使用偏微分方程(PDE)接口建模:扩散方程
本课程是使用偏微分方程(PDE)建模系列课程的第 2 部分。我们将详细介绍如何使用 系数形式偏微分方程 和 一般形式偏微分方程 接口对一般扩散方程进行建模,如泊松方程、拉普拉斯方程和热方程。对于常规的建模和仿真任务,您无需使用数学接口,只需要使用软件内置的物理场接口就可以轻松完成。不过,如果您想对基于方程构建的模型的各个方面进行低层控制,那么使用数学接口是一个不错的选择。
偏微分方程接口
COMSOL Multiphysics® 中的偏微分方程接口可用于指定线性和非线性偏微分方程,包括许多经典的偏微分方程:
- 拉普拉斯方程
- 泊松方程
- 对流扩散方程
- 波动方程
- 亥姆霍兹方程
- 热方程
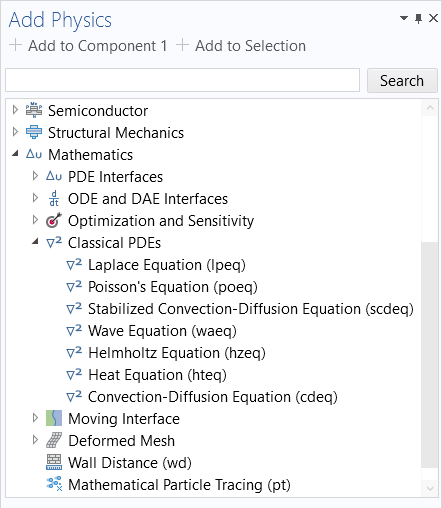
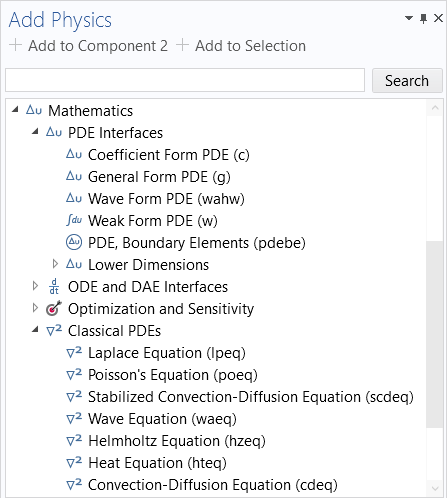
这些偏微分方程在物理中无处不在,并且都可以转换成包含时间和空间二阶导数的通用形式。如下图所示,在模型向导的 选择物理场 窗口中,您可以看到用于偏微分方程建模的选项。上面列出的经典偏微分方程均可在 经典偏微分方程 分支下找到。
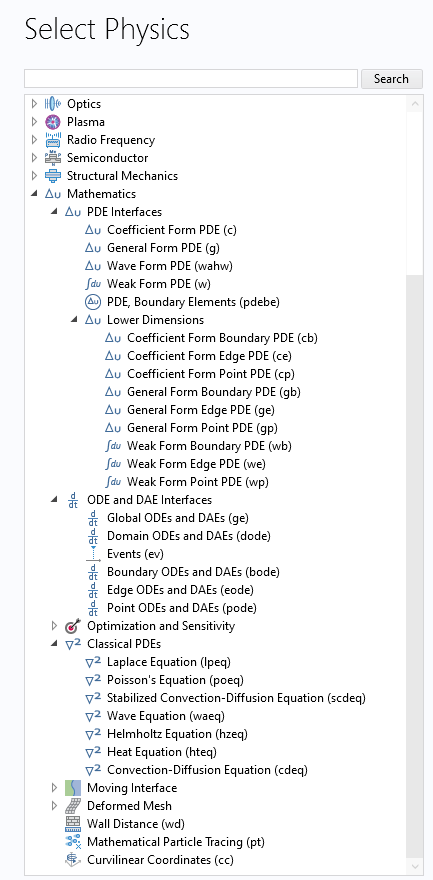
模型向导中用于偏微分方程建模的接口选项。
在 偏微分方程接口 列表中,您可以找到 波动偏微分方程 ,这是一个基于非连续 伽辽金法进行数值实验和仿真的接口。在本课程中,我们将不讨论 波动偏微分方程 或 经典偏微分方程 接口,而是介绍如何使用通用接口进行偏微分方程建模,包括 弱形式偏微分方程 接口,模型向导中的 低维 以及 常微分和微分代数方程 接口下的接口。
系数形式偏微分方程
COMSOL Multiphysics® 中最有用的基于方程建模的工具之一是 系数形式偏微分方程(我们将在本课程的其他部分详细介绍如何使用此接口)。在本课程的后续部分,我们还将学习 一般形式偏微分方程 接口。这两种方程形式,或称为方程模板,就它们所能表达的方程而言大致是相同的。它们还提供了可以指定不同阶次导数系数的建模功能,最高可达二阶。高于二阶的偏微分方程则可以使用偏微分方程系统建模,详见这篇文章。
我们先来回顾一下矢量微积分中关于标量场  , 和矢量场
, 和矢量场  的梯度和散度的一些符号:
的梯度和散度的一些符号:


