多体动力学模块更新
从 COMSOL Multiphysics® 软件 5.5 版本开始,您可以在脱离“结构力学模块”的情况下独立使用“多体动力学模块”。该模块的新功能和改进功能包括滚子链轮总成建模,以及根据几何图形自动创建刚性域和齿轮。请阅读以下内容,进一步了解这些多体动力学特征。
COMSOL Multiphysics® 的附加模块:多体动力学模块
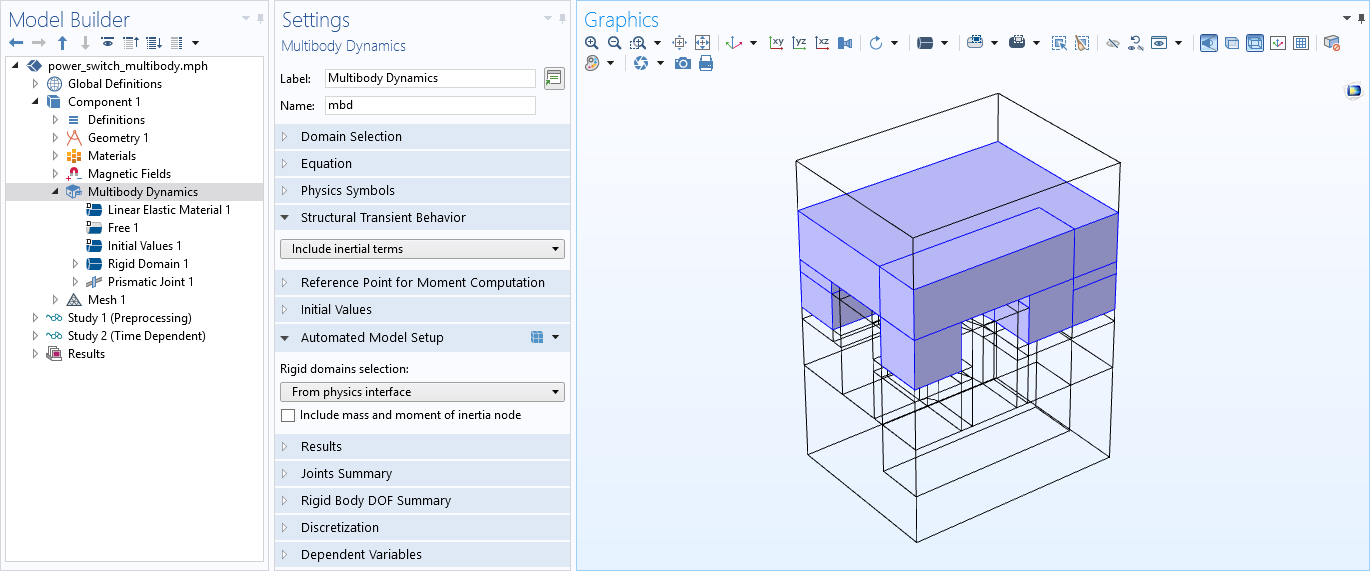
在 5.5 版本中,“多体动力学模块”成为了 COMSOL Multiphysics® 的附加模块,现在可以单独使用,而不再需要“结构力学模块”。