
高还原度的齿轮几何模型,对于执行耦合了其他物理现象的多体动力学仿真而言帮助巨大。考虑到这一点,COMSOL 在“零件库”中提供了很多内置零件,帮助用户免去手动创建几何体的麻烦。有了这些高度参数化的齿轮零件,创建多种多样的平行轴线齿轮和行星齿轮系变得更加得心应手。请阅读本文了解到如何使用不同类型的内置零件创建一个“多体动力学模块”中高还原度的齿轮模型。
内置齿轮零件的优势
虽然从理论上讲,我们能够在仿真中通过精确模拟齿轮间的接触相互作用,对机械装置进行分析。然而,若将此方法应用于多体动力学分析,计算时间会相当长。一个更好的方法是引入数学公式来模拟齿轮之间的接触和相互作用。
借助相应的公式,我们能创建出高还原度的齿轮几何模型,为执行瞬态和频域研究提供精确的惯性属性。除此之外,“零件库”中的齿轮几何也可用于计算静态接触分析中齿轮的啮合刚度,并且适用于多物理场的耦合模拟。需要注意的是,虽然并未对齿轮的啮合刚度进行有限元分析,但是这种刚度仍然客观存在于成对的齿轮齿接触中。在多体动力学分析中加入真实齿轮几何的另一个好处是:在建立物理场或执行后处理时,可以展示出更好的视觉效果。
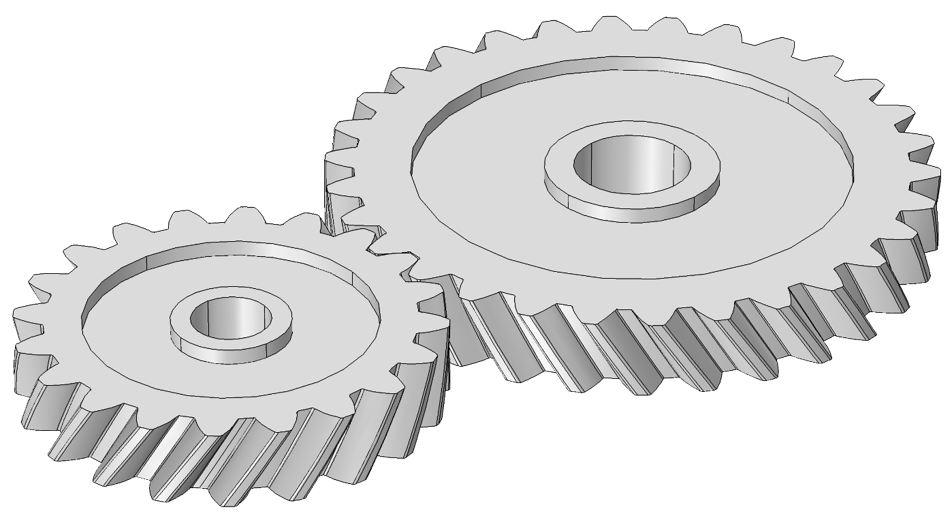
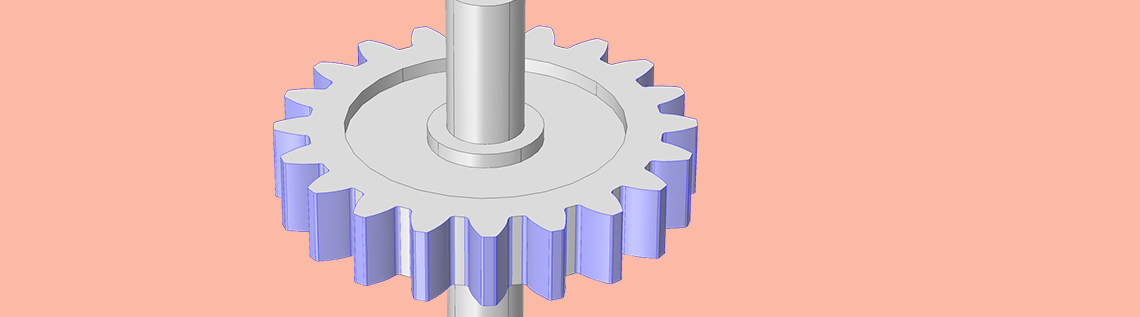
使用“零件库”创建斜齿轮副几何模型。
