当今时代,虽然我们大多数人都不是名人,但是比以往任何时候都更频繁地出现在镜头前。智能手机、电脑和其他配备微型相机模组的设备几乎无处不在,无论我们是否准备好拍特写!随着配备微型相机模组的产品不断快速发展,这些小巧但功能强大的光学设备也必须不断改进。为了确保微型相机模组能够在有限的成本和空间内产生清晰的图像,工程师可以通过射线追踪仿真来分析其性能。
帮助定义相机和微型相机模组性能的因素
即使是最先进的微型相机模组,也与传统相机和其他光学系统有一些相同的关键属性。光学系统是由几何结构(透镜、反射镜、光圈、棱镜等的位置、方向、厚度和曲率),以及结构中使用的材料定义的。为了分析光学系统,设计者正在努力尝试量化与理想系统之间的偏差,也称为像差。更详细地考虑其中一些因素对理解微型相机模组设计的独特挑战具有一定的帮助。
球面像差
光的传播速度取决于它所通过的介质,例如玻璃、塑料、水或空气。如果介质在其整个体积内具有均匀的特性,光将以直线的方式传播。当光线照射到不同材料相交的界面时,其传播方向会发生变化。这种路径的改变称为折射,当透镜折射光线时,会导致生成的图像失真。当透镜的表面被均匀地弯曲时,类似于球体的一部分,就会产生一种称为球面像差的扭曲。
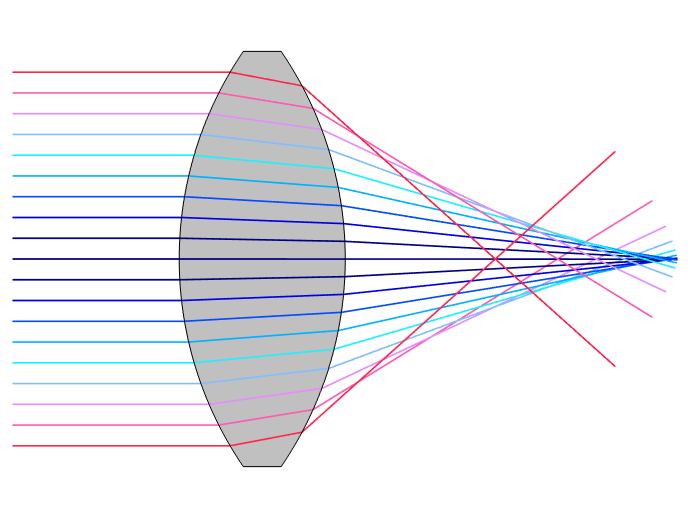
穿过球面透镜边缘的光线指向与穿过中心的光线不同的焦点。为了抵消这种球面像差,可以将透镜制成非球面形状或与其他透镜结合使用,以将光线重新定向到图像平面上的预定位置。
发生球面像差是因为穿过球面透镜边缘的光线与穿过中心的光线具有不同的焦点,导致生成的图像模糊不清。为了消除这种影响,可以通过改变镜片表面的曲率来重新引导光线并保持清晰的焦点。由于这种透镜的变化曲线轮廓不再是球面,因此称为非球面透镜。另一种减少球面像差的方法是使用多个透镜来实现所需的放大倍数。相机常常由多个透镜组成,用于在有限的设备尺寸内获得尽可能清晰的图像。
焦比
