材料模型 博客文章

如何使用 COMSOL Multiphysics 模拟残余应力
学习如何在结构力学模型中计算残余应力。为了演示,我们使用了一个金属拉深工艺的示例。继续阅读…

非线性材料的热疲劳建模
在模拟非线性材料的疲劳时,有两个挑战。1.) 正确地表示材料的行为;2.)找到一个能够捕捉到寿命控制机制的疲劳模型。

可变形容器中流体的静水压力建模
在之前的一篇博客文章中,我们研究了计算和控制充满不可压缩流体的腔体的体积,其中求解了充满流体的橡胶密封件的静态变形。在那个例子中,假设流体是不可压缩的,我们没有显式地为流体建模,而是添加了一个方程来求解压力。在这篇博客中,我们将扩展这种方法并使之包括可变形容器中流体的静水压力。 挤压水气球 考虑一个装满水的橡胶气球,放在一个开着洞的表面上,同时被压头从顶部推动。气球的变形是由于流体的重量以及压头从顶部向下推动造成的,如下图所示。我们采用超弹性材料模型对橡胶材料进行建模,并将使用在前一篇文章中介绍的技巧,在腔体变形时保持腔体的体积不变。 流体的重量使气球发生变形,这导致气球向外膨胀并陷入凹陷中;来自上方的压缩也会使它产生变形,这导致其向外和向上膨胀。由于这种压缩,气球内流体的深度会发生变化。我们想要求解这种深度变化,而不必求解流体流动的 Navier-Stokes 方程,因为我们只对静态(非时变)解感兴趣。 一个装满水的橡胶气球的中心被压缩。当气球被挤压时,最高点的位置和流体的深度会发生变化,从而改变静水压力分布。 合并静水压力 一个装有流体的容器会对容器壁施加静水压力: p(z)=p0+\rho g (z0-z) 其中,\rho 是流体的密度, g 是重力,z0 是容器顶部的位置,p0 是容器顶部流体的压力。由于气球中充满了不可压缩的流体,当我们用压头挤压它时,压力 p0,将会增加。 我们还可以从上面的图像中看到,随着气球被压缩,流体的深度也会发生变化。此外,似乎计算深度需要知道容器的顶部和底部的位置。那么,我们如何在深度上融入这种变化呢?接下来,让我们来看看怎么操作…… 如下图所示,气球内部施加的压力载荷有两个分量。压力载荷的第一部分是根据全局方程计算的。压力载荷的第二部分是由静水压力引起的。理想情况下,第二部分的压力载荷将基于流体的深度,但这个深度是一个我们不知道的变量。所以,我们输入一个只基于z位置的静水载荷,它可以有一个任意的零水平。 施加在气球内边界上的压力载荷是由全局方程计算出的压力载荷和静水压力之和。流体静压在求解过程中逐渐升高。 全局方程约束体积在变形过程中保持不变。 因此,这里看起来好像我们施加了一个压力载荷来约束体积和一个与 z 位置成正比的载荷,但是我们没有正确地计算静水压力,因为我们不知道 z0. 然而,事实证明,全局方程的作用可能比你最初预期的要多一些。 为了理解这一点,我们稍微重写了一下气球内部压力的方程: p(z)=(p0+\rho g z0)-\rho g z 我们马上就可以看到,这几乎与我们输入的压力载荷方程 p(z)= P0-\rho g z 完全匹配,除此之外可以看到,我们通过全局方程计算的压力是容器顶部的压力加上未知的顶部 z 位置的偏移量。所以,虽然我们只求解一个额外的变量 P0,但它解释了两种物理效应:由于体积约束引起的压力变化以及流体顶部 z 位置的变化。 由于这个模型包含几何和材料非线性以及由于接触引起的非线性,因此收敛到解可能很困难。为了解决这个问题,我们将使用负载递增来缓慢增加重力对模型的影响,并逐渐挤压气球。二维轴对称模型用来研究结构的对称性。 最大耦合算子被用于寻找腔内的最高点,以便进行后处理。 求解模型后,利用最大耦合算子对静压的大小进行后处理,计算沿气球内边界的最大z位置。 箭头表示随深度变化的静水压力载荷的解。 上图显示了气球内部的静水压力负荷。箭头的长度由以下表达式给出: WaterDensityg_const(maxop1(z)-z),其中 maxop1(z) 给出变形腔顶部的z位置。 结束语 在今天的示例中,我们对可变形容器(本例中是气球)中流体的不同深度进行了模拟。全局方程用于求解体积保持不变的流体压力,同时也考虑了气球变形时流体深度的变化。 通过使用这种方法,我们不需要显示地求解 Navier-Stokes 方程,就可以解决流固耦合问题,从而节省了大量的计算资源。如果您对这种类型的模型感兴趣,或想了解更多关于这种模型的细节,请与我们联系。