这一功能变化使更多用户可以更加灵活地进行多体动力学建模,尤其是与电磁学、流体流动、声学、传热等的多物理场耦合建模。
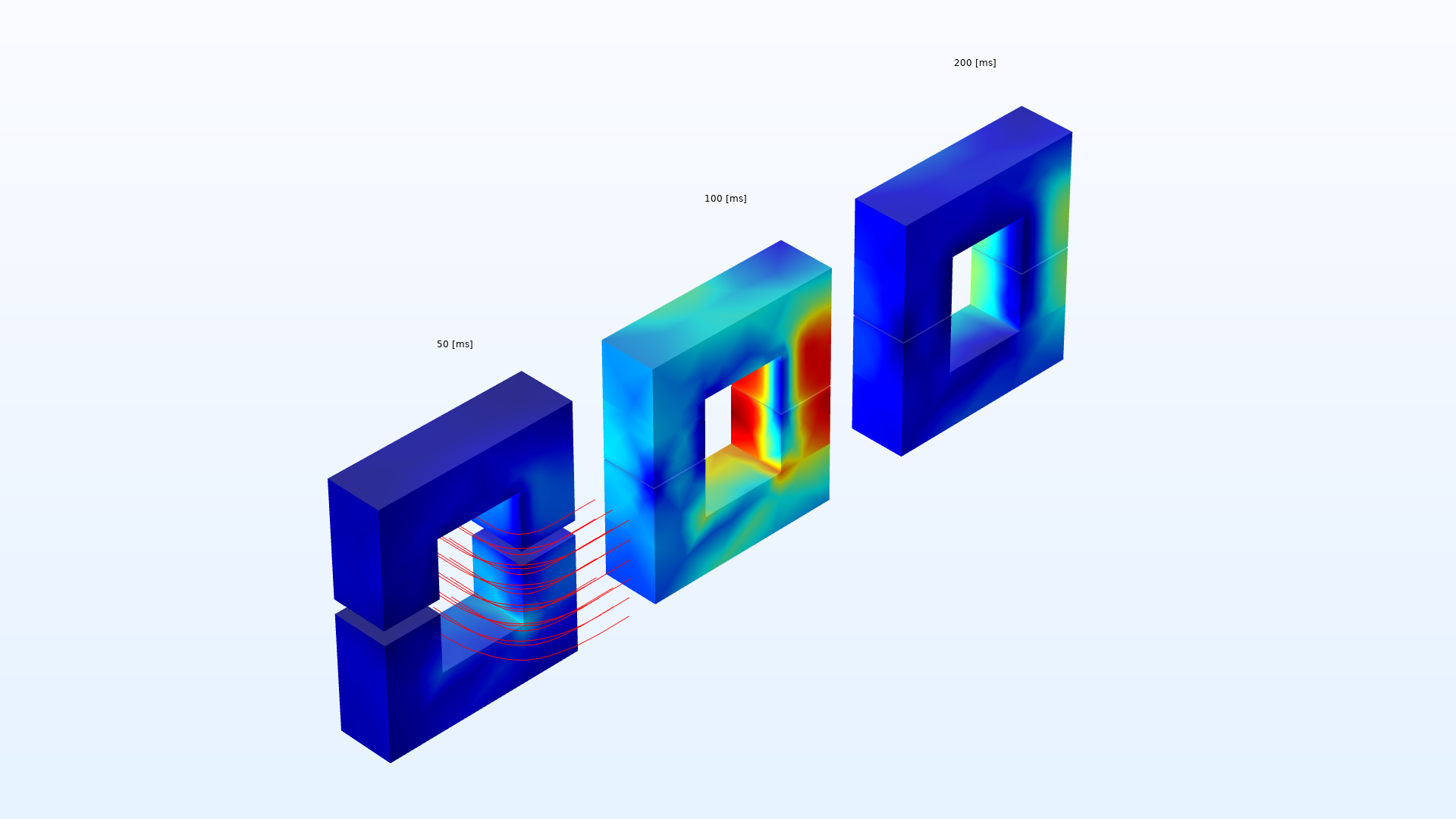
但对于更高级的多体动力学建模,仍需要使用“结构力学模块”才能访问更高级的结构力学功能,例如用于弹性结构、壳和梁单元的更复杂边界条件以及“结构力学模块”的附加模块。电源开关的电动力学 - 多体版本模型演示了在不使用“结构力学模块”的情况下,将“多体动力学模块”与“AC/DC 模块”结合使用的情况。
