通用 博客文章

优化 COMSOL Server™ Web 界面,展示您的品牌形象
用户的需求一直激励着我们不断推陈出新,全新的 COMSOL Multiphysics® 软件和 COMSOL Server™ 产品 5.2a 版本正是广大用户推动的成果。定制 COMSOL Server Web 界面也正是用户期待的功能之一。让我们一起来看看用户反馈是如何促进我们软件开发的,让您轻松更换界面外观,展示各组织的不同品牌。
如何在温控器仿真中实现延时功能
为了使室内保持舒适的温度,许多家庭都会使用暖气或空调一类的温度调节装置。一个简单的温控器通常具有开 和 关 两个设定点,并以此来实现对温度的控制。只要使用事件 接口,您就能轻而易举地在 COMSOL Multiphysics 中模拟此类控制方案,具体操作请参考之前发布的一篇博客文章。在本文中,我们将在温控器仿真中加入延时功能,使加热器在开启与关闭操作之间保持一定的时间间隔。
COMSOL Multiphysics® 直观的建模环境
仿真,是一件极为强大的工具,借助它可以让您对自己产品的设计性能有直观、全面的了解。研究的物理场或许很复杂,然而却可以在简单的建模环境中进行此类研究。正是以这一理念作为软件设计背后的逻辑,COMSOL Multiphysics® 软件的用户界面(UI)才不断被优化、易用性也在不断提升。在本篇博客文章中,我们从多个相关教学视频中挑选了其中三个具有代表性的视频,希望能为您熟悉建模环境及学习相关工具的使用提供指导。
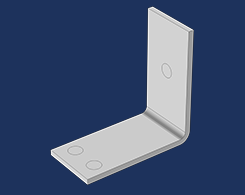
仿真中设置边界条件的方法
假设你正在模拟这样一种情况:在模拟过程中,载荷在不同的网格单元和边界上移动。如果你希望仅对一部分几何边界或只在特定条件下施加边界条件,该怎么处理?在这篇博客中,我们将讨论如何利用 COMSOL Multiphysics 灵活处理这种特殊情况。
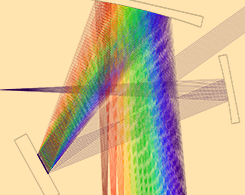
体验 COMSOL Multiphysics® 5.2a 中全新的射线追踪算法
使用新发布的 COMSOL Multiphysics® 5.2a 版本,可以在网格未剖分的域内实现射线追踪,甚至还能释放和追踪几何外的射线。“射线光学模块”提供了一个全新的算法,所涉及的功能远不止上面所提到的,由此您可以轻松准确地模拟射线光学设计。让我们来探讨一下,在建立典型的射线光学模型时,这一新算法会对工作流产生怎样的影响。
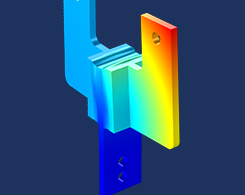
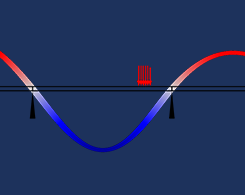
仿真 App: 分析粘弹性结构阻尼器的设计
您是否有在刮风天置身于高楼中,或者看见飞机掠过您的房顶的体验?伴随着那种具有破坏性、并且让您感到不愉快的噪声,可能还会感受到一些低频振动影响了建筑结构的稳定性。解决这一问题的方法之一就是,将阻尼器——特别是粘弹性结构阻尼器纳入结构设计中。通过仿真 App,优化这些设备的方法变得前所未有的简单。
借助仿真 App 优化 5G 和物联网的相控阵天线设计
5G 移动网络和物联网(Internet of Things,简称 IoT)是射频及微波行业的两大热点话题。要想在此类无线应用领域取得新的进展,就需要大幅提升数据传输速率,同时还需在源电子扫描阵列(active electronically scanned arrays,简称AESA)、相控阵天线,以及多输入多输出(multiple-input-multiple-output,简称 MIMO)技术等方面取得重大突破。在上述应用的原型设计和制造过程中,缩短时间和降低成本非常重要。借助仿真和 App,我们便可以缩短无线通信设计的研发周期。

如何在 COMSOL Multiphysics 中实现傅里叶变换
在之前的博客中,我们讨论了如何模拟用于全息数据存储的聚焦激光束。在一个具体的示例中,通过对透镜入口处的电磁场振幅进行傅里叶变换得到由傅里叶透镜聚焦的电磁波。