形成联合体和形成装配的正确用法
模型开发器节点下的几何分支由一系列几何操作功能组成,其中包括可用于创建模型几何的草图、几何体素、导入 CAD 文件、布尔运算等。在序列最后的 形成联合体 节点,您还可以选择将其更改为 形成装配,这一选择会影响用于物理场设置和网格划分的最终几何模型的生成方式。本文,我们将介绍这两种方法的区别,以及何时对它们进行切换。
教程视频:形成联合体和形成装配
更多细节和差异
形成联合体 和 形成装配 方法都是将模型中的几何对象联合起来形成一个对象。但是,它们处理模型中的域集合的方式有所不同。在此,我们将详细阐述上述教程视频中介绍的部分差异,并讨论视频中未涉及的其他因素。
什么是域?请参阅学习中心中关于 几何概念和术语 的文章,以了解更多信息。
形成联合体
形成联合体 是生成物理场几何模型默认的成型方法,等同于对几何序列中的所有对象进行布尔并集,并保留内部边界——即创建一个由多个不同域组成的单一几何对象。所有重叠的几何对象都将合并为一个对象,其中每个封闭体积对应不同的域。如下图所示,有三个不同大小的长方体在空间中相互堆叠。使用 形成联合体 操作的结果如下图所示,其中不同的颜色表示不同的结果域。要在软件中查看该结果,您可以下载本文随附的 长方体几何模型 的 MPH 文件, 显示几何标签并打开 选择列表 窗口,进一步明确 形成联合体 操作生成的结果域。
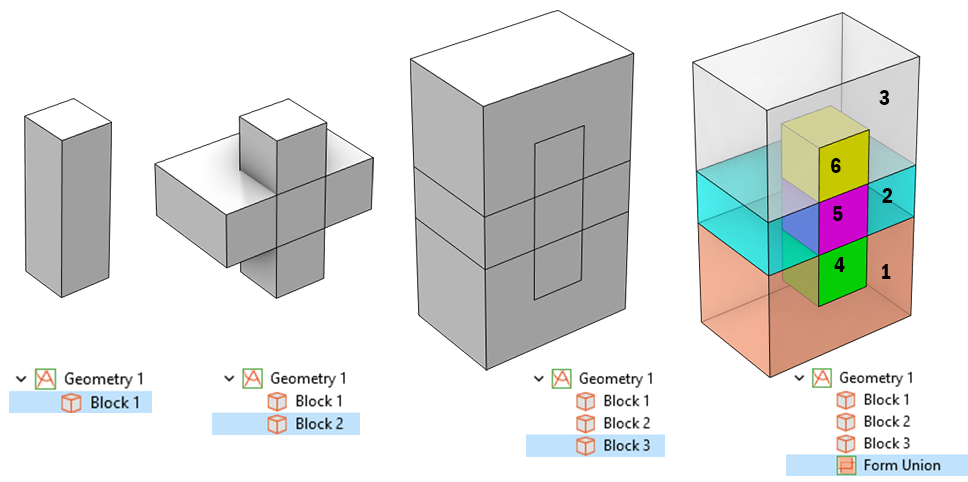
构建由三个长方体组成的几何体时(前三图所示的操作序列),采用 形成联合体 定型的几何整合体。最右边的图中显示了最终生成的不同域。
使用 形成联合体 最终确定几何对象后,生成的网格将保持连通且共形。也就是说,内部边界两侧的网格单元将共用相同的节点、边和面。划分内部边界网格后,您可以对不同的域应用不同大小的单元,如下图所示。
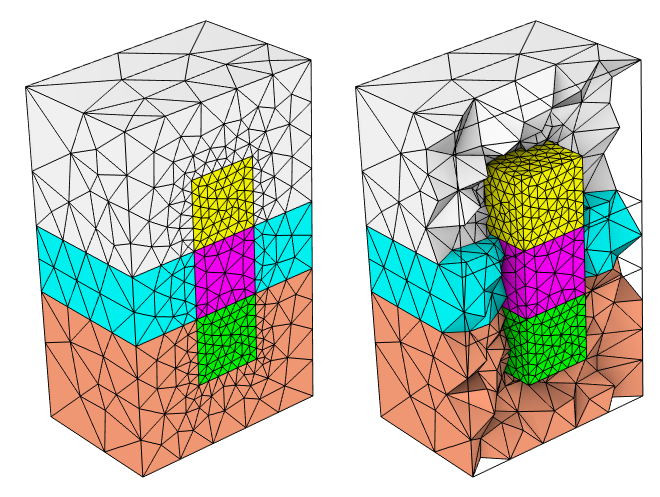
在几何的一些结果域中应用了不同大小的网格单元。无论单元大小如何不同,网格在所有内部边界都共形且连通。
