最新内容
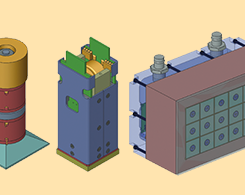
ETREMA 公司使用仿真技术分析磁致伸缩材料
ETREMA Products 公司的研究人员在 COMSOL Multiphysics® 中对磁致伸缩材料进行了单物理场和多物理模拟研究。阅读博客,获得完整的用户故事。

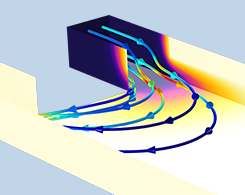
借助 App 快速准确地分析声反射
对于许多工程领域,研究声的反射与吸收非常重要。仿真是进行此类分析的宝贵工具,它能够清楚地解释声波是如何与周围物体的表面发生相互作用的。今天,我们将以水-海床界面的声反射为例,了解“App 开发器”如何使该领域受益于仿真的强大功能。
App 开发器用作教学工具
充分提高学习效率,同时使学生保持学习热情,这是教授们希望在所有课程中实现的共同目标。 在以物理和工程学为基础的课程领域,仿真 App 通过简化方式向学生介绍复杂概念,从而帮助教授实现这一目标。以下,让我们来看看大学教授们在课堂中使用 App 的一些创新方式。
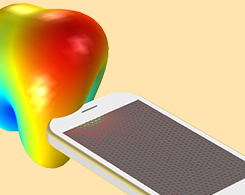
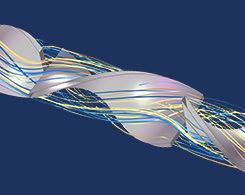
促进 5G 移动网络的发展
请设想一下“理想”中的无线网络:每当拿起通讯设备时,都可以获得极佳的网络信号品质和超高的数据下载速度,无论我们身在何处,都可以与世界上任何一个位置紧密地联系在一起。这样一个理想的无线网络,最重要的是一定要可靠——不会造成通话中断、信息无法送达及网页打开延迟。为了满足 5G 这一理想网络的特殊性能要求,工程师们正在考虑通过特定的射频设计,将这种技术变成现实。
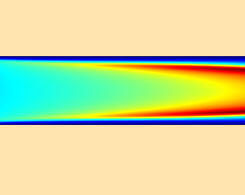
仿真分析管式反应器中的解离过程
通过模拟管状反应器中的解离过程,有可能产生一个更有效和准确的设计。继续阅读本文,了解更多内容。
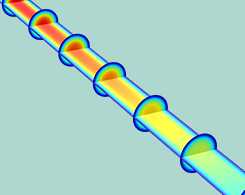
通过仿真研究歧管式微通道热沉
当电子设备过热时,就存在引起火灾的风险。尽管有热沉这类冷却元件专门用来防止这种意外发生,但也无法及时跟上一日千里的技术发展。而通过仿真,可以阐明各种热沉设计的卓越传热性能,以及如何通过添加歧管式微通道 (MMC) 等元件来提高性能,从而为上述问题提供解决方案。今天,我们将利用仿真来探索 MMC 热沉的工作方式。

使用多物理场仿真研究激光与材料的相互作用
为了减轻对高功率激光系统的损害,来自劳伦斯-利弗莫尔国家实验室的一个研究团队使用多物理场仿真来研究激光与材料的相互作用。
第二部分:可提升用户工作流的仿真 App 设计技巧
在本系列博客的第一部分中,我们重点讨论了如何设计出结构清晰、外观整洁的用户界面。今天,我们将介绍一些仿真 App 的设计技巧,帮助您提升工作流和用户体验。请阅读本文以了解如何利用 App 结构、工具提示和警告消息等提供的信息,来提升仿真 App 的用户工作流。