多体动力学模块更新
COMSOL Multiphysics® 5.4 版本为“多体动力学模块”的用户引入了装配的流-固耦合、柔性连接件以及用于增强后处理功能的参考坐标系。请阅读以下内容,进一步了解这些多体动力学特征。
装配的流-固耦合
流-固耦合 多物理场耦合功能得到扩展,现在包含流体与多体系统之间的相互作用,支持研究机构与流体相互作用问题。大部分多体系统都构建为装配结构,从而产生一种新的耦合类型——固体上的网格可以相对于流体域中的网格进行滑移。
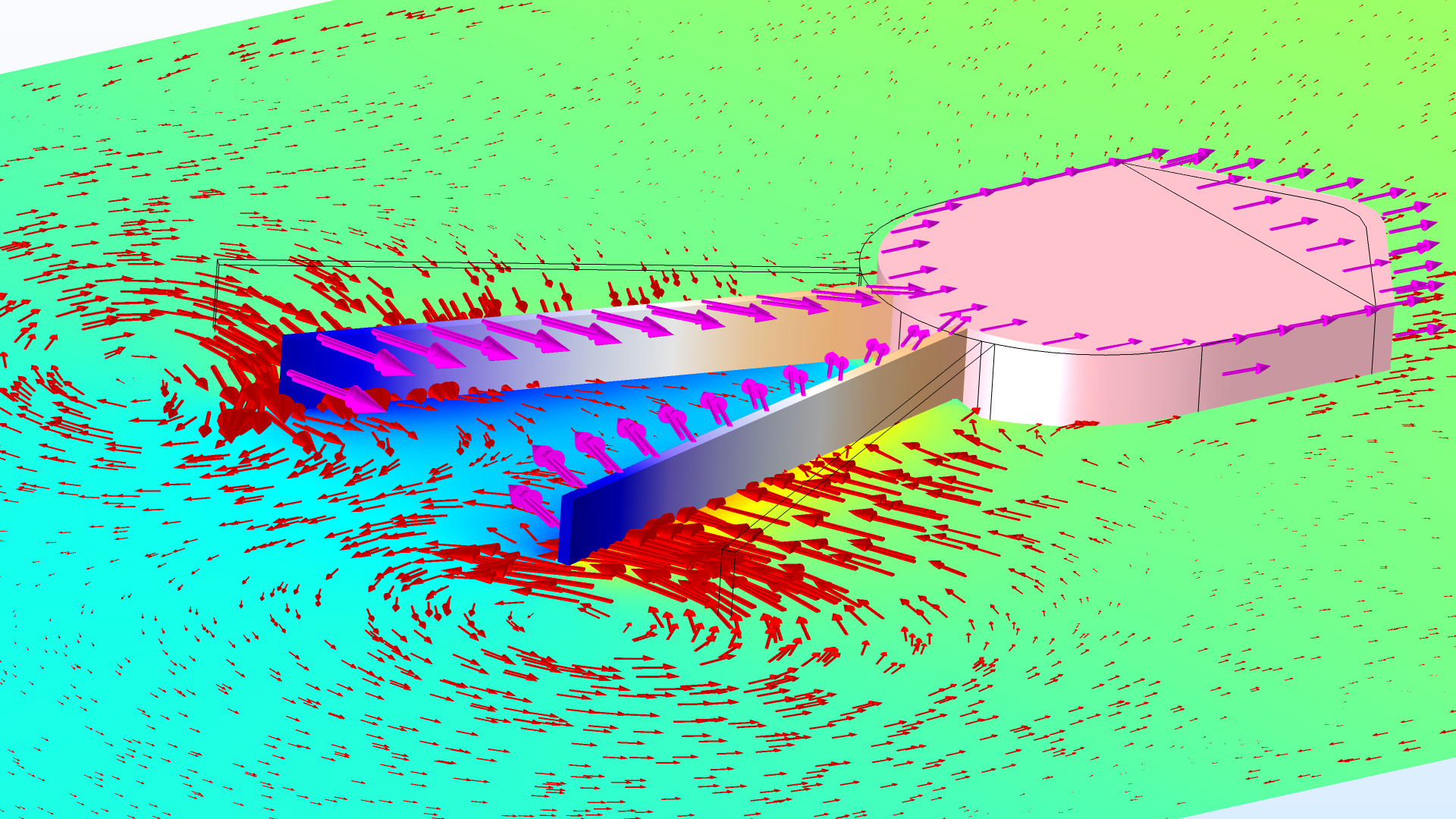
浸入流体的机构由闭合运动引起流体向前运动。洋红色箭头表示结构速度,红色箭头表示流体速度,流体表面根据压力着色,机构表面根据位移着色。
柔性连接件
连接件 特征已经升级,现在包含一个新的柔性 公式。启用该公式后,您可以避免在与连接件相连的边界上进行人工应力刚化和施加伪应力,新公式不仅可以让边界发生变形,还可以平均施加约束,同时保持力和力矩平衡。