在物理场设置中,不同域可以具有不同的材料属性。默认情况下,场和通量在内部边界将保持连续性,您也可以根据不同的物理场,在内部边界处添加各类不连续或突变条件。
对于所有求解磁矢势、电场或磁场的两个或三个分量(作为因变量)的电磁接口,都要求网格共形,即要求网格单元在所有边界上都是共形的。
形成联合体 步骤的物理含义是,模型中的域不能相对滑动或移动。这是由于 形成联合体 操作将在两个域之间为每对相接触的边界形成一个内部边界,这样得到的网格将在内部边界上保持连通且共形。对于在 COMSOL Multiphysics® 中建立的大多数模拟场景,这是一个合适的默认设置,但在需要模拟相邻物体相对运动的情况下将不再适用。若需实现相邻域的相对运动,或需要在相邻域间建立非共形网格,就需要将 形成联合体 更改为 形成装配。
形成装配
与 形成联合体 不同,形成装配 并不计算几何对象的布尔并集,而是将它们集合到一个装配对象中。执行 形成装配 操作后,相邻对象将成为相互独立的域,并可根据需要进行移动。因此,当您的几何序列中存在接触对象时,需要为以下物理场接口切换 形成装配:
- 包含 接触 的 固体力学 接口
- 多体动力学 接口
- 旋转机械,磁 接口
- 旋转机械,流体流动 接口
由于 形成装配 不计算几何对象的布尔并集,因此无法使用 形成装配 为对象之间的重叠区域生成域,几何对象中域的数量不会因 形成装配 操作而改变。下图中相邻的圆环和长方体对象在使用 形成装配 后成为两个断开的域。要在软件中查看到这一点,您可以下载并打开本文随附的 [圆环和长方体](add model file) 模型 MPH 文件。
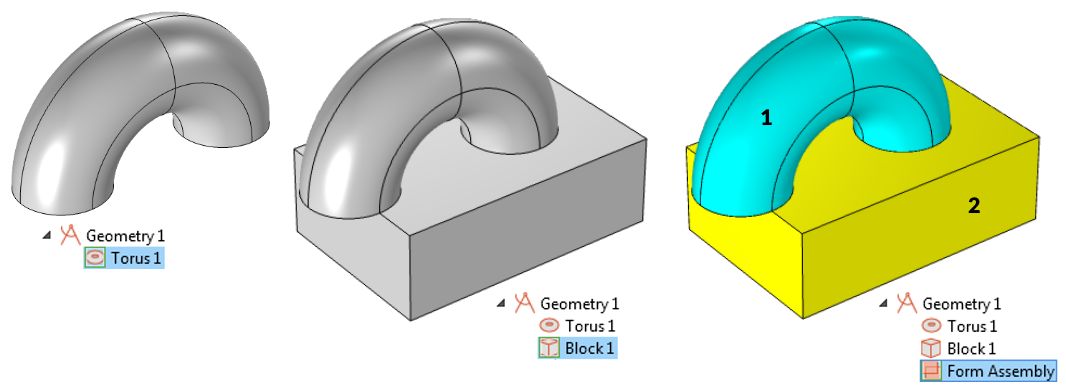
使用 形成装配 最终确定了构成环和长方体(左图和中图)几何的操作序列。最右边的图显示了形成最终几何后的不同域。
形成装配 操作将识别所有对象的接触边界,并形成所谓的 一致对 或 接触对。默认情况下软件会自动创建这些对,但也可以手动设置。这两种类型的对还可以使用创建压印 选项来生成,即,将面的轮廓相互进行投影。以下是相互接触的圆环和长方体的示意图,分解视图突出显示了组成对的面。
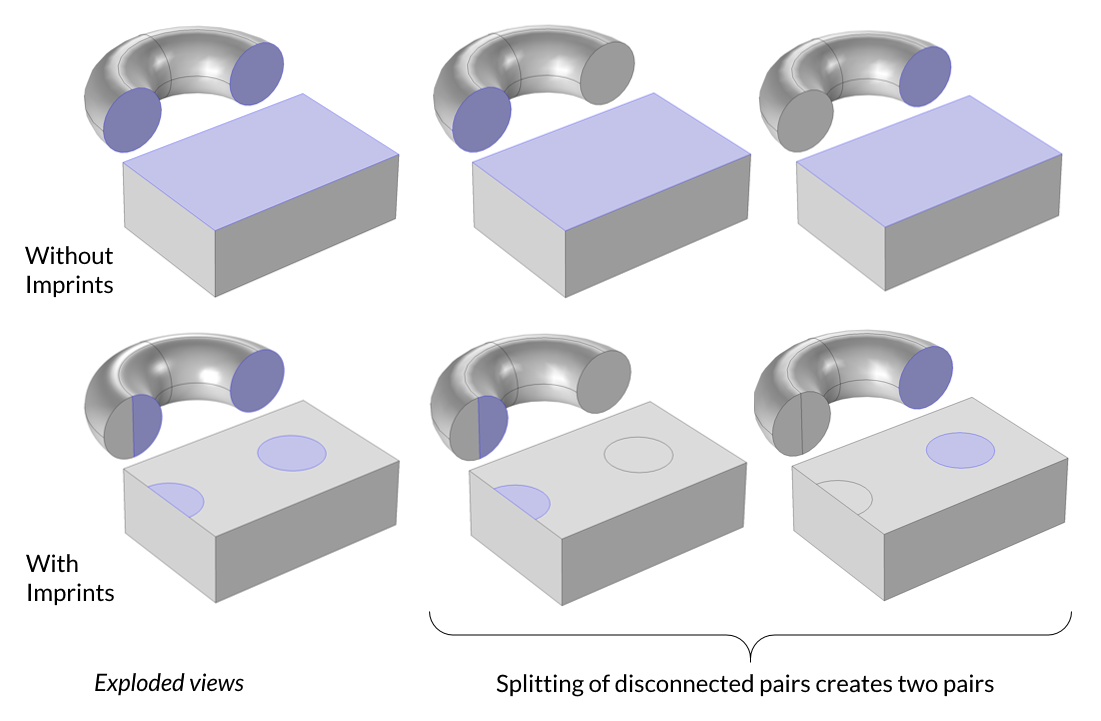