在任意光学系统中,焦距 f 与物镜直径 D 的比值 称为 焦比,在摄影领域通常被称为 f 数。(详请参阅下文对这些概念的说明。)f 数对图像的景深具有直接影响,f 数越低,表明相对于焦距的光圈越大,导致景深变浅。也就是说,即使图像的某一部分处于清晰对焦状态,离镜头更远或更近的其他物体也会显得模糊。如果保持焦距不变但减小光圈,系统将捕捉到更小、更清晰的整体图像。
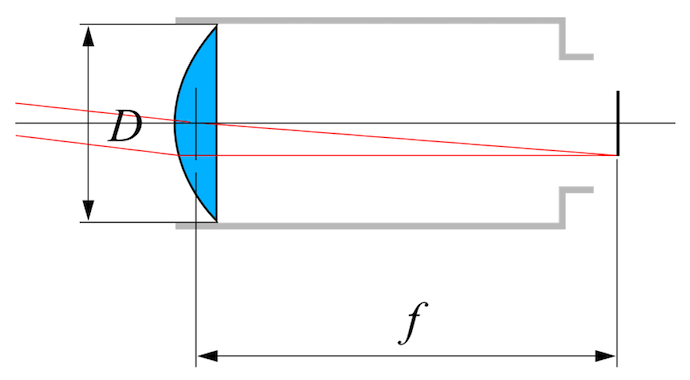
焦比是影响光学系统性能的一个重要参数。焦比值由焦距 f 与物镜直径 D 之比定义,即镜头与图像观察面之间的距离。图片由 Vargklo 提供,通过 Wikimedia Commons 在公有领域共享。
对于拍摄野生动物和体育赛事的相机而言,尺寸对焦比的影响则更明显。这些相机通常有非常长的广角镜头,以便以最大的景深捕捉尽可能多的场景。
从相机到微型相机模组:光学设计的演变
虽然现代微型相机模组与传统相机的很多核心单元相同,但也受到其他设计限制。最明显的限制为:微型 相机模组必须保持结构紧凑。由于微型相机模组通常被集成在手机、平板电脑和其他便携式产品中,因此它们的镜头组件通常比传统相机的镜头更小、更轻。由于电子设备市场对价格高度敏感,制造商也在保持微型相机模组紧凑性的同时,也面临着降低制造成本的压力。
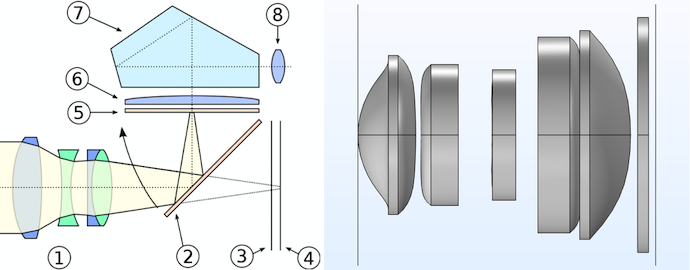
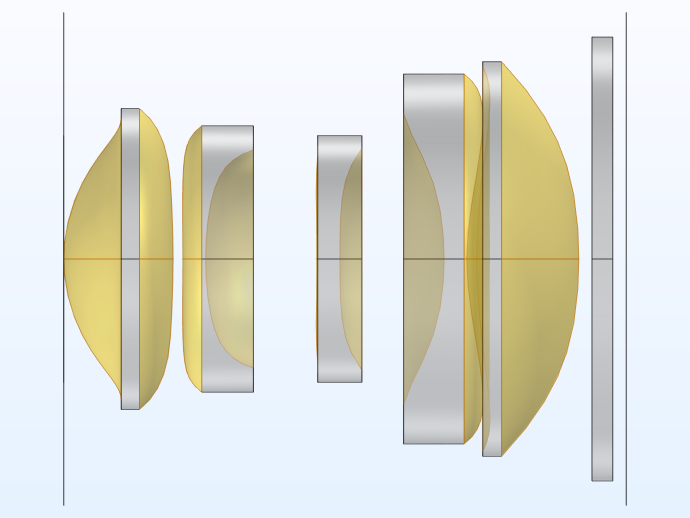
左图:典型数码单反相机的组件示意图:1. 镜头组件;2. 反射镜;3.焦平面快门;4. 传感器/胶片;5.对焦屏;6. 聚光镜;7. 五棱镜;8. 目镜。图片由 Cburnett 提供,通过 Wikimedia Commons 共享,获得(CC BY 3.0)许可。右图:由射线光学模块中的案例模型定义的微型相机模组镜头组件。典型的微型相机模组中不包含典型数码单反相机中的许多光学组件。