虽然可以手动建立几何体,但使用内置零件会让工作变得更加简单、高效。这些零件本质上是参数化的,这意味着只需简单地调整几何参数,就可以改变零件的形状,包括自由添加轴和圆角等多个特征。这些零件经历了大量检验,验证输入数据以及齿轮、轴和接触边界等选择的有效性,这些检验步骤确保了零件的性能更加接近物理实体。在“零件库”的帮助下,指定齿轮的位置和方向、使齿轮啮合与配对的齿轮对齐等操作变得非常简单。这些零件还包含鲁棒性几何操作,在创建复杂的齿轮几何形状时十分好用;此外,我们还可手动更改零件的几何操作。
“零件库”中齿轮零件分为三类:外部啮合齿轮,内部啮合齿轮与齿条。如您希望了解“零件库”中有关齿轮零件的更多信息,请阅读齿轮模拟系列的博客文章。
基于单个齿轮构建齿轮系
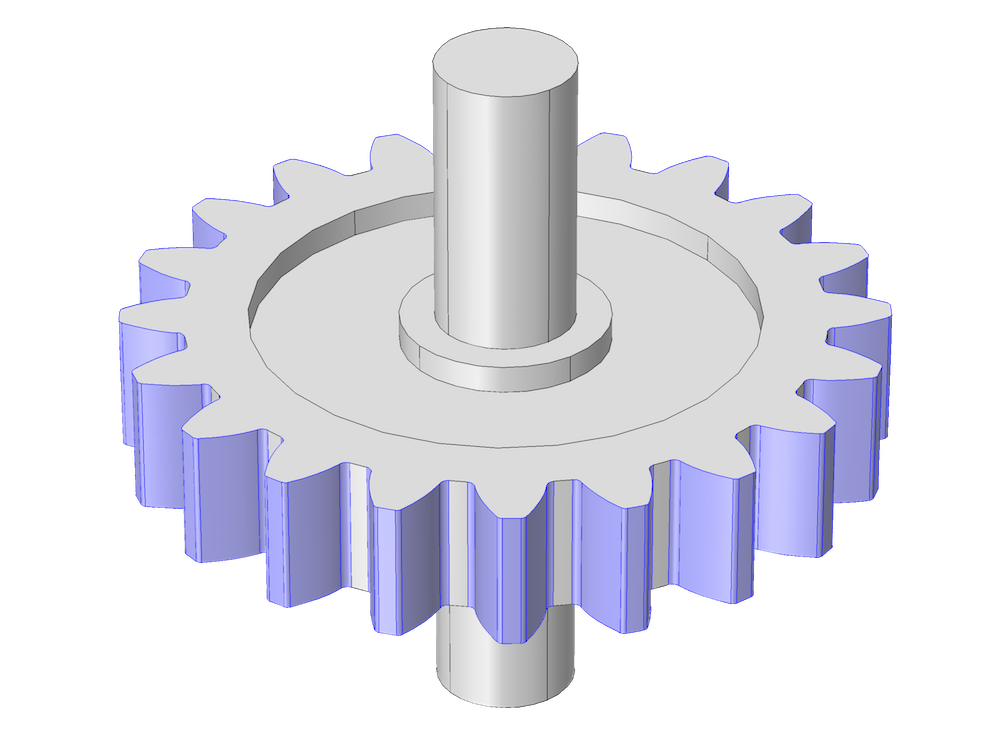
“零件库”中的齿轮基本上都是单个齿轮或齿条,但在真实的应用条件下,齿轮一般都是成对使用。为此,我们要用单个的齿轮零件来构建齿轮系。为了清晰地解释构建步骤,我们将使用以下二维直齿轮副作为示例。已知的物理量如下:
- 第一个齿轮的位置(x_1,y_1)
- 第一个齿轮的节圆半径(r_1)
- 第二个齿轮的节圆半径(r_2)
- 第二个齿轮的角位置(\theta)
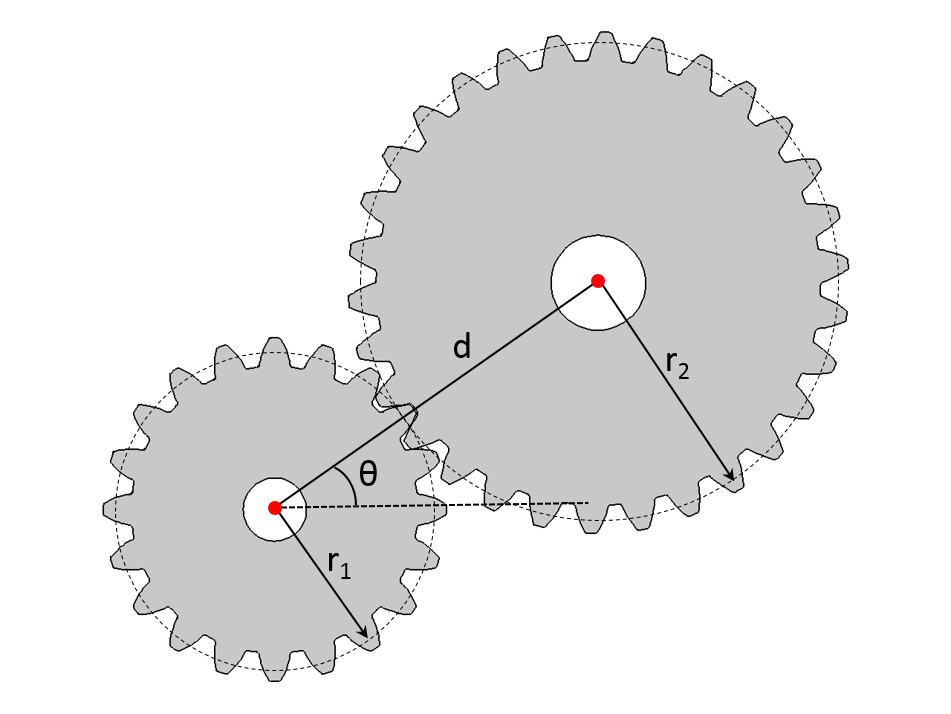
直齿轮副示意图,图中显示了两个齿轮的中心距和第二个齿轮的角位置。
为了将第二个齿轮设置在适当的位置,首先需要计算中心距 d:
将第二个齿轮的位置(x_2,y_2)定义为:
将第二个齿轮放置在正确的位置上后,下一步是对准两个齿轮的轮齿,在此示例中则称为啮合。具体方法是,将第二个齿轮在旋转中的啮合对齐角 \theta_a 定义为:
其中 \theta_{m1} 和 \theta_{m2} 分别表示两个齿轮的啮合周期,其表达式为:
其中 n_1 和 n_2 分别表示第一个和第二个齿轮的齿数。
计算完第二个齿轮的位置以及啮合对齐角后,我们将它们作为表达式或数字添加到第二个齿轮的输入参数栏中,如下图所示:

二维直齿轮零件的输入参数,红框内的参数为齿轮中心和啮合对齐角。
设立齿轮参数
在此示例中,我们使用渐开线曲线来定义齿廓。每一种齿轮应用都有其独特的齿形和尺寸,因此对于不同的应用,须选择相应类型的齿轮齿。以下输入参数可用于控制齿轮齿的形状和尺寸:
- 齿数(n)
- 分度圆直径(dp)
- 压力角(\alpha)
- 螺旋角(\beta)
- 齿顶高与模数比(adr)
- 齿高度与齿顶高比(htr)
- 齿隙与分度圆直径比(blr)
- 齿顶圆角半径与分度圆直径比(tfr)
- 齿根圆角半径与分度圆直径比(rfr)
若这些位置上不需要圆角,那么可以将齿顶圆角半径或齿根圆角半径设为零。
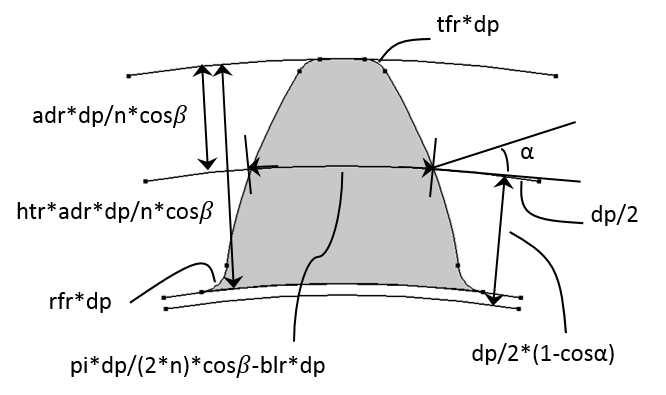
控制外部轮齿的各个输入参数。
大部分输入参数之间存在一定的物理关系,通过搭配使用这些参数能使几何结构具有更好的扩展性。我们可以利用这些输入参数计算出多个齿廓参数:
- 法向模数:m = dp/n*cos\beta
- 齿顶:ad = adr*m
- 齿高度:ht = htr*m
- 齿根高:dd = ht-ad
- 基圆直径:db = dp*\cos\alpha
- 齿顶圆角半径:tf = tfr*dp
- 齿根圆角半径:rf = rfr*dp
- 节圆处的齿厚度:t = \pi *m/2 -blr*dp
针对一些特殊的应用,须采用相应特定类型的齿轮齿。对于高速齿轮装置而言,高压角齿轮更为适合,因为其磨损率小于标准齿轮齿廓的磨损率。同时高速齿轮装置中还需专门留出齿隙,为轮齿之间的润滑油膜留出空间,防止齿轮过热和轮齿损坏;另一方面,在仪器、机床和机器人等精密设备中,应当避免出现齿隙,因为这些装置中的齿隙会导致输入轴和输出轴之间出现空转,从而难以实现准确的定位。

具有不同压力角和模数的齿轮。左图:具有标准齿廓的齿轮。中图:大压力角齿轮。右图:大模数齿轮。
齿轮毛坯和轴的几何模型
探讨完齿轮齿的细节后,我们来看一下影响齿轮形状和尺寸的其他参数。齿轮的几何结构可分解为三个零件:齿轮齿,齿轮毛坯和轴。齿轮轴的相关参数如下:
- 齿轮宽度与分度圆直径比(wgr)
- 环宽度与齿轮宽度比(wrr)
- 环外径与齿根直径比(dorr)
- 环内径与孔径比(dirr)
虽然轴并非齿轮的组成部分,但我们可以用内置齿轮零件在齿轮中心添加一个轴,齿轮的轴向位置可以与轴重叠。
- 轴长与分度圆直径比(lsr)
- 轴中心的相对轴向位置(zs)