无压印(上图)和有压印(下图)的形成装配的分解图。
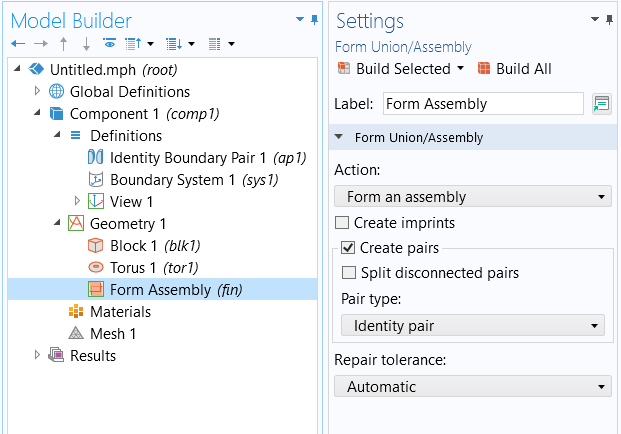
形成装配 节点的 设置 窗口。
默认情况下,对于两个域之间的所有接触面,软件会创建一个用于定义配对面的配对,即使这些面在每个域内并不相邻。若要更改此默认设置,可勾选 拆分非连接对 复选框,这样软件就会为每个配对面创建一个配对,如上图中的分解图所示。
选择创建 一致对 还是 接触对 取决于您要求解的物理问题。只有在求解具有 接触 特征的结构力学问题时,才需要创建 接触对。也就是说,面可以接触和脱离,也可以相对滑动,而力和磁通量只有在面接触时才会在面之间传递。
在使用任何 旋转机械 接口时,选择“形成一致对,无压印,无拆分非连接对”等选项都是非常合适的。也可以选择不创建任何对,这在求解多体动力学问题时非常有用。
您可以禁用自动生成的边界对,还可以更改边界对的类型,例如,当您只需在几何模型的某些位置应用 接触 特征时,这种操作将非常有用。此外,您还可以在几何序列中使用 布尔并集 操作来合并部分对象,然后使用 形成装配 为其余对象之间的配对面生成接触对。
如果您希望内部边界上的网格不连续,形成装配 功能也很有帮助,我们将在下文中进一步详细介绍。
形成装配后的网格划分
使用 形成装配 创建的网格在边界对的两侧是不连续的,因此网格在断开的域之间是不一致的。配对面上的网格单元不共用节点、边或面。这些网格既可以是相互匹配的,也可以是不匹配的,具体取决于网格的创建方式。启用压印后,配对面的形状将完全相同,但两个配对面的网格并不相连,可以是不匹配的。使用此选项时,您可以通过以下方法在配对面上创建匹配的网格:
- 使用 相同网格 属性,如下面的动画演示。
- 使用 复制面 操作。首先为配对面的其中一侧创建网格,然后使用 复制面 将网格复制到另一侧。创建好的网格如下图右所示。如需了解更多信息,请参阅本文随附的圆环和长方体几何模型的 MPH 文件(点击 此处 下载)。
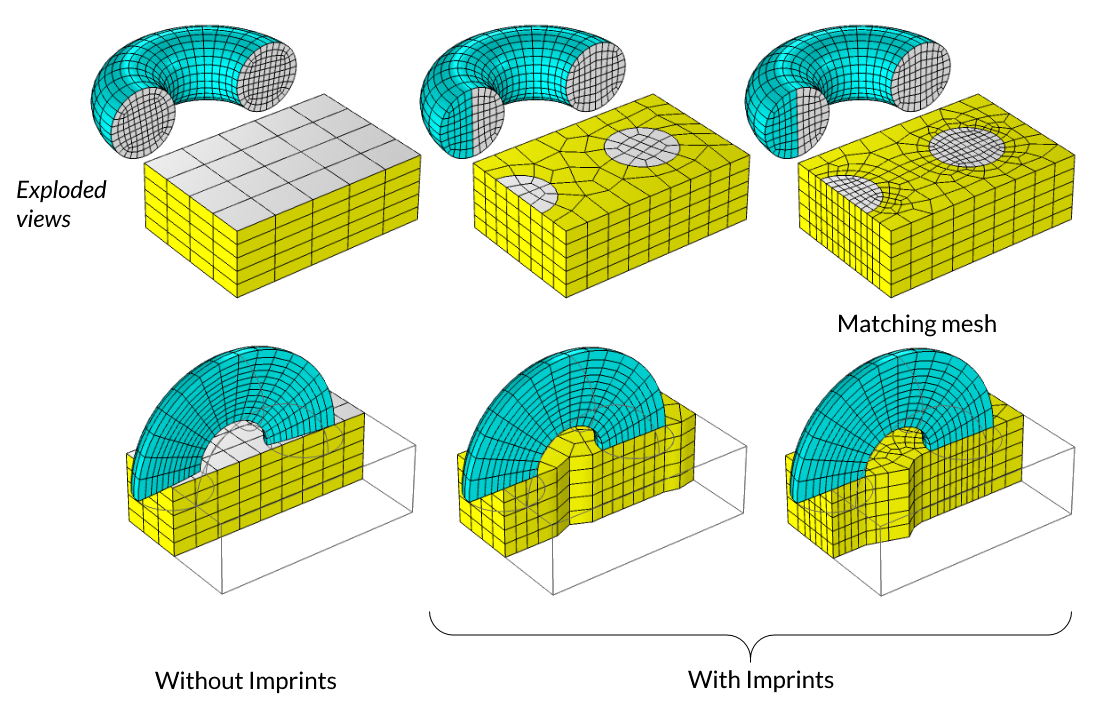
