微流控系统通过比人类发丝更细微的微通道操控流体。作为该系统的核心组件,微泵在生物流体处理与微电子冷却等领域具有广泛应用。多物理场仿真技术使工程师能够以微观尺度所需的精度进行微泵设计。
编者注:本文初版发表于2015年7月17日,本次更新包含修订文本及新版本软件制作的模型图。
微泵设计面临的挑战
在微通道中对流体进行混合、分离和输送具有一定的设计挑战。工程师必须设计出满足微尺寸要求且性能优异的微泵。无阀泵凭借设计简单以及对生物材料更加温和的特性,常被选作微泵方案。然而,在没有传统泵的止回阀的情况下,维持单向流体流动具有挑战性。无阀微泵则依靠结构与流体之间的相互作用来实现单向流动。因此,无阀泵设计不适用于雷诺数较低的流体,或涉及黏性流体、小尺度或低流率的应用。COMSOL认证顾问Veryst Engineering 公司开发了一个模拟无阀微泵机理的模型,克服了这一设计限制。
在 Veryst 的模型中,微泵通过往复式驱动机构等方式,产生振荡流体运动。流体进入水平通道,通道两侧以倾斜角度布置可弯曲的微型阀瓣。这些阀瓣随流体运动发生弯曲,从而实现单向流动,无需采用阀门系统复杂的同步驱动机制。
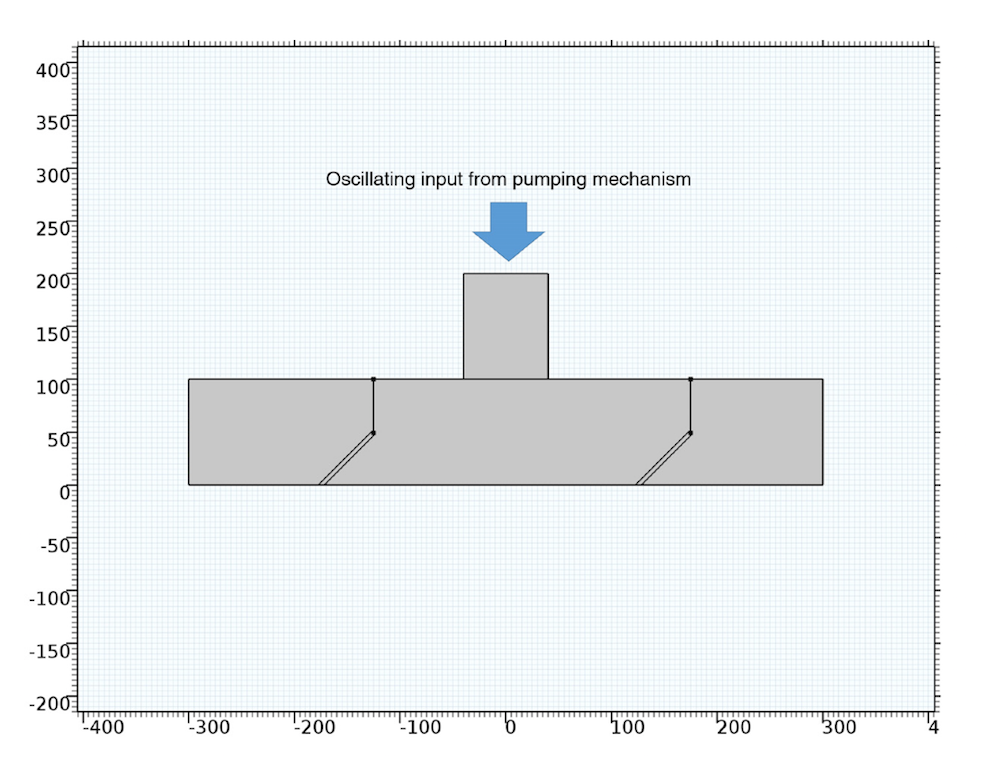 微泵机理模型的几何结构。
微泵机理模型的几何结构。
通过仿真评估微泵性能