因变量 的各向同性系数的系数形式偏微分方程可以表示为:

使用该接口时,有两个重要的边界条件。首先是广义 诺伊曼 边界条件:
 ,
,
用于模拟边界通量。第二种是 狄利克雷 边界条件:

用于在边界上为因变量指定固定值。
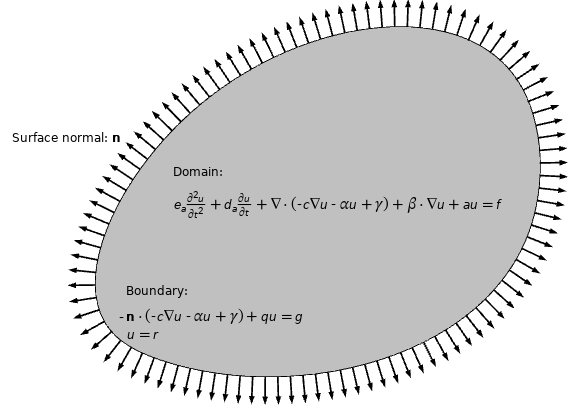
用于系数形式偏微分方程的含边界条件的偏微分方程。
如果系数形式偏微分方程中只有一个因变量,并且所有材料都是各向同性,那么除了以下系数总是矢量值外,大多数系数都是标量:
标量: 
矢量: 
请注意,在对各向异性材料建模时,一些标量系数会变成矢量或矩阵(张量)。
在下面的例子中,我们将看到如何使用 系数形式偏微分方程 通过匹配 系数 来定义一些经典偏微分方程。
如何定义随空间变化的系数或非线性方程?在 COMSOL Multiphysics® 中,可将方程系数定义为以下表达式:
- 空间坐标 x、y 和 z
- 时间变量 t
- 复值表达式,如
1+j*sqrt(5) - 因变量 (u, v, w,...)
- 因变量的导数:
ux,uy,uz,uxx,uxy, 等等 - 用户自定义函数和查找表
在使用内置物理接口时也是如此,即材料属性、源、载荷等也可以定义为表达式。
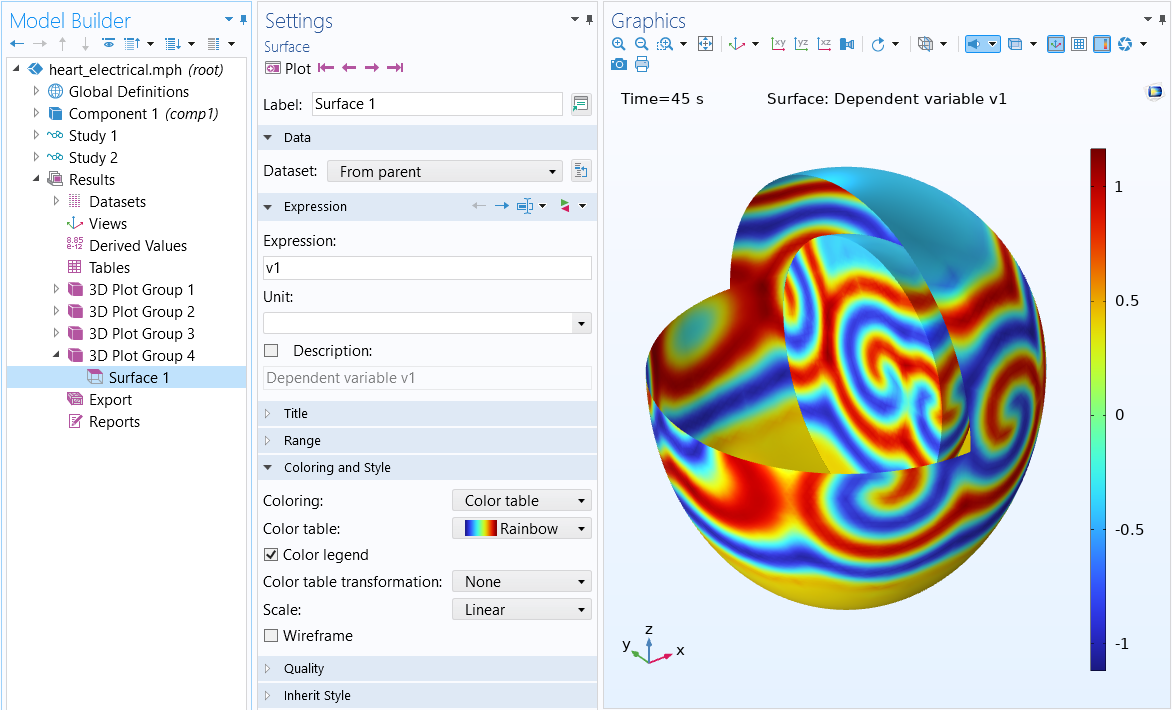 The COMSOL Multiphysics UI with Surface 1 selected in the Model Builder, the