所有这些因素都反映在微型相机模组的设计和构造中,尤其是与常见的数码单反相机设计相比时。数码单反相机通常将包含一个可拆卸的透镜组件与 35 毫米胶片尺寸相同的图像传感器,以及一系列安装在透镜/图像传感器组件上方的取景目镜。这种配置使摄影师能够看到相机捕获的准确图像。
在微型相机模组中,一些组件的尺寸被缩小,而其他组件则完全省略了。例如,没有取景器组件。该模组的图像传感器小于 35 毫米,覆盖传感器表面的单个接受器或像素也相应减小。(这就是为什么在比较数码相机的百万像素值时,必须注意像素尺寸的差异可能带来的误导!)微型相机模组透镜组件的直径和厚度都很小,因为它不能像单反相机那样从外壳中伸出。此外,它的部分或全部透镜由塑料而非玻璃制成,以降低成本和重量。
克服微型相机模组设计的限制
设计上的限制使得图像的清晰度很难在微型相机模组中实现。例如,在配备大型凸透镜组件的单反相机上,可以通过物理调整焦距和缩小光圈来调整焦距比。然而,在微型相机模组上,进一步缩小光圈是不现实的(因为它的尺寸已经很小)。这意味着,光线在穿过微型相机模组组件时,会发生更剧烈的弯曲,从而增加了所产生图像的潜在失真可能性。
对于微型相机模组的设计者而言,如何充分利用小型塑料透镜,并在调整范围有限的情况下将它们紧紧地组装在一起呢?如上所述,可以通过调整透镜的形状和数量来优化其性能。玻璃非球面透镜的复合曲线通常比具有规则曲率的透镜更昂贵,但在这里,使用塑料透镜更有优势。塑料透镜可以从单个模具中大量生产,避免了将玻璃透镜研磨成非球面形状这一昂贵且耗时的过程。
除了这些积极的影响,非球面光学元件也为优化系统性能工作带来了更多的复杂性。卡尔蔡司的一名工程师在其2012 年发表的一篇研究文章中,说:
“微型相机模组设计主要受高非球面像差校正的驱动,来获得尺寸和成本限制。因此,为了控制高阶像差贡献,必须在瞳孔和场坐标中进行适当的采样……大量的高度非球面导致微型相机模组的错位灵敏度增加,相应地对技术要求提出了更高的标准。”
射线追踪是一种用于调整微型相机模组紧密排列的、高度非球面透镜组件特性的宝贵工具。
通过仿真计算像差
