方程组:

这就是 微分代数方程系统。它出现在许多不同的应用领域,COMSOL Multiphysics® 可用于求解许多不同情况下的这类微分代数方程。几乎所有的 数学 接口都可用于定义和求解此类系统。
在这种情况下,一个重要的微分代数方程变体例子就是瞬态焦耳热:


其中  和其他材料特性可以是温度和其他场变量的函数。
和其他材料特性可以是温度和其他场变量的函数。
我们可以看到,第一个方程中没有时间导数,表示稳态电流守恒方程。对于此类方程,COMSOL Multiphysics® 使用了所谓的 线性方法 来求解微分代数方程系统。设置求解器的第一步是将偏微分方程系统转换为代数方程系统,然后指定能够处理代数方程系统的专用求解器。
分布式代数方程建模
当所有导数的系数都为零时,我们可能会遇到微分代数方程系统的另一种简并情况,例如:

这是一个纯粹的代数关系,就像偏微分方程一样,几乎所有的 数学 接口都可以用来定义和求解这样的系统。能否求解取决于是否存在解,诸如此类的问题,与前述内容一样。请注意,这里的因变量 和 是场量,因此它们可以在整个空间中变化。根据系数和源项的内容,系统可能具有非线性。更多信息和代数方程求解示例,请参阅 COMSOL 博客:求解代数场方程。
分布式常微分方程和微分代数方程的场连续性
在求解分布式常微分方程和微分代数方程(包括分布式代数方程)时,方程是在形函数的平均意义进行求解。在这种情况下,由于没有空间导数将相邻形函数中的场连接在一起,因此我们可以通过选择不同的形函数来控制场的连续性水平。域常微分方程和微分代数方程 接口的默认设置是二阶连续或间断拉格朗日形函数,后者的形函数允许场变量在单元之间不连续。