corresponding Settings window, and a model of electrical activity in cardiac tissue in the Graphics window.
The COMSOL Multiphysics UI with Surface 1 selected in the Model Builder, the corresponding Settings window, and a model of electrical activity in cardiac tissue in the Graphics window.使用 一般形式偏微分方程 数学接口对 心脏电信号 进行建模,其中使用了两个不同的瞬态非线性偏微分方程组:FitzHugh-Nagumo和 Ginzburg-Landau 方程。该模型由意大利罗马生物医学大学的 Simonetta Filippi 教授和 Christian Cherubini 博士提供。
偏微分方程系数的命名
系数形式偏微分方程 接口中不同项的名称受输运方程启发而得。
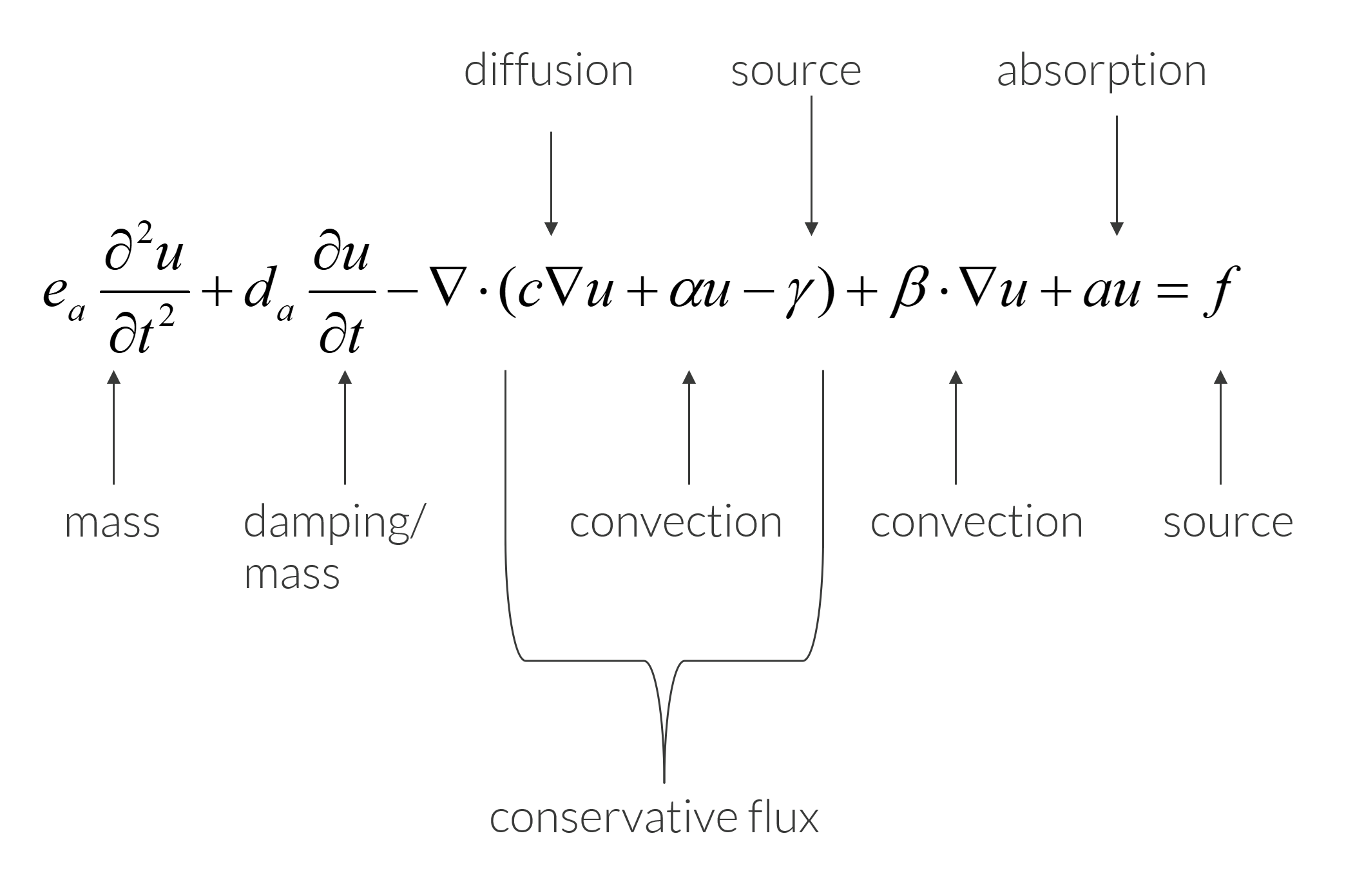
系数形式偏微分方程 中各种术语的约定。
本文将介绍一些不同的偏微分方程术语及其命名背景。
泊松方程
系数形式偏微分方程看起来很复杂,尤其是如果您以前从未见过这种形式。为了对其进行细分,我们先考虑它的稳态版本,即假设所有瞬态现象都已停止。换句话说,我们假设,