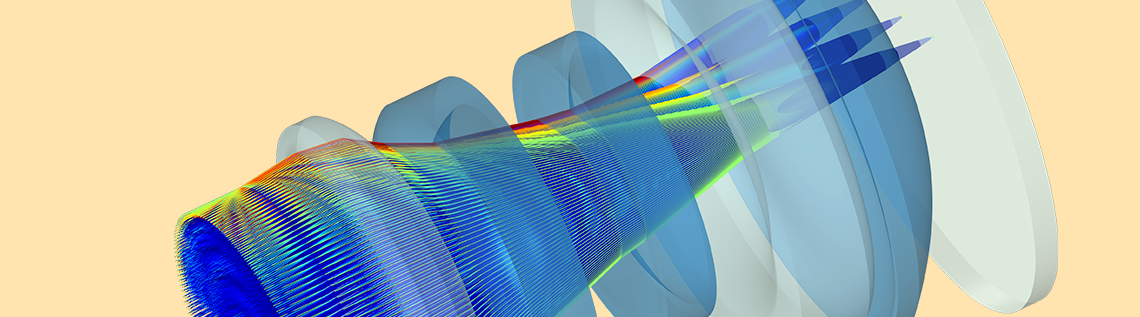
我们可以使用 COMSOL® 软件附加的射线光学模块内置零件库中的非球面均匀透镜 3D 零件,并构建一个五元件(加滤波器)微型相机模组组件的模型。这个模型支持射线追踪分析,用于识别和可视化影响微型相机模组图像质量的潜在像差。如下图所示,这个教程中模拟的组件具有 7.0 毫米的焦距和 f/2.4 的焦比。
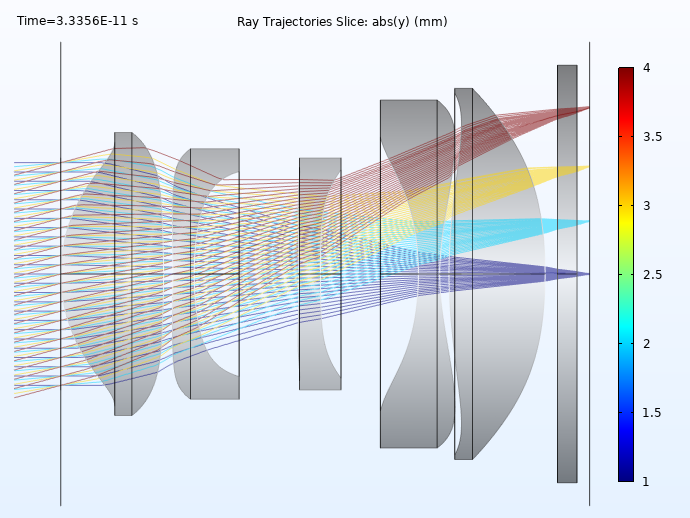
微型相机模组光学设计简图。在这个横截面视图中,射线已经按释放指数着色。
几何光学接口 使用的射线追踪算法通过底层有限元网格,基于离散化的几何形状来计算折射光线的方向。针对微型相机模组的非球面表面,我们采取了一种累积选择的方法,以便在这些表面上对网格进行细化。
请注意,COMSOL Multiphysics 中弯曲边界单元的表示实际上可以被设置为不同的形函数阶次。例如,软件可以将边界单元视为分段三次或四次多项式,以提高模拟精度。这有助于抵消从光学设计到有限元网格表示过程中可能产生的离散化误差,这一技术优化对于确保透镜系统模拟的精确性和可靠性具有重要意义。
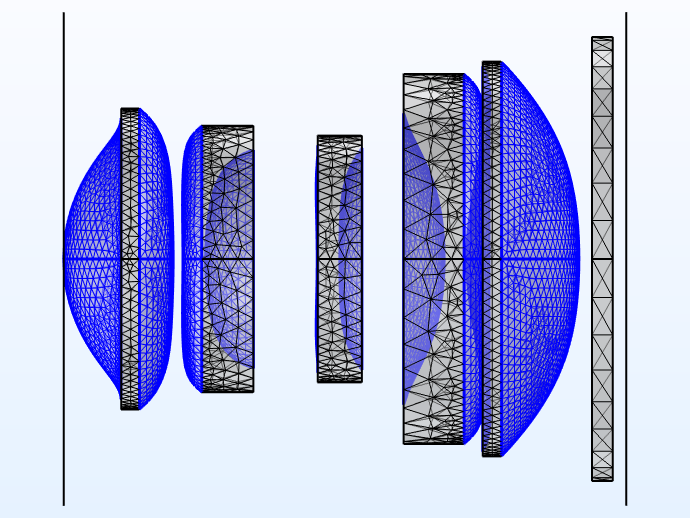
左图:微型相机模组模型的透镜表面的累积选择。右图:网格经过细化后的非球面。
微型相机模组的射线图和点图如下所示。透镜表面的渲染基于材料折射率的表达式,并且射线已根据距图像平面上每个发射点的质心到中心的径向距离进行了着色。在点图中,射线根据它们与入瞳中心的径向距离进行着色,这为观察最异常光线的来源提供了一种方法。


左图:微型相机模组的光线图,其中光线按其与图像平面上的质心之间的径向距离为依据进行着色。右图:根据距入瞳中心的径向距离着色的点图。
微型相机模组的教程模型
如果您想要进一步探索如何使用COMSOL优化微型相机模组性能,可以尝试自己模拟。单击下面的按钮,下载免费的教程模型:
评论 (0)