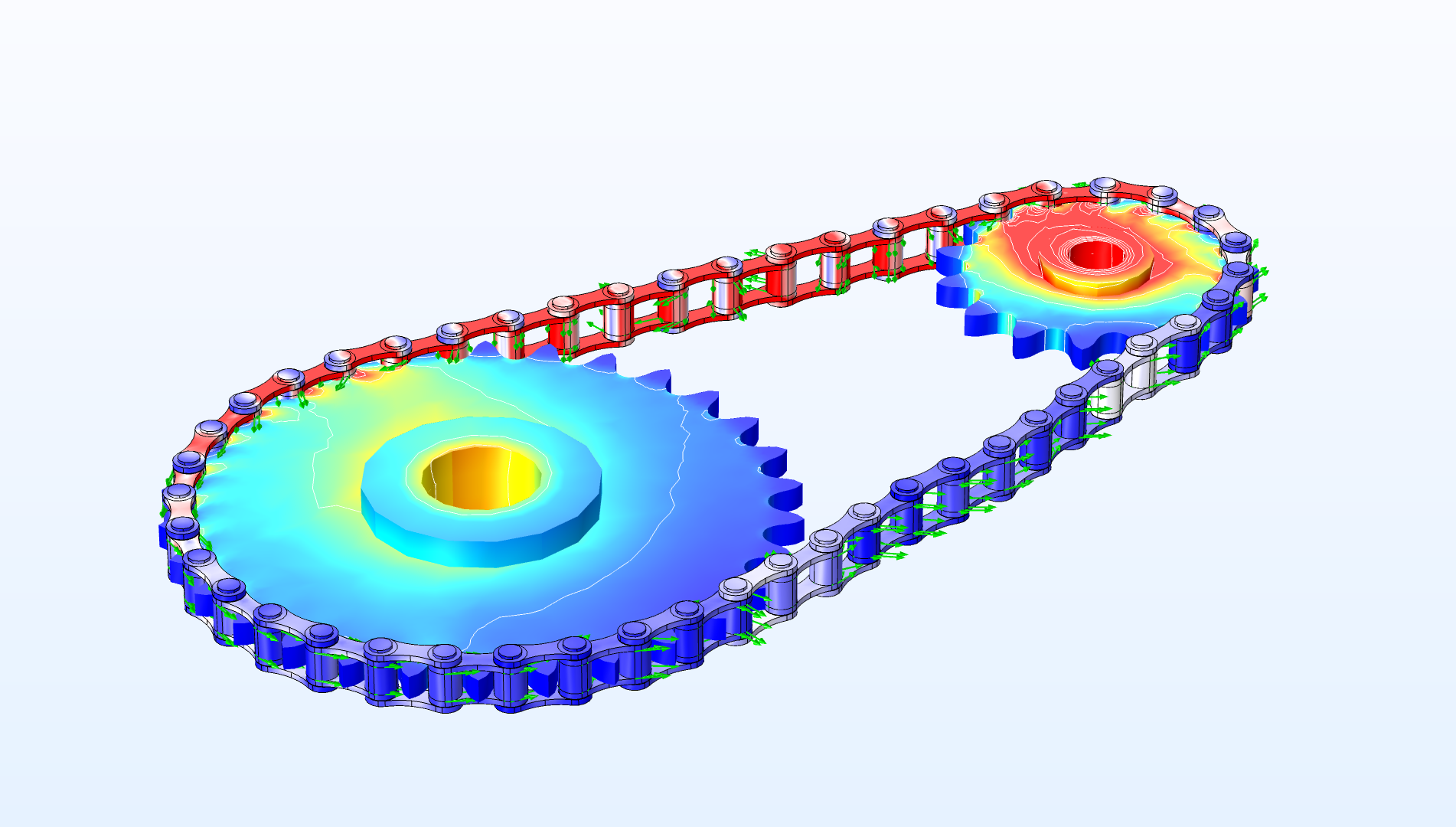
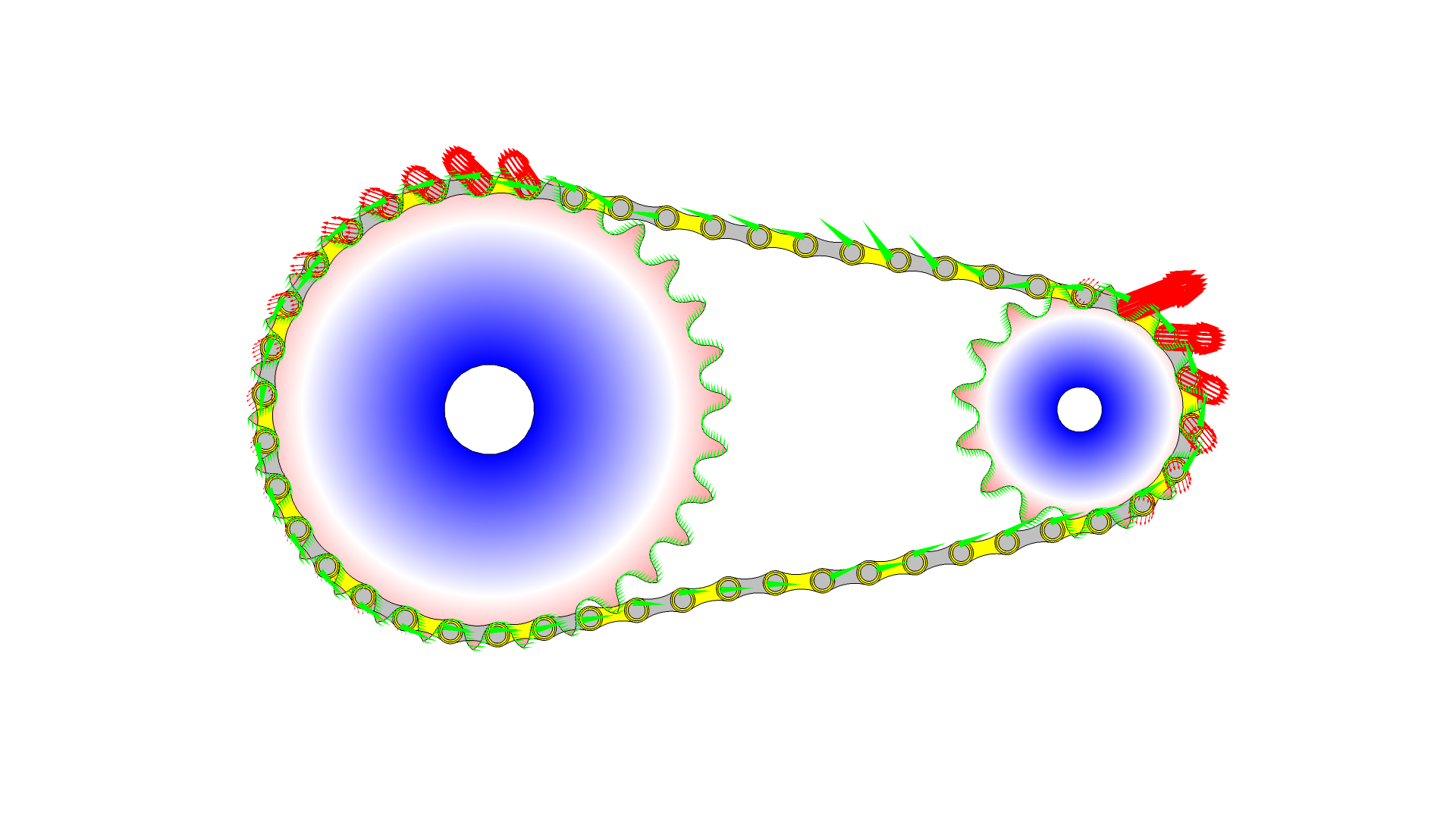
滚子链轮建模
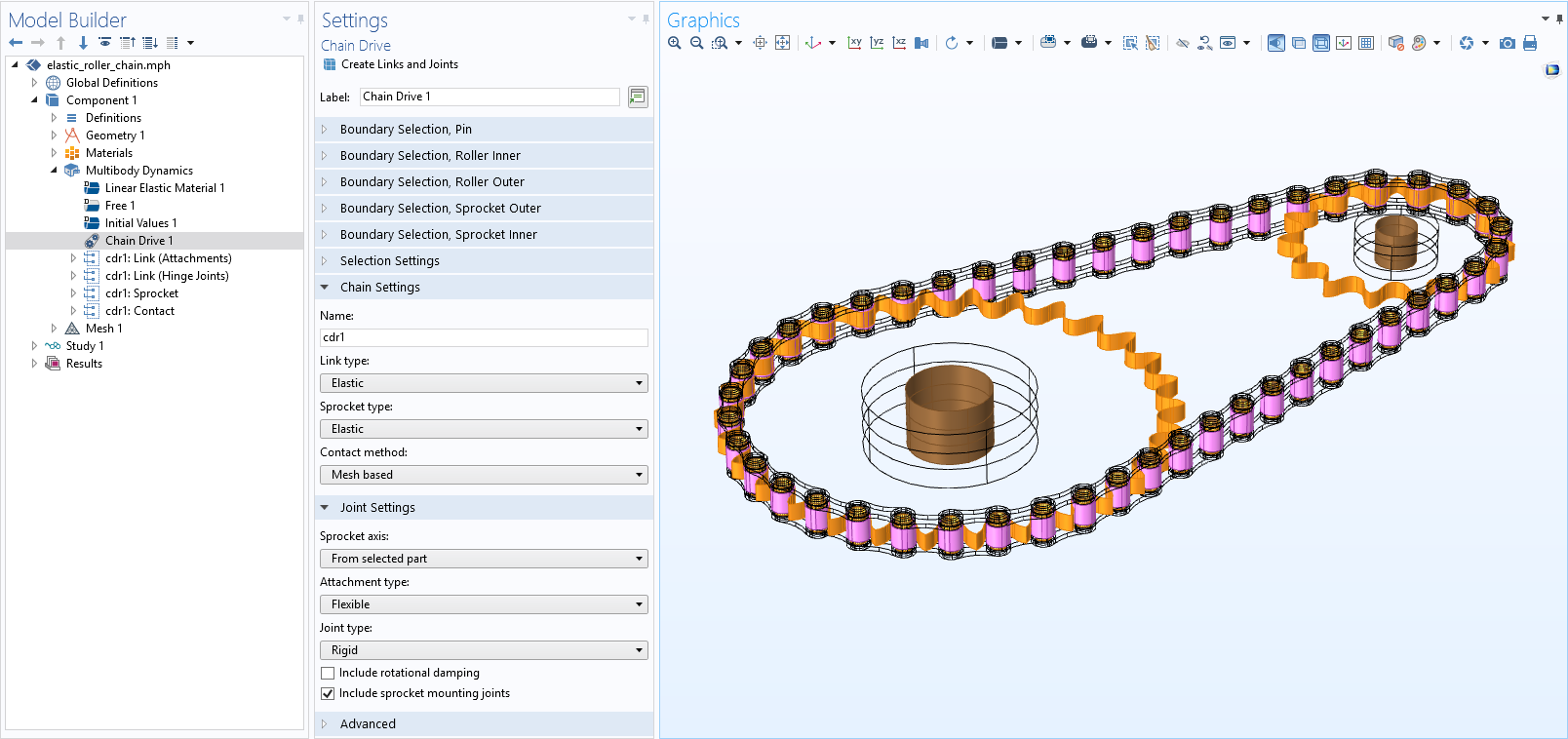
新版本新增了链传动 特征,为滚子链轮建模提供了一个框架,您现在可以轻松设置此类模型。链轮和链节可以单独定义为刚性或弹性。您可以使用创建连杆和关节 按钮来自动添加所有必需的刚性域、连接件 和铰链关节 节点。链轮与链节之间的接触可以通过基于滚子中心的方法或基于网格的方法进行建模。此外,您也可以对关节中的衬套和损耗进行建模。