以下模型使用了这一特征:
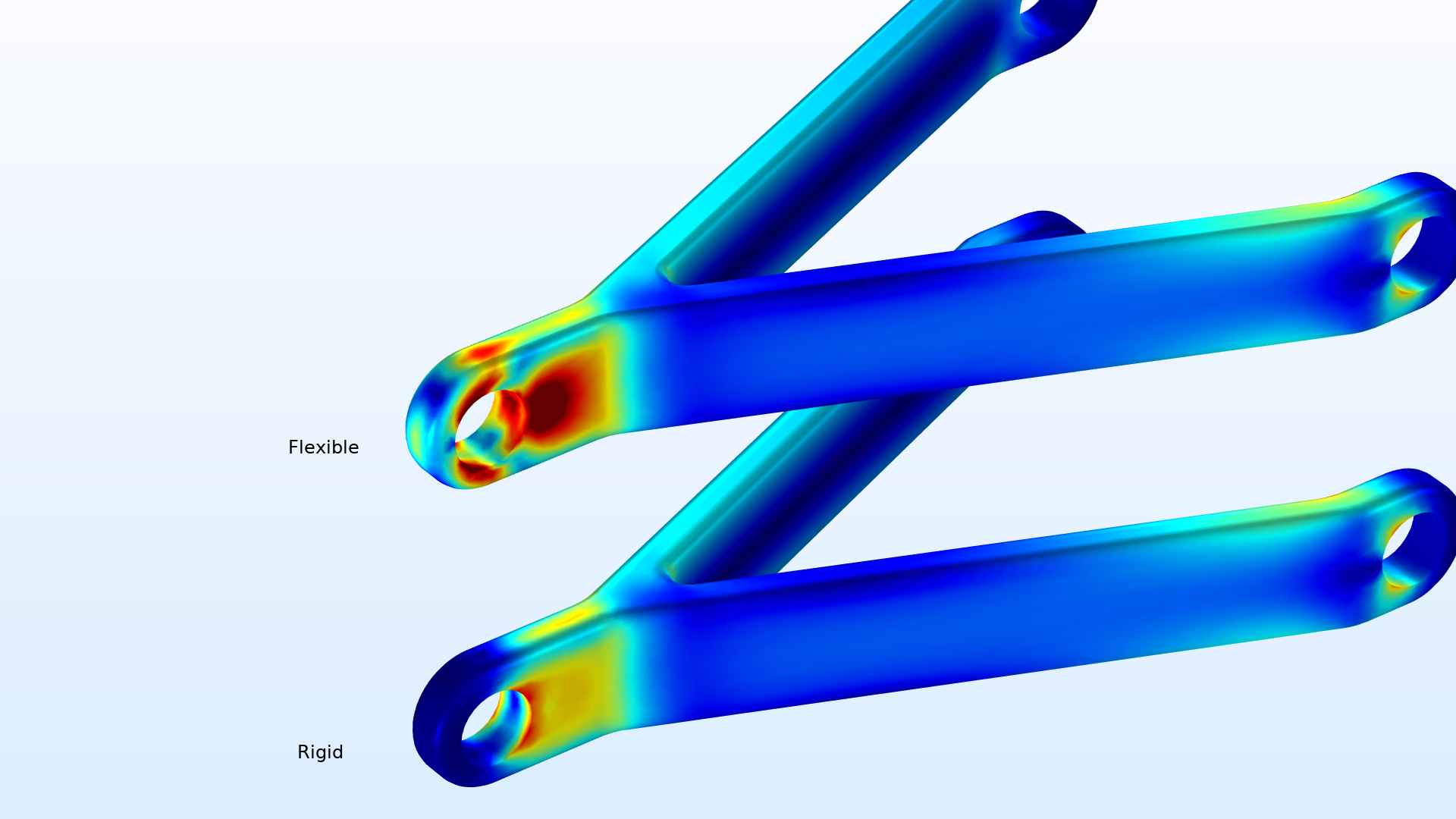
使用刚性连接件或柔性连接件时铰链关节附近的局部应力状态比较图。
滚动轴承
多体动力学 接口中新增了六种滚动轴承模型,可实现由轴承支撑的旋转体的高保真建模。每种轴承都可以包含一排或两排滚动体,轴承模型包含滚动体与内外圈接触刚度的非线性表示。请注意,需要“转子动力学模块”许可证才能使用此特征。