在此模型中,雷诺数设定为16,但也适用于雷诺数远小于1的情况。在 COMSOL Multiphysics® 软件中,通过 流-固耦合 接口设置输入振荡流以及微型阀瓣的物理属性,随后计算阀瓣的响应及其对流体流动的影响。全局常微分和微分代数方程 接口用于计算2秒泵送周期内随时间变化的净泵送率。
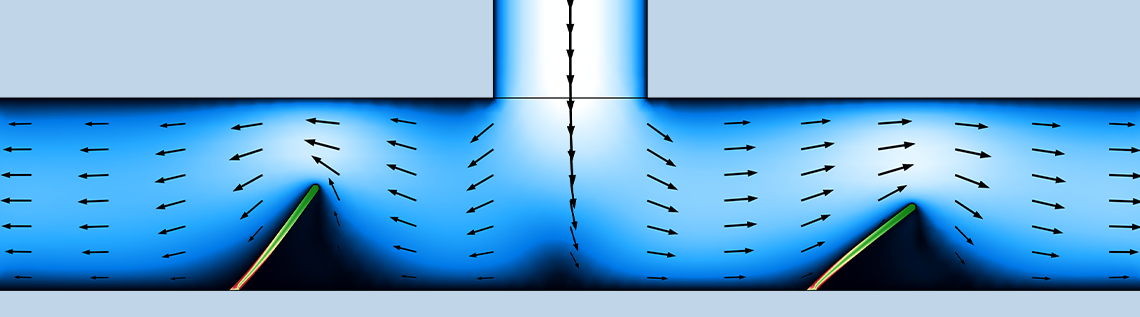
模拟从微泵的下冲程开始,即微泵将流体向下推入垂直腔室时。此操作会导致右侧阀瓣向下弯曲,同时左侧阀瓣向上弯曲。在此位置,左侧阀瓣阻碍流体流向左边,右侧流道被拓宽。这种结构自然地引导大部分流体向右流动,因为这是阻力最小的路径。
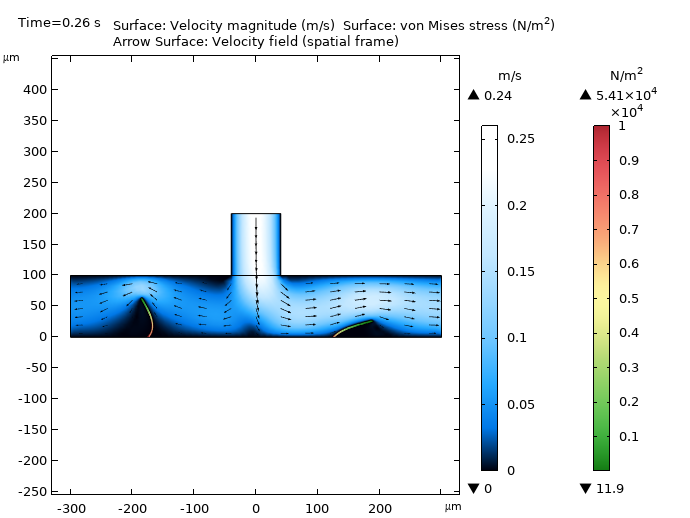 在泵的下冲程期间测量流速大小、速度场和 von Mises应力,此时大部分流体被推向通道右侧。
在泵的下冲程期间测量流速大小、速度场和 von Mises应力,此时大部分流体被推向通道右侧。
在泵送上冲程期间,流体被泵入垂直腔室。上冲程产生的流动使阀瓣弯曲方向与下冲程时相反。这种变化不会改变净流方向,因为此时大部分流体从左侧入口被吸入流动通道。
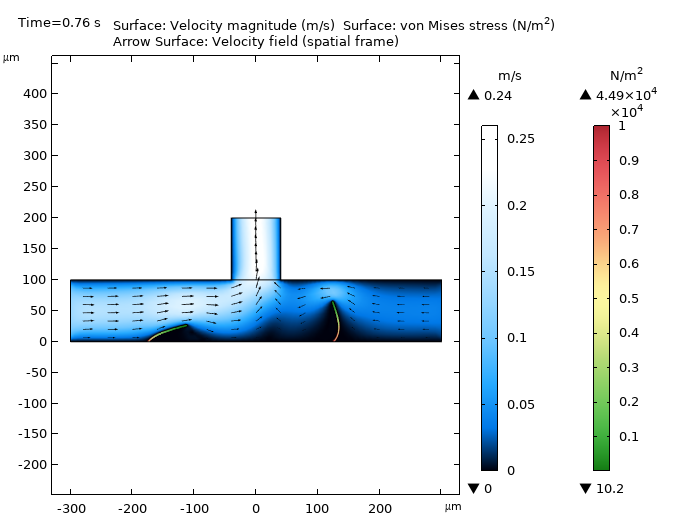 在 0.76s 时,流体被吸入,其中大部分流体在泵送上冲程期间从左侧入口流入。
在 0.76s 时,流体被吸入,其中大部分流体在泵送上冲程期间从左侧入口流入。
由于流动流体引起的阀瓣自然变形,这两个阶段均产生了从左向右的净流率。但在整个模拟时间内,此微泵机理维持这种流动的效果如何?