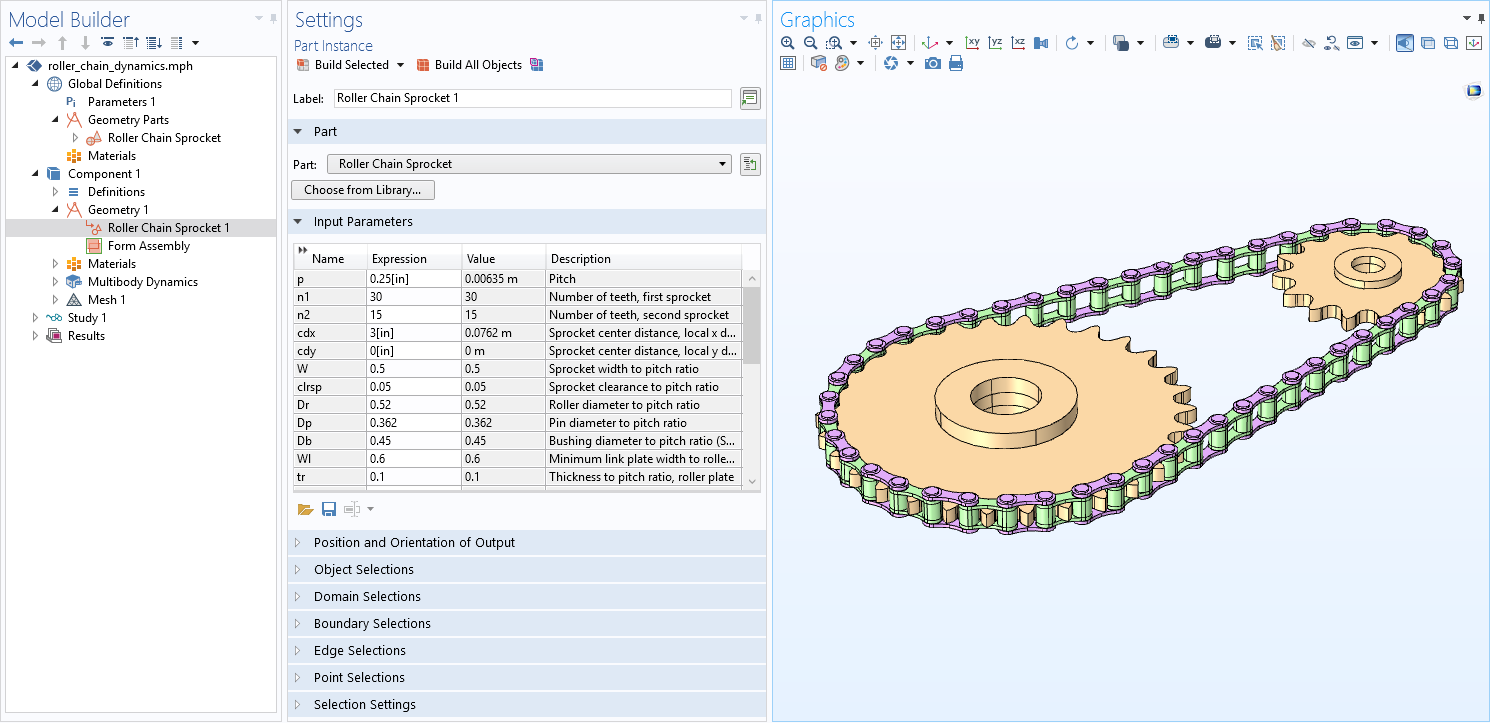
不仅如此,为了方便链传动建模,“零件库”中还添加了新的几何零件;既有单独的链轮或滚子链组件,也有完整的滚子链轮总成。为了使您能够轻松快速地建立模型,零件已经过高度参数化,您可以使用选择颜色功能,并在物理场接口中提供连杆、关节边界和接触边界等选择。随后,当您在链传动 节点中选择链几何零件时,软件会自动指派所有相关选择。
您可以在滚子链轮总成的应力分析和滚子链轮总成的动力学模型中看到此功能的应用演示。