这表示忽略系数  和
和 
系数形式偏微分方程的稳态版本为:

为了进一步简化,我们假设:


现在,我们得出如下等式(将负号移到前面):

这是泊松方程的广义形式。根据符号约定, 对应源,
对应源,  对应汇。
对应汇。
如果设置  , 就会得到经典的泊松方程。
, 就会得到经典的泊松方程。

如果设置  , 就会得到拉普拉斯方程。
, 就会得到拉普拉斯方程。
有时,使用守恒源项  来模拟源会更方便。有关这方面的一些例子,您可以查看本文末尾的常用方程表。
来模拟源会更方便。有关这方面的一些例子,您可以查看本文末尾的常用方程表。
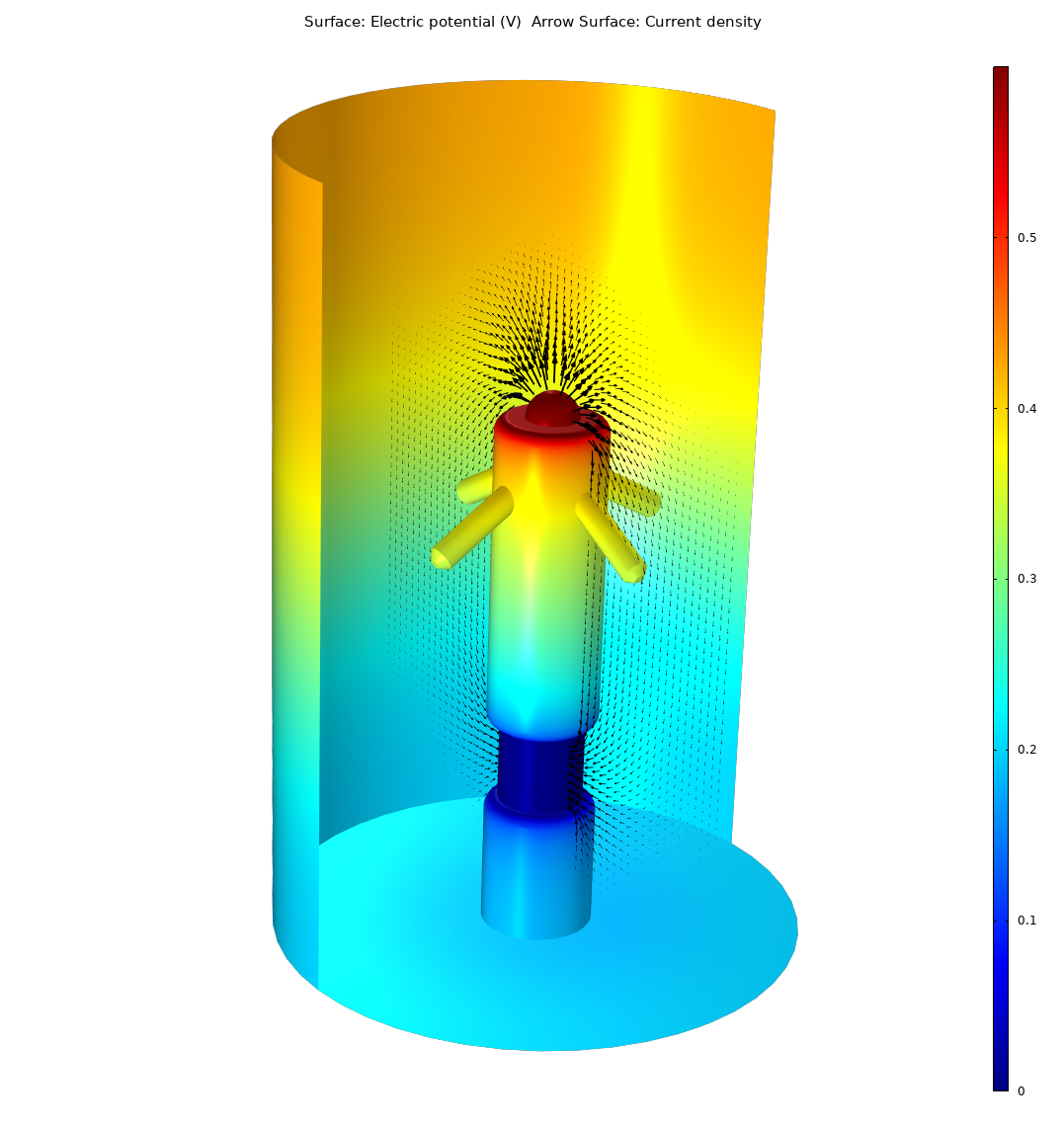 拉普拉斯方程是实际应用中最常见的多项式方程之一。在本示例中,拉普拉斯方程用于模拟 起搏器电极 周围生物组织中的电流守恒。可视化绘图显示了电势(颜色)和电流密度(箭头)。
拉普拉斯方程是实际应用中最常见的多项式方程之一。在本示例中,拉普拉斯方程用于模拟 起搏器电极 周围生物组织中的电流守恒。可视化绘图显示了电势(颜色)和电流密度(箭头)。
如前所述,在 系数形式偏微分方程 中确定系数的过程代表了如何将此方程模板用于实际建模任务:
- 首先考虑方程是稳态还是瞬态。
