扫地机器人的激光雷达空间映射
Application ID: 108821
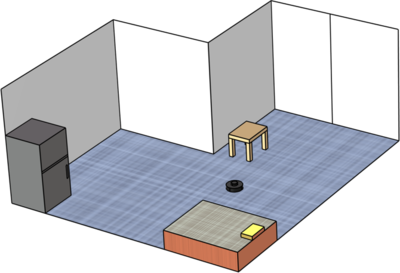
现代智能扫地机器人普遍配备激光雷达系统,通过空间映射实现精准建图和最优清洁路径规划,在自主避障的同时高效完成室内导航。本模型基于几何光学原理,模拟了激光雷达在扫地机器人中的工作过程及其空间建图机制。该原理同样适用于自动驾驶、地理测绘等其他激光雷达应用场景。
案例中展示的此类问题通常可通过以下产品建模:
您可能需要以下相关模块才能创建并运行这个模型,包括:
建模所需的 COMSOL® 产品组合取决于多种因素,包括边界条件、材料属性、物理场接口及零件库,等等。不同模块可能具有相同的特定功能,详情可以查阅技术规格表,推荐您通过免费的试用许可证来确定满足您的建模需求的正确产品组合。如有任何疑问,欢迎咨询 COMSOL 销售和技术支持团队,我们会为您提供满意的答复。