在默认设置下,齿轮位于原点,其轴被设置为 z 轴,我们可以通过下列参数控制齿轮的位置和方向:
- 齿轮中心(\{xc, yc, zc\})
- 齿轮轴(\{egx, egy, egz\})
为了使齿轮啮合与啮合齿轮对齐,我们采用了啮合对齐角参数,以使齿轮围绕自己的轴线旋转。
- 啮合对齐角(th)
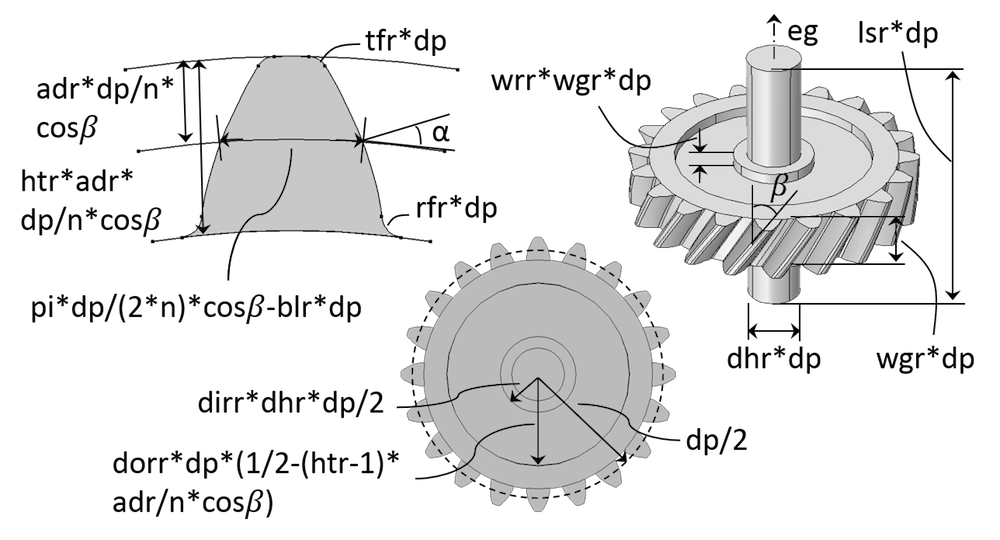
斜齿轮几何结构示意图,图中显示了多个输入参数。
上图中的输入参数和齿轮齿的输入参数一样也存在物理关系,我们可以利用这些输入参数计算齿轮参数,它们包括:
- 齿轮宽度:wg = wgr*dp
- 齿环宽度:wr = wrr*wg
- 齿环外径:dor = dorr*dr
- 齿环内径:dir = dirr*dh
- 轴长:ls = lsr*dp
在默认设置中,齿轮几何会应用一组特征。其中一些特征是可选的,只要将对应的输入参数设为零,即可移除它们,建立如下图所示的不包含轴、齿轮坯环、中心孔、齿尖圆角和齿根圆角的齿轮几何模型。
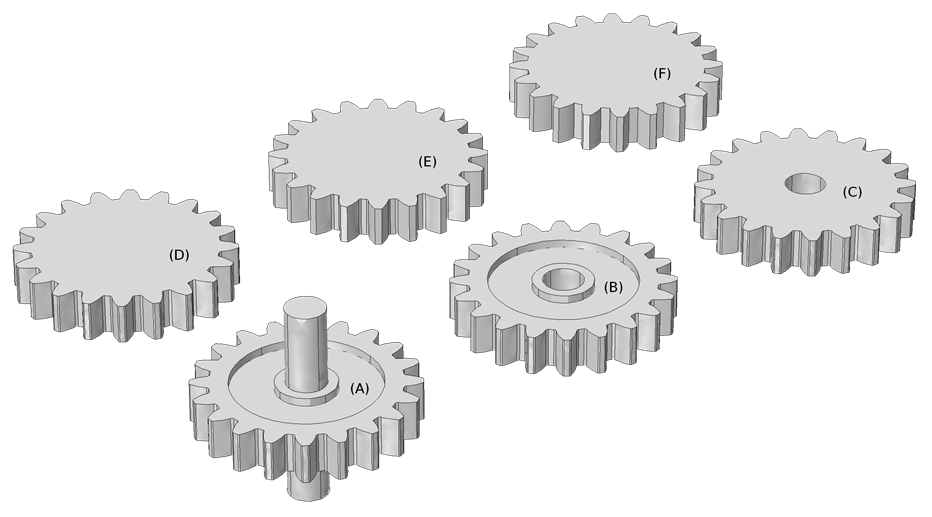
按照从(A)到(F)的顺序依次从直齿轮几何模型中移除了相应的可选特征。(A)默认的几何结构;(B)移除了轴;(C)移除了齿轮坯环;(D)移除了中心孔;(E)移除了齿尖圆角;(F)移除了齿根圆角。