- 必要时,消除瞬态项。
- 进一步消除不必要的系数。
- 将您方程中的系数与 系数形式偏微分方程 中的系数进行匹配。
下图显示了选择稳态研究时 系数形式偏微分方程 标量版本的默认设置,其中的默认系数与泊松方程相对应。
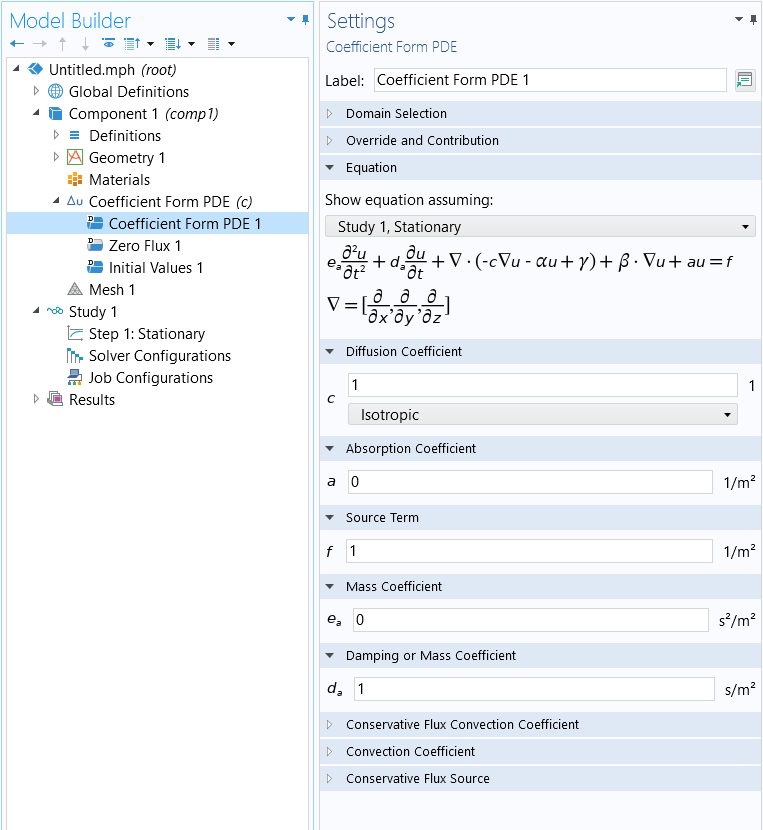
系数形式偏微分方程节点下的默认标量系数,与泊松方程相对应。
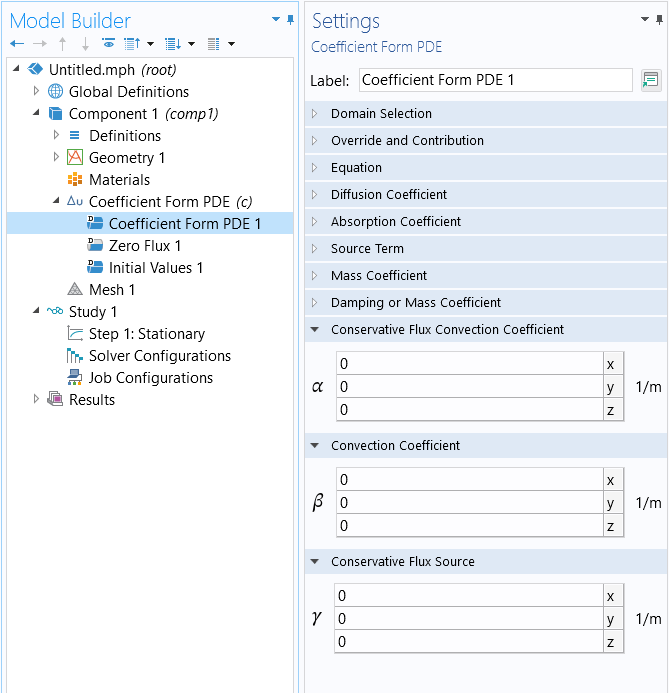
系数形式偏微分方程 节点下的矢量系数。
您可能会注意到,一阶时间导数的系数默认为  ,但只有选择了 瞬态 或 特征值 研究类型,该系数才会被激活。有关特征值方程的更多信息,请参见本系列课程的 第 5 部分。对于稳态研究,该系数没有影响,因为对于稳态偏微分方程 。
,但只有选择了 瞬态 或 特征值 研究类型,该系数才会被激活。有关特征值方程的更多信息,请参见本系列课程的 第 5 部分。对于稳态研究,该系数没有影响,因为对于稳态偏微分方程 。
要查看使用 系数形式偏微分方程 模拟泊松方程的示例,请阅读本课程 第 1 部分 中如何求解地月系统引力场的拉普拉斯方程和泊松方程。
热方程
现在让我们来看看如何将系数形式偏微分方程的系数与瞬态热方程的系数相匹配:

其中, 是温度,
是温度, 是密度,
是密度, 是热容量,
是热容量, 是热导率,
是热导率, 是体积源项。例如,源项可以是化学反应或电流产生的热量。
是体积源项。例如,源项可以是化学反应或电流产生的热量。
如果将其与系数形式偏微分方程进行比较:
我们将看到






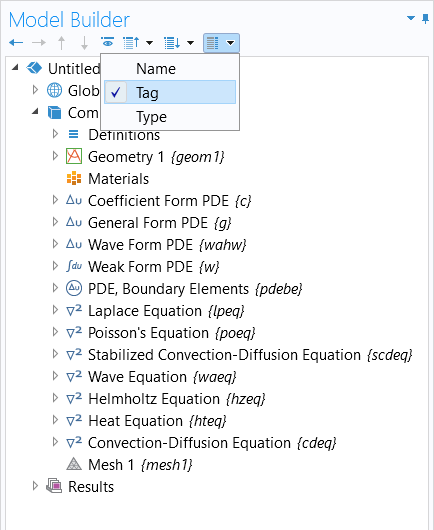
在模型向导中,还有一个专门的 热方程 接口,当与其他一些常用 偏微分方程 接口耦合使用时,它可以作为使用 系数形式偏微分方程 的替代方案。如下图所示,这些接口可作为 经典偏微分方程 的预定义数学接口使用。对于完整的传热建模,您可以使用 固体传热 接口或 传热 分支下的任何一个内置的物理场接口。
经典偏微分方程 接口,可通过 添加物理场 窗口或从模型向导中找到。
请注意,在热方程中,如果设置  就会得到与泊松方程的广义形式相同的稳态热方程:
就会得到与泊松方程的广义形式相同的稳态热方程:

要将因变量名称从 更改为 , 请转到 系数形式偏微分方程 节点,更改 因变量 栏的设置,如下图所示。
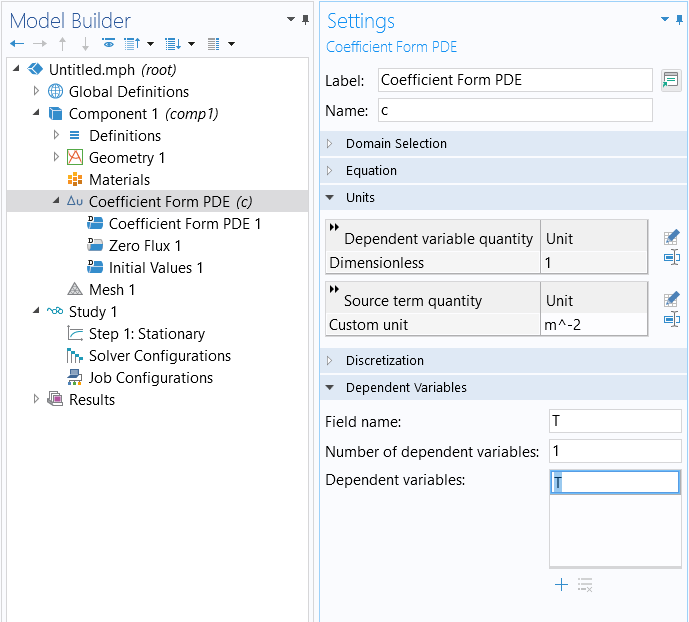
更改 系数形式偏微分方程 的因变量名称。
场名称 是指物理场(一般是矢量值)的名称,各个标量场分量变量可在 因变量 组合框中定义。对于热方程,我们可以将 场名称 和 因变量名 定义成相同的。
理解边界条件和通量
使用狄利克雷条件:
为边界上的因变量设置一个值。根据偏微分方程所描述的物理原理,这个值可以是温度、电压或浓度等。在使用偏微分方程或偏微分方程组描述结构力学的情况下,该边界条件用于设置边界上的规定位移。在后面的文章中,我们将介绍结构力学偏微分方程的情况。
广义诺伊曼边界条件
代表边界上的通量。要理解这一边界条件,需要将其与稳态系数形式偏微分方程进行比较:
由上式可以看到,对于偏微分方程和诺伊曼边界条件,括号内的表达式