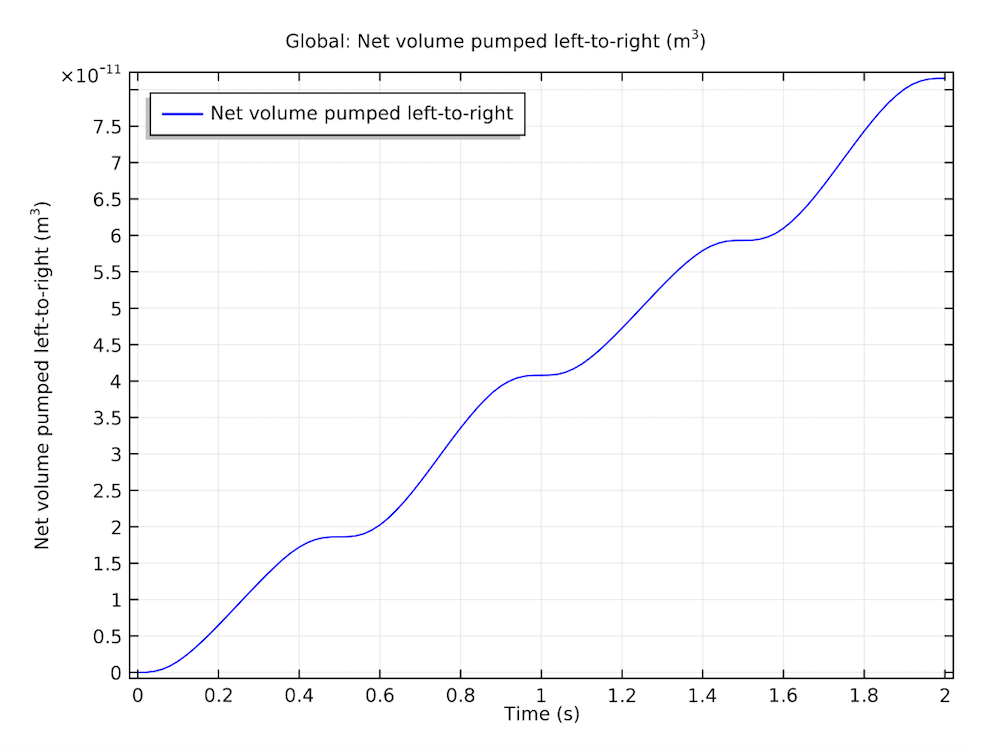 随时间变化的从左到右泵送的净流体积。
随时间变化的从左到右泵送的净流体积。
在为期 2 秒的测试中,从左向右的净泵送体积持续增加,在冲程速度达到峰值时净流率更高。这表明此模拟无阀微泵机理的模型能在如此低的雷诺数下有效工作,克服了许多无阀微泵普遍存在的局限性。
这种无阀微泵机理未来可能有许多应用,其中之一是用作流体输送系统。在这种应用中,微泵的工作机理可以从左侧的液滴储液池中吸取流体,并通过微流体通道将其输送到右侧的出口。
下一节
在这篇博客文章中,我们仅展示了一组模拟结果。通过自己动手实践 Veryst Engineering 提供的教程模型,您可以直观地了解无阀微泵在不同场景下的工作机理。
评论 (1)
ch k
2025-12-17nice