下面的结果图显示了使用 域常微分方程和微分代数方程 接口的二阶间断拉格朗日形函数和二阶连续拉格朗日形函数求解的方程的解。前者在每个单元内用二阶多项式近似,但在单元之间有跳跃。后者也是在每个单元内用二阶多项式近似,但在单元之间会强制保持连续性。选择哪种方案取决于建模场的物理解释。
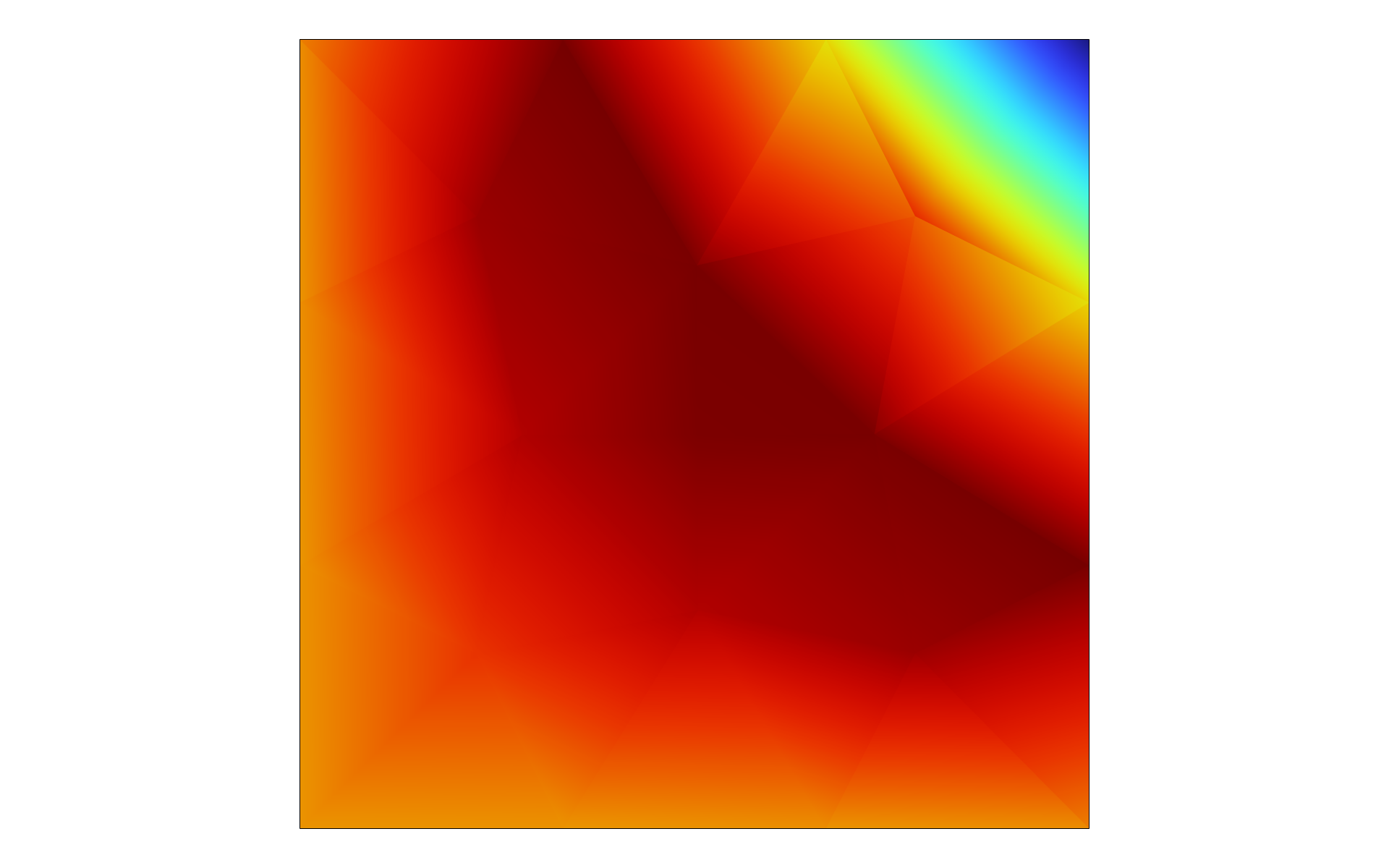
使用带有二阶间断拉格朗日形函数的 域常微分方程和微分代数方程 接口求解方程。为了更清晰地显示非连续跳跃,使用了非常粗的网格。
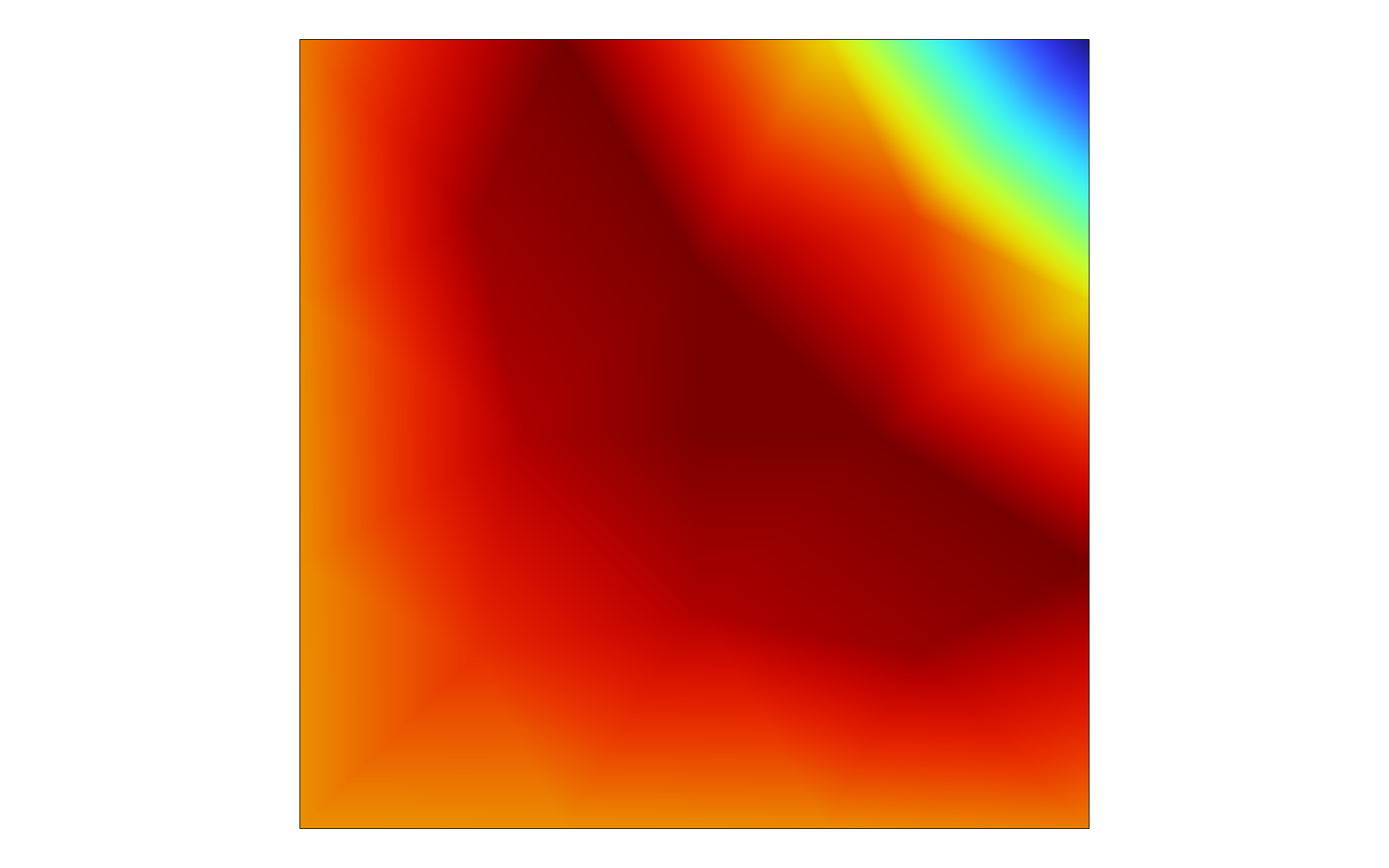
使用带有二阶连续拉格朗日形函数的 域常微分方程和微分代数方程 接口求解方程。
形函数还有许多其他有用的选择,例如高斯点形函数。这些形函数的重要特性是点与点之间完全独立,因此适用于求解局部隐式材料关系。在使用这些函数时,需要注意选择形函数的阶次,这样才能与其他物理方程的积分点模式相匹配,因为这些方程将使用 域常微分方程和微分代数方程 接口的求解方法。当点模式匹配时,高斯点形函数求解实际上会表现为在任何一对点之间完全不相关,只在高斯点处求值。有关数值积分和高斯点的更多信息,请参阅博客 数值积分和高斯点简介。
进阶学习
虽然本文中使用的模型可以下载,但我们鼓励您根据本文提供的指导自己建立模型,这将有助于您巩固学习如何在软件中使用 低维度 接口设置偏微分方程。然后,您可以打开示例模型的文件进行研究,并将其与使用预定义物理场接口实现的模型进行比较。
请提交与此页面相关的反馈,或点击此处联系技术支持。