通用 博客文章
借助仿真 App 评估静态混合器的性能
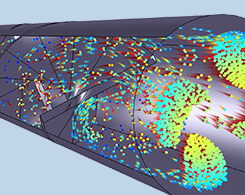
静态混合器因其高效、成本低廉、易于安装且维护要求低等优点,成为各类工程领域的常用工具。在评估混合器能否满足某种使用目的时,一个重要的判断指标是得到的混合物是否足够均匀。在本篇博客文章中,我们将介绍如何借助“粒子追踪模块”,开发一款能定量和定性分析静态混合器性能的 App。
借助 App 高效分析土木工程设计
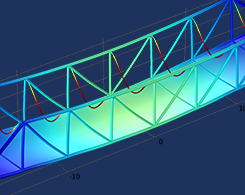
在你的脑海中想象某种类型的土木工程结构,比如普拉特桁架桥。每一类桥梁的设计理念是相似的,桥的实际结构和承受载荷却各有不同。借助“App 开发器”,你可以设计一种仿真工具,使得用户可以轻松地修改参数,借此描述并分析各种不同的几何结构和载荷。让我们一起认识“桁架桥设计器”计算 App。

优化 COMSOL Server™ Web 界面,展示您的品牌形象
用户的需求一直激励着我们不断推陈出新,全新的 COMSOL Multiphysics® 软件和 COMSOL Server™ 产品 5.2a 版本正是广大用户推动的成果。定制 COMSOL Server Web 界面也正是用户期待的功能之一。让我们一起来看看用户反馈是如何促进我们软件开发的,让您轻松更换界面外观,展示各组织的不同品牌。
如何在温控器仿真中实现延时功能
为了使室内保持舒适的温度,许多家庭都会使用暖气或空调一类的温度调节装置。一个简单的温控器通常具有开 和 关 两个设定点,并以此来实现对温度的控制。只要使用事件 接口,您就能轻而易举地在 COMSOL Multiphysics 中模拟此类控制方案,具体操作请参考之前发布的一篇博客文章。在本文中,我们将在温控器仿真中加入延时功能,使加热器在开启与关闭操作之间保持一定的时间间隔。
COMSOL Multiphysics® 直观的建模环境
仿真,是一件极为强大的工具,借助它可以让您对自己产品的设计性能有直观、全面的了解。研究的物理场或许很复杂,然而却可以在简单的建模环境中进行此类研究。正是以这一理念作为软件设计背后的逻辑,COMSOL Multiphysics® 软件的用户界面(UI)才不断被优化、易用性也在不断提升。在本篇博客文章中,我们从多个相关教学视频中挑选了其中三个具有代表性的视频,希望能为您熟悉建模环境及学习相关工具的使用提供指导。
仿真中设置边界条件的方法
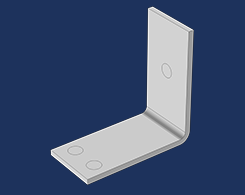
假设你正在模拟这样一种情况:在模拟过程中,载荷在不同的网格单元和边界上移动。如果你希望仅对一部分几何边界或只在特定条件下施加边界条件,该怎么处理?在这篇博客中,我们将讨论如何利用 COMSOL Multiphysics 灵活处理这种特殊情况。
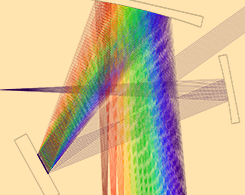
体验 COMSOL Multiphysics® 5.2a 中全新的射线追踪算法
使用新发布的 COMSOL Multiphysics® 5.2a 版本,可以在网格未剖分的域内实现射线追踪,甚至还能释放和追踪几何外的射线。“射线光学模块”提供了一个全新的算法,所涉及的功能远不止上面所提到的,由此您可以轻松准确地模拟射线光学设计。让我们来探讨一下,在建立典型的射线光学模型时,这一新算法会对工作流产生怎样的影响。
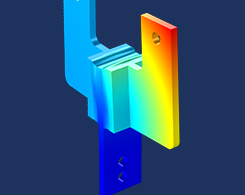
仿真 App: 分析粘弹性结构阻尼器的设计
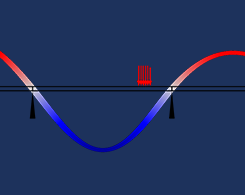
您是否有在刮风天置身于高楼中,或者看见飞机掠过您的房顶的体验?伴随着那种具有破坏性、并且让您感到不愉快的噪声,可能还会感受到一些低频振动影响了建筑结构的稳定性。解决这一问题的方法之一就是,将阻尼器——特别是粘弹性结构阻尼器纳入结构设计中。通过仿真 App,优化这些设备的方法变得前所未有的简单。