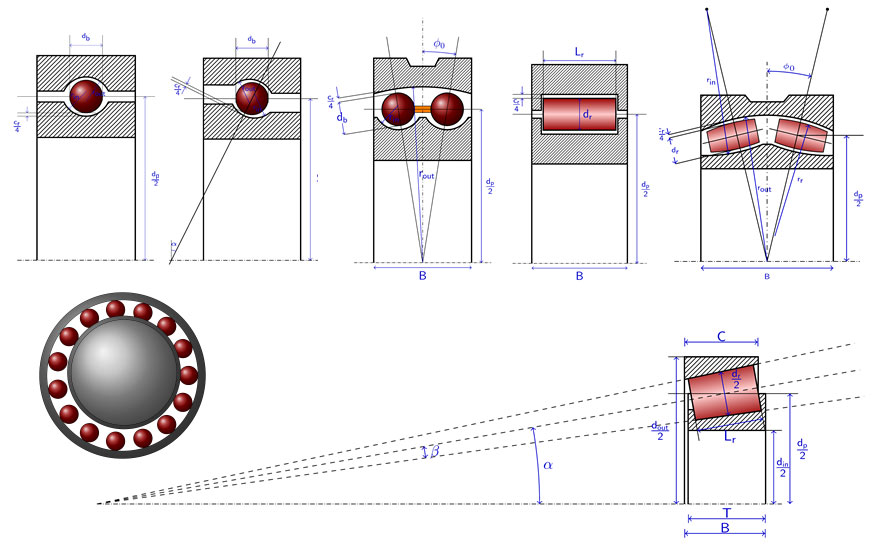
不同轴承类型及其几何参数的草图。
用于结果演示的参考坐标系
在多体动力学模型中,您常常需要在相对于运动件的坐标系中绘制位移或速度等结果。现在,通过在多体动力学 节点新增的结果 栏中选择用于定义参考坐标系的体,可以实现这一功能。您可以选择任意刚性域、连接件 或齿轮 特征,作为定义参考坐标系的体。
以下模型使用了这一特征:
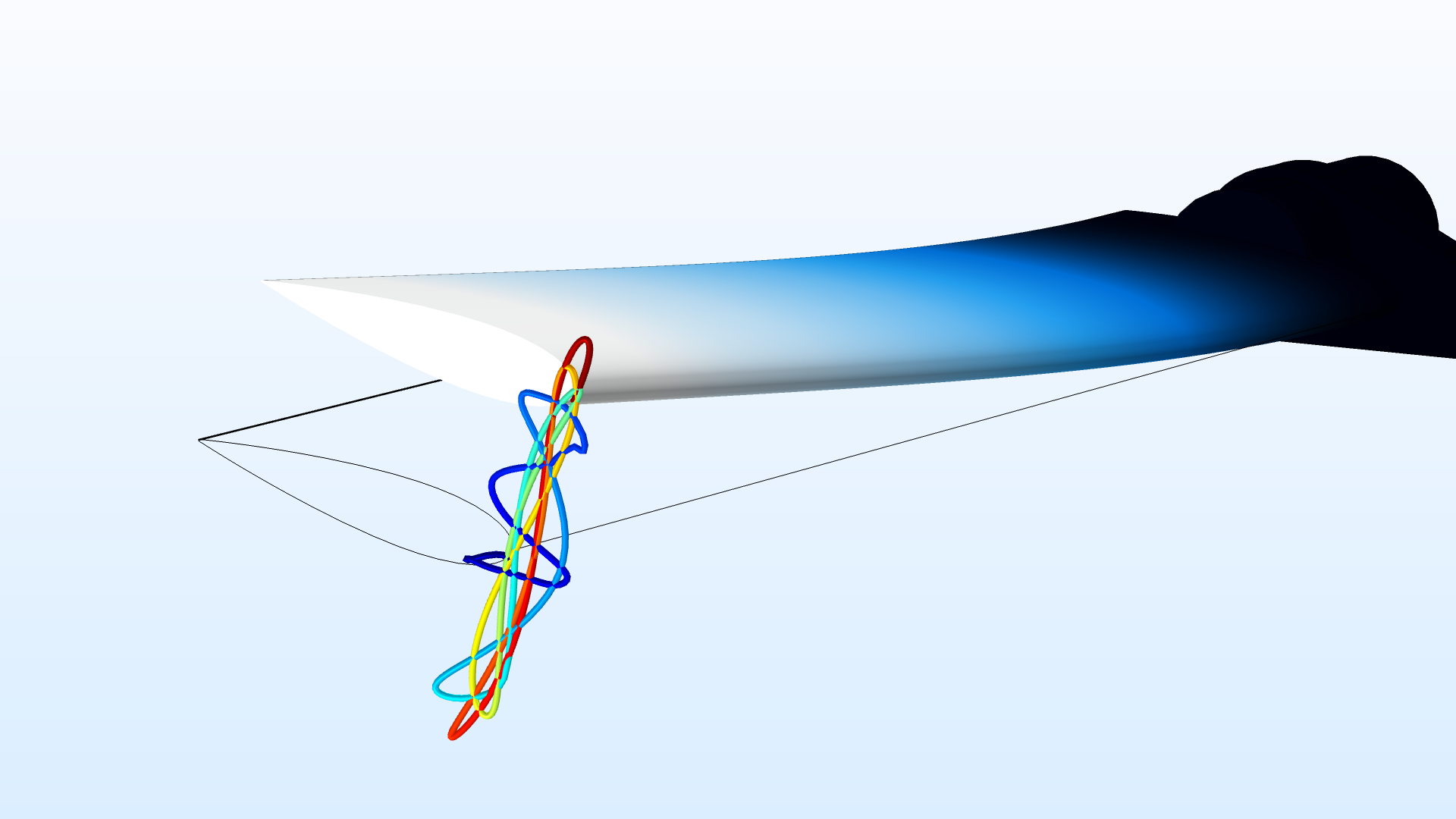