在所有内置齿轮零件中,齿轮毛坯的形状都是一样的,不过我们可以通过移除齿轮材料在毛坯创建一个环。若想自行改造齿轮毛坯的形状,我们需要手动对内置零件的几何执行多次操作。
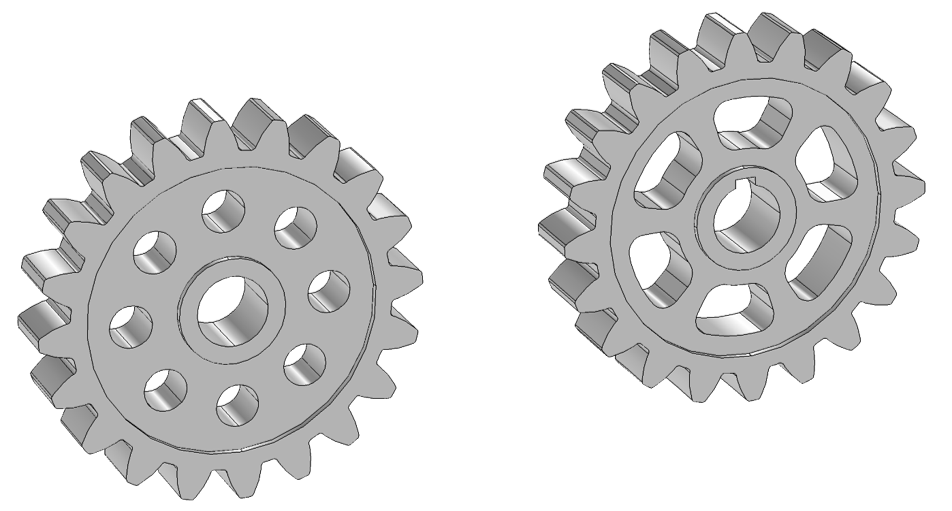
带自定义毛坯的齿轮。
齿轮零件库中的选择
内置的齿轮零件提供了许多选择,可以方便我们对物理场或后处理进行设置。这些选择除包含齿轮零件外,还有齿轮齿的边界。通过应用这些边界,我们可以模拟两个齿轮之间的接触。
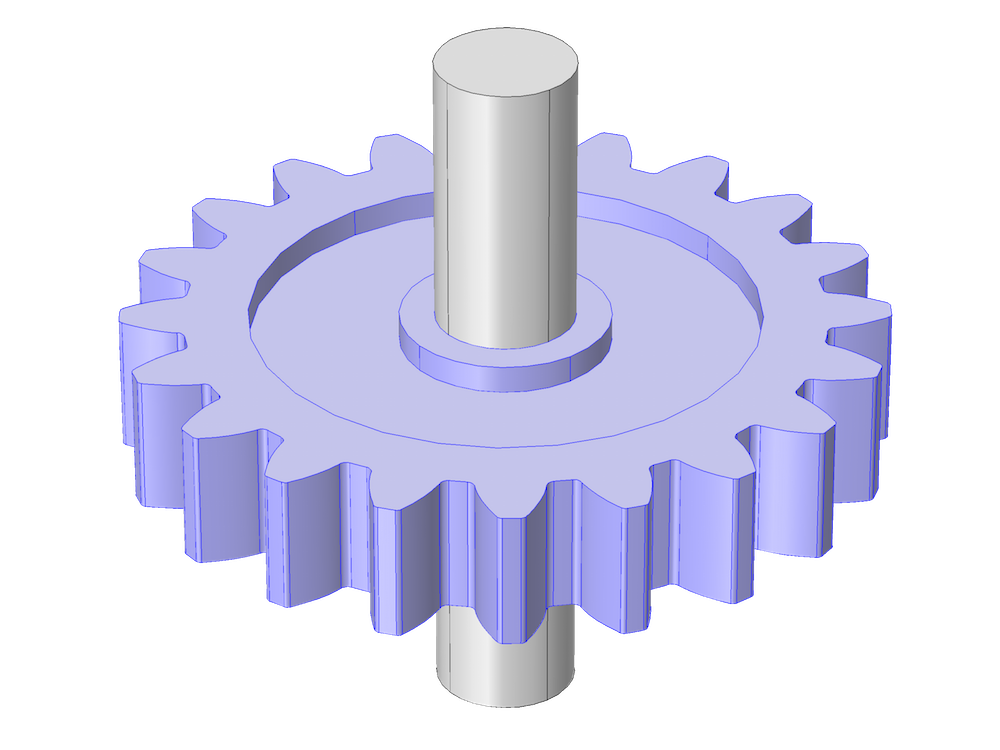
直齿轮的几何模型。左图突出显示了除轴以外的齿轮结构;右图突出显示了除齿轮齿边界和轴以外的齿轮结构。
检验及验证输入数据
软件中的齿轮零件是高度参数化的,所以一定要进行大量检查来验证输入数据。检查的目的是确保输入参数无论是独立使用,还是与其他参数组合使用时均正确无误。检查步骤应当在构建几何前进行。
当一组输入参数无效时,页面将提示对应的错误消息。举例来说,外齿轮的必要几何检查包括:
- 齿顶检查:ad<=(dp-db)/2
- 齿根检查:(2*dd/dp)<=0.9
- 孔径检查:dh<(dp-2*dd)
接下来,让我们了解一些基于内置零件创建的齿轮几何结构的示例。
应用案例:差动轮系
第一个示例是汽车中的差速轮系机构,轮系的左轴和右轴具有不同的旋转速度。差速轮系在工作状态下会用到五对锥齿轮(总共六对)。
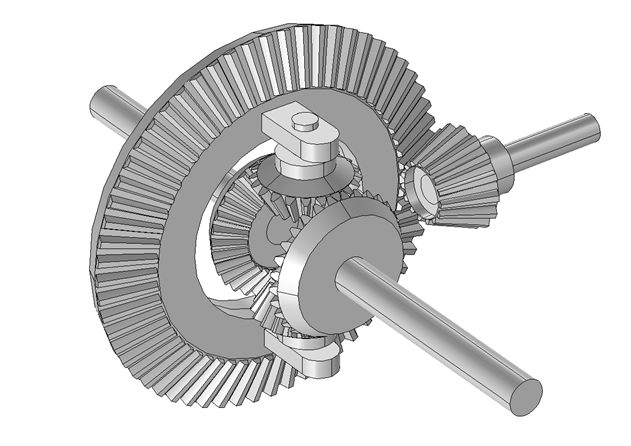
差动齿系机构的几何模型。