自动模型设置
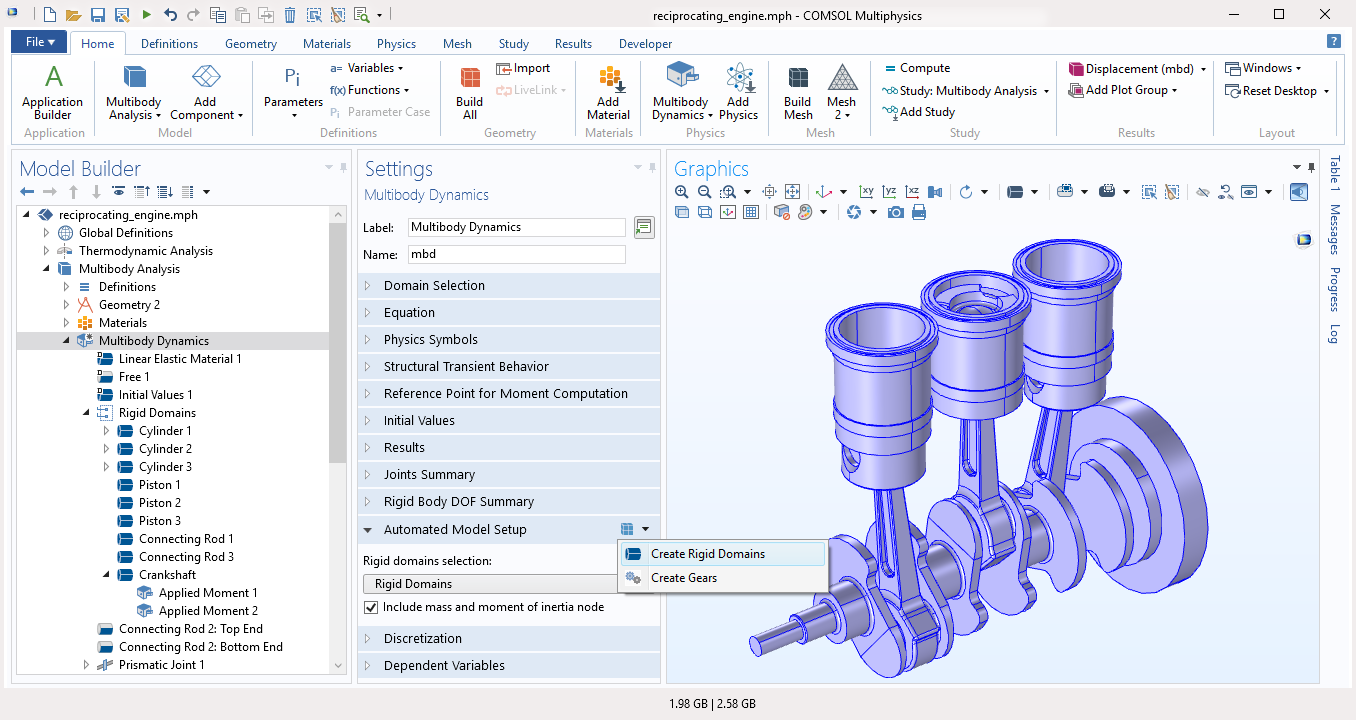
多体动力学 接口节点中新增了自动模型设置 栏,用于分析大型刚性多体系统,可以根据几何信息自动生成物理场节点。通过使用创建刚性域 按钮,您可以为整个物理场选择或子集中在几何上不相连的对象生成刚性域节点。您也可以通过选中复选框来自动包含质量和惯性矩 子节点。三缸往复式发动机和人体坐姿的生物力学模型模型演示了这一功能。
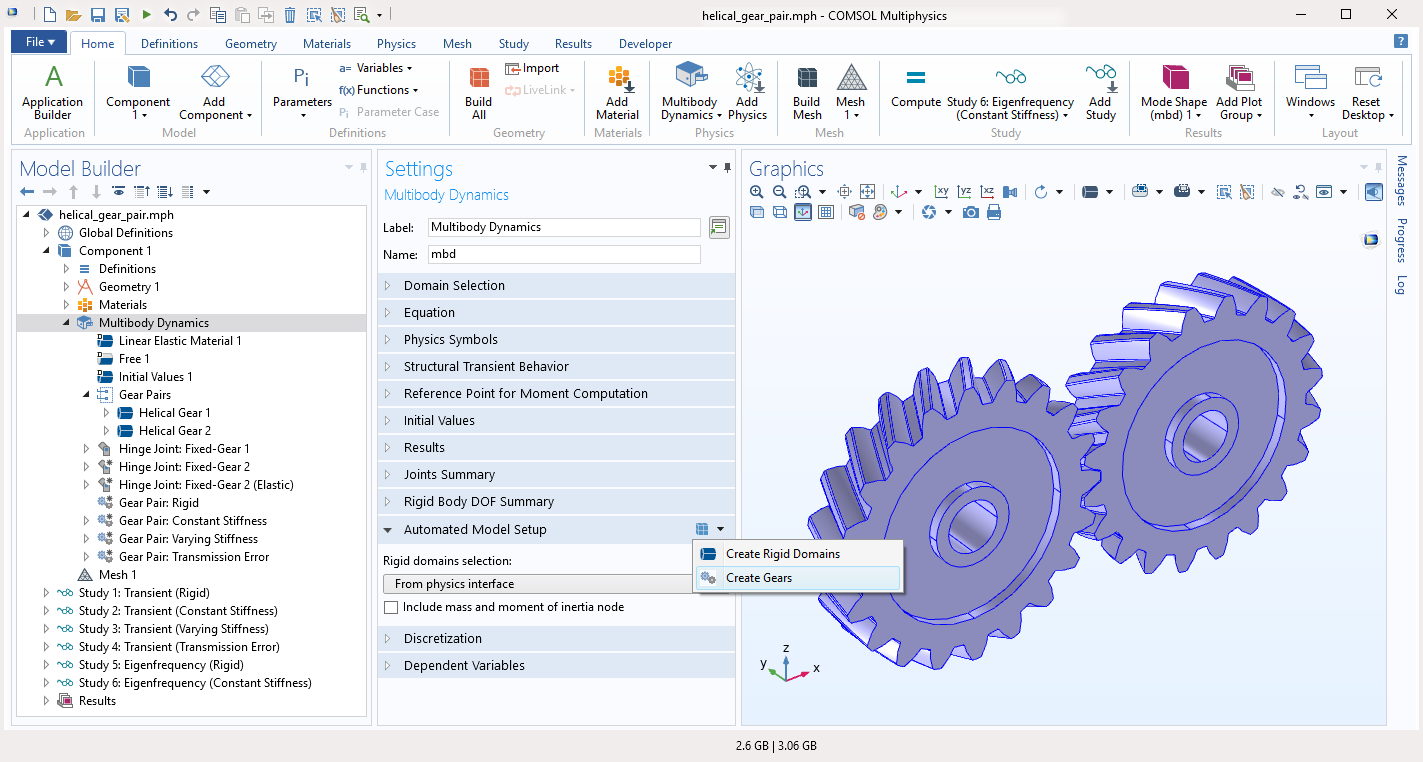
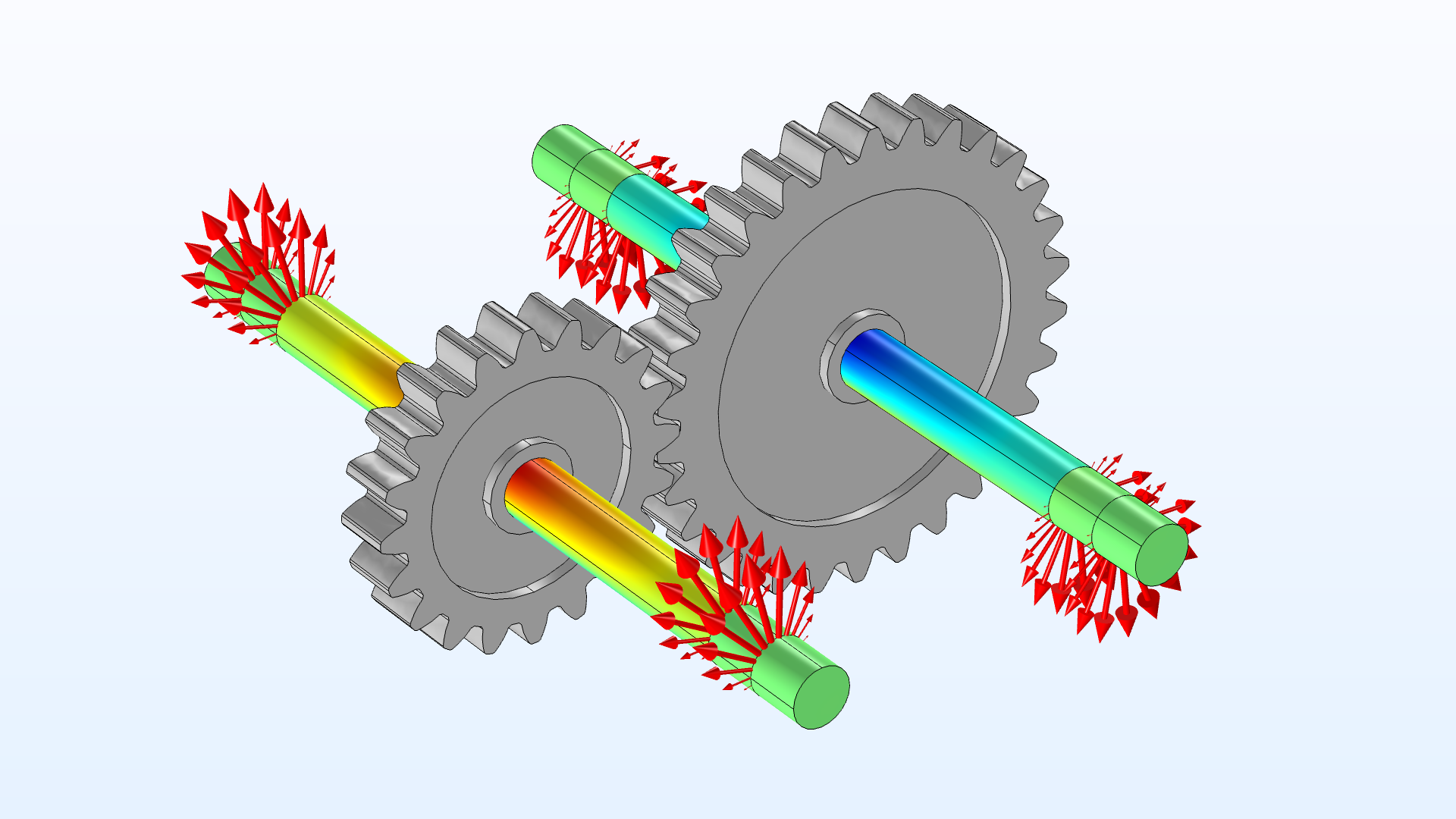