直升机旋翼桨叶桨尖的轨迹(在与桨叶连接件同速旋转的坐标系中表示)。
辊支承条件支持解析法向
在辊支承 边界条件中,您现在可以指定结构在其上滑动的解析表面,如此一来,您可以使用辊支承条件分析有限位移和旋转。这一新功能还可用于避免边界法向不够理想的情况,例如使用导入的网格时可能发生的情况。
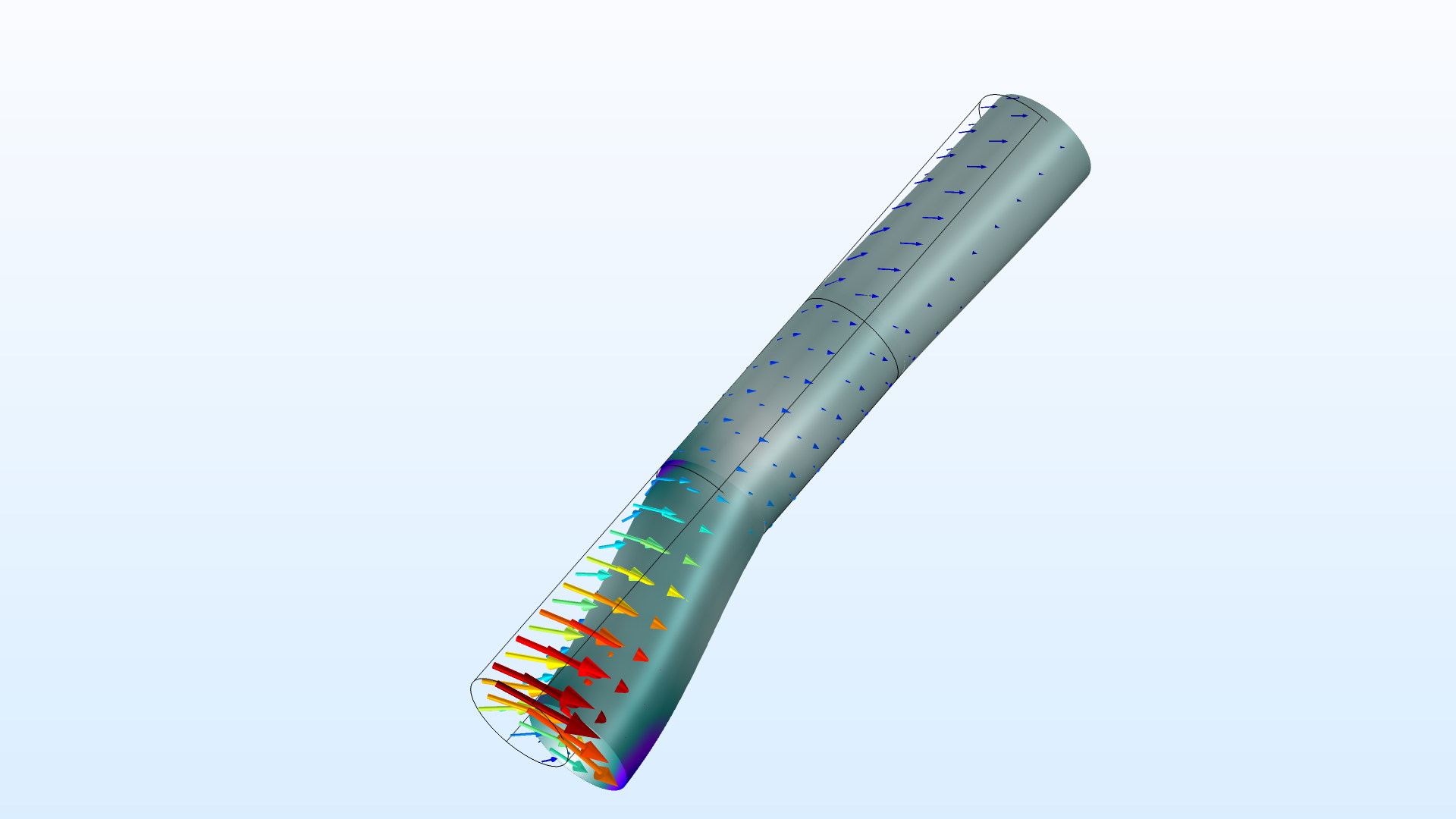
杆的中间部分使用了定义为圆柱面的辊支承条件,使杆可以绕轴自由旋转,也可以轴向平移。