使用 形成装配 形成的由部分圆环和长方体组成的最终几何体。分解视图显示了几何的非匹配网格和匹配网格的差异。
在使用 形成装配 的情况下,通过为物理场应用 连续性 边界条件,可确保场或通量在边界对上的连续性。(请在软件案例库中搜索 @tag:cont 和 @tag:dcont 查看相关示例)。在大多数情况下,连续性 边界条件将默认应用于模型中的所有 一致对 和物理场接口,但您也可以改用不连续或突变性的条件。连续性 边界条件将近似强制执行场和通量穿过对边界时的连续性。相比之下,使用 形成联合体 后的网格在内部边界上是共形,因此场和通量的连续性自然可以通过有限元方法得到满足。通常情况下,使用非共形网格得到的结果不如使用共形网格得到的结果精确,因此使用非匹配网格得到的结果不如使用匹配网格得到的结果精确。简而言之,使用 形成联合体 后的网格结果最精确,但求解所需的内存也最大,而使用不带压印的 形成装配 后的非匹配网格结果最不精确,但求解所需的内存也相对较少。
如果您想减少网格中的单元数量,以减少求解所需的内存,切换到 形成装配 可能会有所帮助。建议对涉及热分析和结构分析的问题使用非匹配网格。此类模型通常包含具有不同特征尺寸的几何对象,因此网格单元大小也不同。在这些情况下使用 形成装配 方法生成用于添加物理场和网格划分的几何模型时,可能显示出最大的优势,即,使用更少的内存,同时仍能提供良好的精度。
形成装配的应用案例
如前所述,在某些几何建模情况下,您应该从默认的 形成联合体 几何最终定型方法切换到 形成装配 方法。例如,在使用 旋转机械 接口或进行接触或多体动力学仿真时。该功能可以更有效地对例如大型 CAD 装配,以及复杂的 PCB 和芯片设计模型的几何进行网格划分。请查看以下资源,了解更多有关 形成装配 应用案例的信息:
- 多体动力学:弹簧加载的离心调速器(视频)
- 接触仿真:为结构接触建模创建接触对(视频)
- 旋转机械:微混合器中的粒子追踪(视频)
- 复杂电路板和芯片设计:表面贴装电阻的热机械分析(PDF 模型文件)
- 时域显式应用:解析波的传播(博客文章,请参阅 “网格划分与求解” 部分)
请提交与此页面相关的反馈,或点击此处联系技术支持。