除此之外,您还可以使用“自动模型设置”功能基于几何信息创建齿轮。通过使用创建齿轮 按钮,可以生成与几何图形中每个齿轮零件对应的不同齿轮节点。软件将在自动生成的齿轮节点的设置中自动输入所有齿轮参数,例如齿数、节圆直径、压力角、齿轮中心和齿轮轴。借助此功能,您可以避免在几何与物理场设置中输入两次齿轮参数,从而加快齿轮多体系统的模型设置。斜齿轮动力学和锥齿轮上的力和力矩模型演示了这一功能。
接触建模功能得到扩展
接触建模功能已扩展到更多的物理场接口,现在可用于:固体力学、多体动力学,壳(新)、多层壳(新)以及膜(新)。此外,您也可以分析通过其中任意两个接口建模的边界之间的接触。同样,您还可以对边界(以上任意接口在其中处于活动状态)与任意已划分网格的部分之间的接触进行建模,即使后者没有指派任何物理场亦是如此。
以下模型使用了这一新功能:
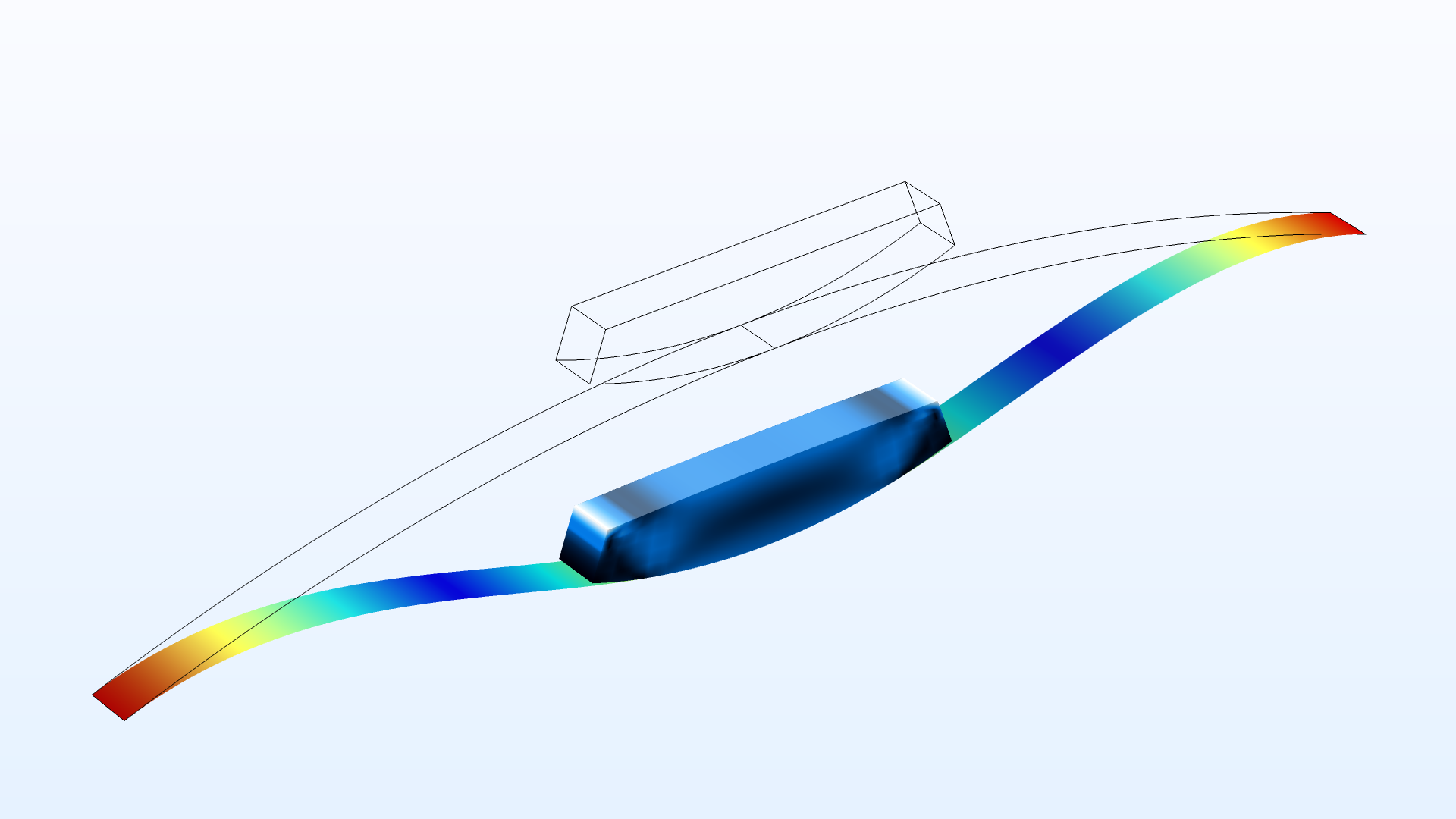
- block_on_arch(新模型)
- instability_two_contacting_arches(新模型)
- contacting_rings
- snap_hook
- snap_hook_penalty