应用案例:三级风机齿轮箱
下面将介绍的示例是三级风机齿轮箱。第一级是行星齿轮系,它包含三个行星齿轮、一个太阳齿轮和一个环形齿轮。第二级和第三级是相互平行的齿轮系,每个齿轮系都由一对齿轮组成。该齿轮箱在运转时会使用到八对(总共九对)斜齿轮。此类齿轮箱的典型齿轮比从 50 至 100 不等。
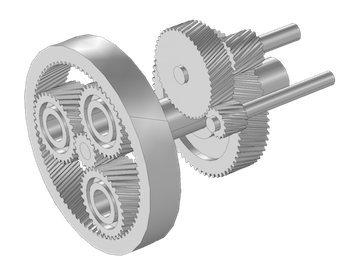
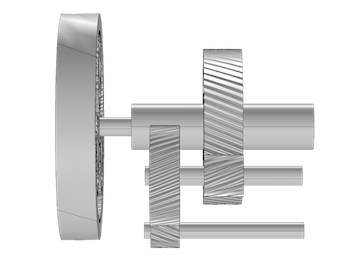

风机齿轮箱的几何模型及其顶视图与前视图。
结束语
齿轮是一类可以传递运动和动力的机械元件,在汽车和风力涡轮机等各式各样的机械中均具有广泛的应用。借助 COMSOL Multiphysics 的新功能,我们可以高效地建立齿轮几何模型。利用这些强大、高度参数化的内置零件,可以自由地更改齿轮的形状,从而设计出适合特定应用的齿轮几何模型。
在“齿轮模拟”系列的下一篇文章中,我们将向您展示如何模拟变速箱的噪声和振动,敬请期待!此外,我们还为您准备了以下资源。
学习更多关于齿轮建模和多体动力学模块的知识
- 查看齿轮模拟系列中的其他博客文章
- 有兴趣学习多体动力学建模吗?请阅读“COMSOL 博客”中的相关文章
- 访问发布亮点页面,深入认识 COMSOL Multiphysics 5.2a® 版本新发布的齿轮建模特征和功能
评论 (1)
桂涛 陈
2023-04-15可以提供一下三级风机齿轮箱的案例吗