封闭腔体积的求解和控制
在 COMSOL® 软件中,有多种方法可以模拟流体与固体的相互作用。例如,可以使用完整的纳维-斯托克斯方程对压力场和流体速度场进行显式建模。尽管这种方法非常准确,但对于一些流-固耦合问题来说,它的计算成本比实际需要的要高得多。今天这篇文章,我们将介绍一种模拟包含不可压缩流体的封闭腔的方法,假设通过流体的动量和能量传递很小。 编者注: 作者撰写这篇博客的时候,COMSOL 中还没有计算封闭腔中流体载荷的功能。现在,COMSOL Multiphysics® 6.2 版本新增了封闭腔功能,可用于计算封闭腔中的流体载荷。 模拟封闭腔中的流体 我们来看一个 COMSOL 案例库中的示例:超弹性密封条的压缩模型。这个示例考虑的是压缩的软橡胶密封件的横截面。腔体中封闭的流体是空气。该示例计算了压缩力,并将密封件中考虑压缩空气影响与不考虑压缩空气影响的结果进行了比较。 软橡胶密封件的压缩模型。仿真结果显示了应力和应变。使用了不同的方法对密封件内部的空气进行模拟。 示例模型将空气视为可压缩流体,计算了随此二维示例中密封件的横截面积 A 变化的腔体内部压力 p 的变化。接下来,让我们来看看它是如何实现的。将腔体内的空气视为绝热压缩下的理想气体,则压力-密度关系为: \frac{p} {p0}=\left(\frac{\rho} {\rho0} \right)^\gamma=\left(\frac{A0} {A}\right)^\gamma 所以,要计算压力的变化,只需要知道面积的变化就可以了。假设未压缩密封件的面积和压力,以及比热率 \gamma均已知,如何计算横截面积呢?该面积由一个我们甚至不想考虑在模型中的区域来描述。使用高斯定理将面积积分转换为边界积分: A=\int\Omega 1 d\Omega = \int\Omega \left( \nabla \cdot \left[ \begin {array} {c} x \ 0 \end {array} \right]\right) d\Omega = \oint x nx d\Gamma 其中,x 是变形的密封件构型的 x 坐标,n_x 是边界的向外法向量的 x 分量,也在变形配置中,由此给定密封件的封闭区域。这是通过一个定义在封闭体积的完整内部边界上,名为 AreaInt 的积分耦合算子 完成的。变形区域由在“完整模型”上定义的变量 EnclosedArea 定义。 在密封件的内边界上定义面积积分。 分别定义封闭面积和内部压力的变量的定义。必须使用负号来计算面积,因为固体的法线指向腔体。 计算出的变形面积用于确定密封件变形时内部压力的变化。计算得出的压差作为一个载荷施加到密封件内部。要查看上述方法的完整操作,请查看超弹性密封条模型文档。 考虑不可压缩流体 上述方法假设流体是可压缩的,并且密封件的内部压力与面积变化呈函数关系。但如果流体是不可压缩的呢?假设考虑的不是包含可压缩空气的密封件,而是一个充满水的气囊,其中水几乎是不可压缩的。那么,随着结构的变形,封闭的面积不能改变,上述方法就行不通了。因此,我们需要一个替代方案。 我们将 全局方程 功能添加到固体力学接口,通过在这个模型中引入一个额外的方程来求解流体内的压力,使体积不会发生变化。我们来看看这个接口: 引入的全局方程的设置。需要启用高级物理选项才能查看此功能。 上面的屏幕截图显示了用于额外变量 压力 的 全局方程 设置。此方程成立的条件是变量 封闭区域 等于初始面积 123.63 […]
建立子模型:如何分析大型模型中的局部效应
你有没有碰到过对一个具有大量边界条件的特别大的结构进行建模?了解如何使用子模型,这是在COMSOL Multiphysics®中分析大型模型局部效应的一种建模技术。
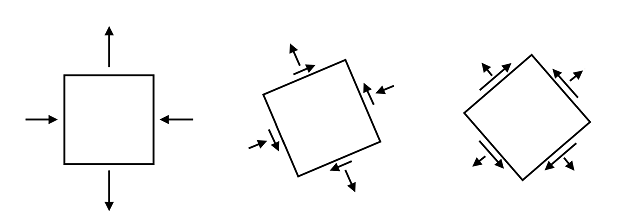
使用临界面法预测疲劳
对疲劳的研究始于 19 世纪,起因是铁路车轴发生故障从而导致了火车事故。在旋转轴中,应力的变化是从拉伸到压缩,再回到拉伸,由于应力状态是单轴和成比例的,因此载荷历程很简单。