是相同的。

表示偏微分方程的域通量。在偏微分方程代表守恒定律的情况下,偏微分方程的这一部分通常表示守恒量。
例如,如果偏微分方程是热方程,那么该通量为

即, 傅里叶热传导定律。
偏微分方程项

表示局部热通量守恒。
在没有热源的稳态情况下,可以得到

这表示每个无限小的控制体积都存在热平衡,换句话说,“有进必有出”。有关守恒定律的更多信息,请参阅 此处。
 项描述的是一个扩散过程,因此热方程有时被看作扩散方程的另一个版本。
项描述的是一个扩散过程,因此热方程有时被看作扩散方程的另一个版本。
在没有热源的瞬态情况下,可以得到

我们可以把它写成

其中

从能量守恒的角度来看,可以看作是一个源项,代表局部吸收或释放局部储存的热量。
如果我们现在回到广义诺伊曼边界条件,可以看到,对于热方程,这个边界条件为:

 表示穿过边界的热通量。如果我们想为模拟域提供更多热量,可以使用正边界热通量源项
表示穿过边界的热通量。如果我们想为模拟域提供更多热量,可以使用正边界热通量源项  。如果想提供冷却域,则使用
。如果想提供冷却域,则使用  。
。
 项有几种不同的物理含义。在传热应用中,最简单的解释可能是牛顿冷却定律,即假定边界上的冷却与温差成正比:
项有几种不同的物理含义。在传热应用中,最简单的解释可能是牛顿冷却定律,即假定边界上的冷却与温差成正比:

其中,  是传热系数,
是传热系数,  是固定的环境或外部温度。如果重新排列这个等式,会得到
是固定的环境或外部温度。如果重新排列这个等式,会得到

通过匹配系数,我们发现:


因此,一般来说, 代表边界通量,
代表边界通量, 代表某种薄膜、层或膜传导。
代表某种薄膜、层或膜传导。
相比之下,在结构力学中, 可解释为弹性层的刚度密度,也称为 弹簧常数密度。对于结构力学,因变量和系数是矢量和张量,而不是标量。结构力学模块和 MEMS 模块中的 固体力学 接口内置了用于弹性层和弹簧常数密度的功能。
一般形式偏微分方程
一般形式偏微分方程 接口是 系数形式偏微分方程 接口的简约形式:

具有相关的广义诺伊曼和狄利克雷边界条件:


这里, 是用因变量梯度表示的域通量 。
是用因变量梯度表示的域通量 。
在狄利克雷条件中, 是因变量中的一个方程。在施加该条件的边界上,此方程被设为零。例如,要将边界上的值设为 1,可将 定义为
是因变量中的一个方程。在施加该条件的边界上,此方程被设为零。例如,要将边界上的值设为 1,可将 定义为

我们可以利用一般形式偏微分方程,通过设置得到泊松方程:


一般形式偏微分方程 节点的默认设置,如下图所示。
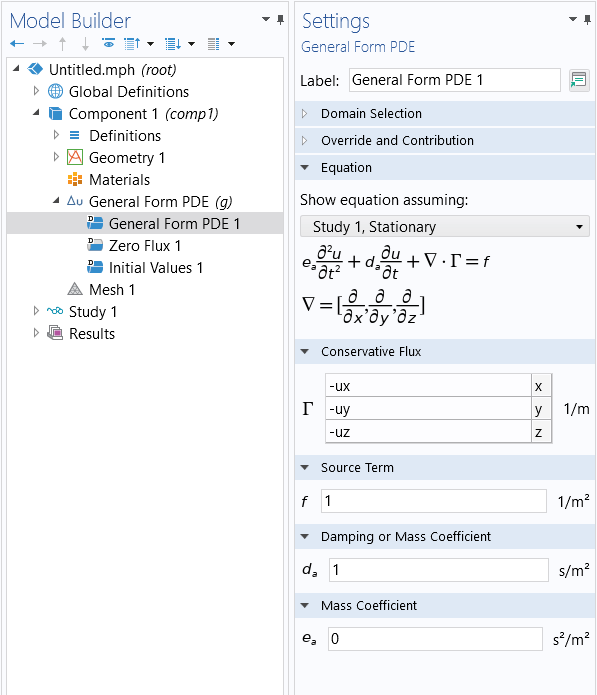
一般形式偏微分方程 节点的默认设置,与泊松方程相对应。
请注意,如果我们使用稳态研究,则瞬态系数未被激活。 一般来说,这个方程与系数形式偏微分方程的表达式一样。我们可以将系数形式偏微分方程转换为一般形式偏微分方程,如下所示:

这在 COMSOL Multiphysics® 用户接口中是可以实现的,因为我们可以使用下表中的语法来使用因变量的导数:
| 数学符号 | 用户接口语法 | 备选用户接口语法 |
|---|---|---|
 |
ux | d(u,x) |
 |
uy | d(u,y) |
 |
uz | d(u,z) |
定义泊松方程时,在用户接口中为  的不同通量分量输入梯度分量,但符号为负。
的不同通量分量输入梯度分量,但符号为负。
一般形式偏微分方程可以表达与系数形式偏微分方程完全相同的方程,使用哪一种只是方便与否的问题。只要表达的是相同的方程或方程组,两种方程形式在收敛性、准确性等方面没有区别。
常见工业应用中的扩散方程
不同版本的扩散方程构成了 COMSOL Multiphysics® 中多个内置物理场接口的基础。下表总结了一些最常用的扩散方程版本(点击表格可放大):
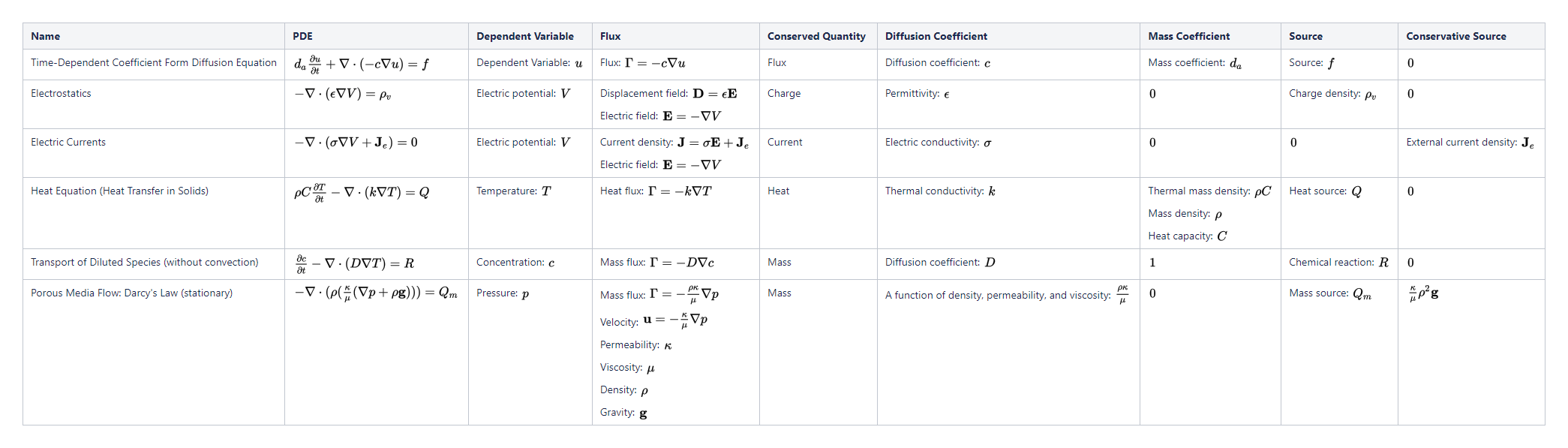 A table showing interfaces that correspond to different kinds of diffusion equations with columns for the PDE, dependent variable, flux, conserved quality, coefficients, and sources.
A table showing interfaces that correspond to different kinds of diffusion equations with columns for the PDE, dependent variable, flux, conserved quality, coefficients, and sources.
进阶学习
下图显示了案例库中 COMSOL Multiphysics 分支下提供的 基于方程 的模型。这些模型不需要任何 COMSOL 附加产品,并覆盖了许多不同的应用领域。
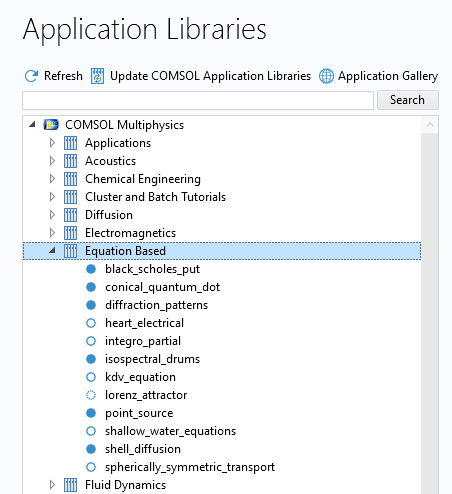
案例库中基于方程的示例模型。
在这里,您可以找到使用 数学 接口的模型示例,包括 系数形式偏微分方程 接口、一般形式偏微分方程 接口和 弱形式偏微分方程 接口。案例库中的其他模型也使用了 数学 接口。您可以在案例库中搜索相应的标签,进一步了解这些数学接口在模型中的使用方式及其背后的逻辑。例如,如果您想查看使用 系数形式偏微分方程 接口的模型列表,可以在搜索栏中输入 @tag:c 或 @physics:c。
请提交与此页面相关的反馈,或点击此处联系技术支持。