滚子的力分布
在径向滚子轴承 特征中,通过使用接触力学计算每个滚珠或滚子传递的力,可以精确计算接触力分布。现在,对于此类轴承,您可以将连接到内圈的边界上的滚子力分布进行可视化。您需要“转子动力学模块”许可证才能在多体动力学 接口中使用此功能。
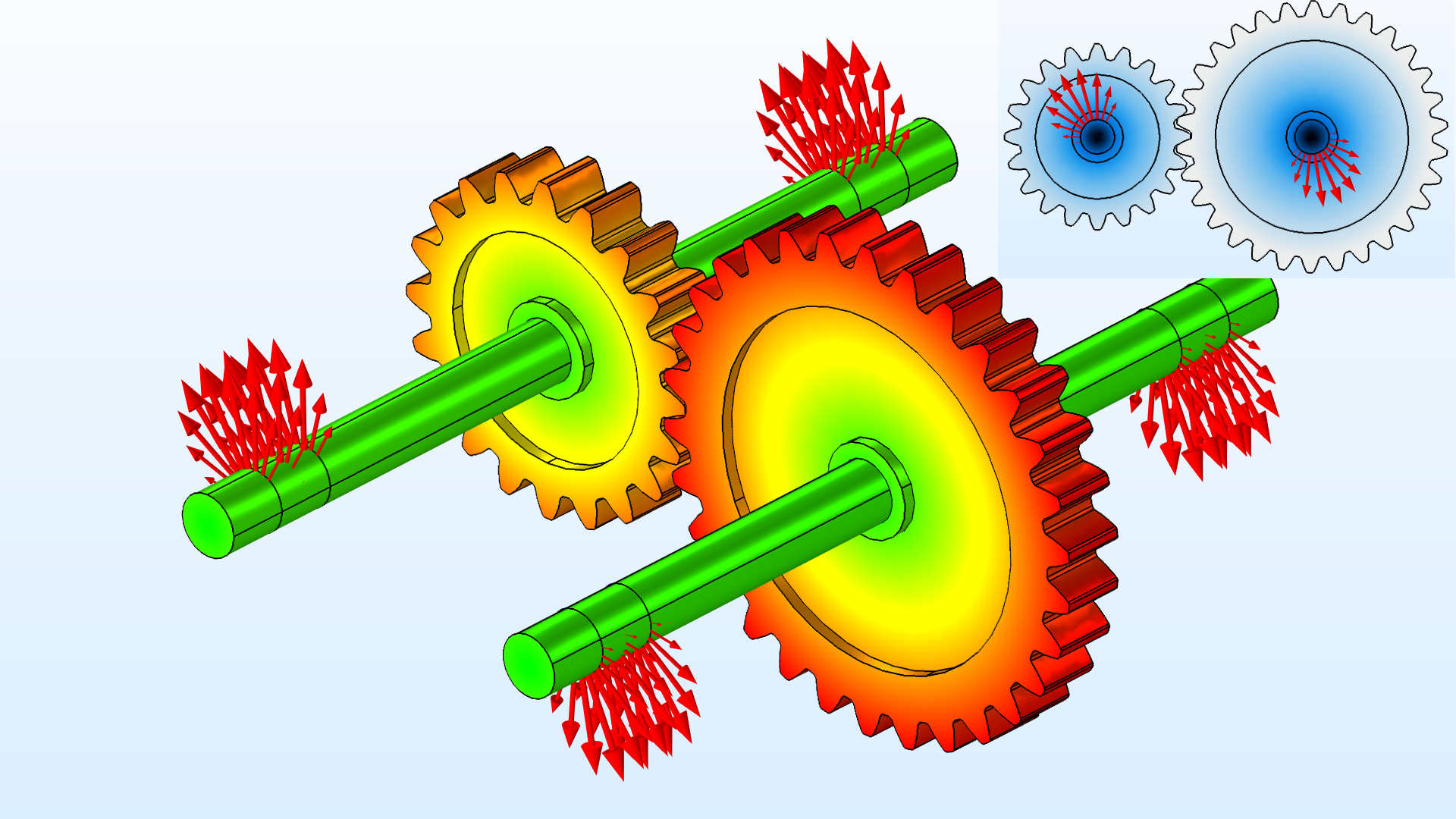
齿轮传动转子总成中所有轴承上的转子位移和滚子的力分布情况。右上:前视图。