- transient_rolling_contact
- hyperelastic_seal
旋转域中的固体力学
在模拟包含旋转域和静止域的混合系统中的多物理场问题时,可以在共转构型中使用固体力学 接口,从而只为相对于旋转的变形进行建模。与求解包含大型全局旋转在内的总位移相比,这种做法要有效得多。在许多情况下,甚至可以使用线性公式来求解力学问题。为此,旋转坐标系 特征提供了刚体转动和相对位移的叠加,用于控制其他物理场接口工作的空间坐标系。
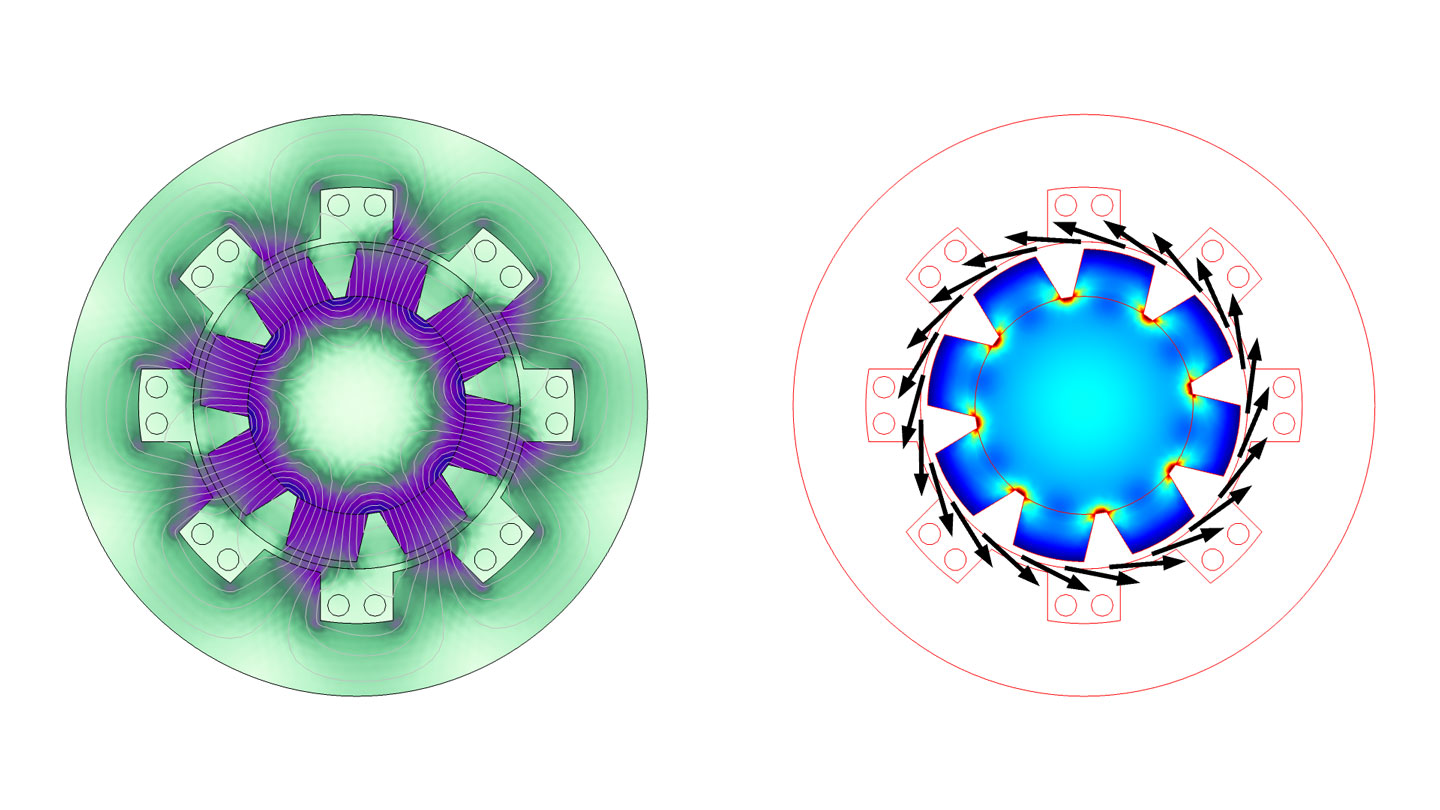
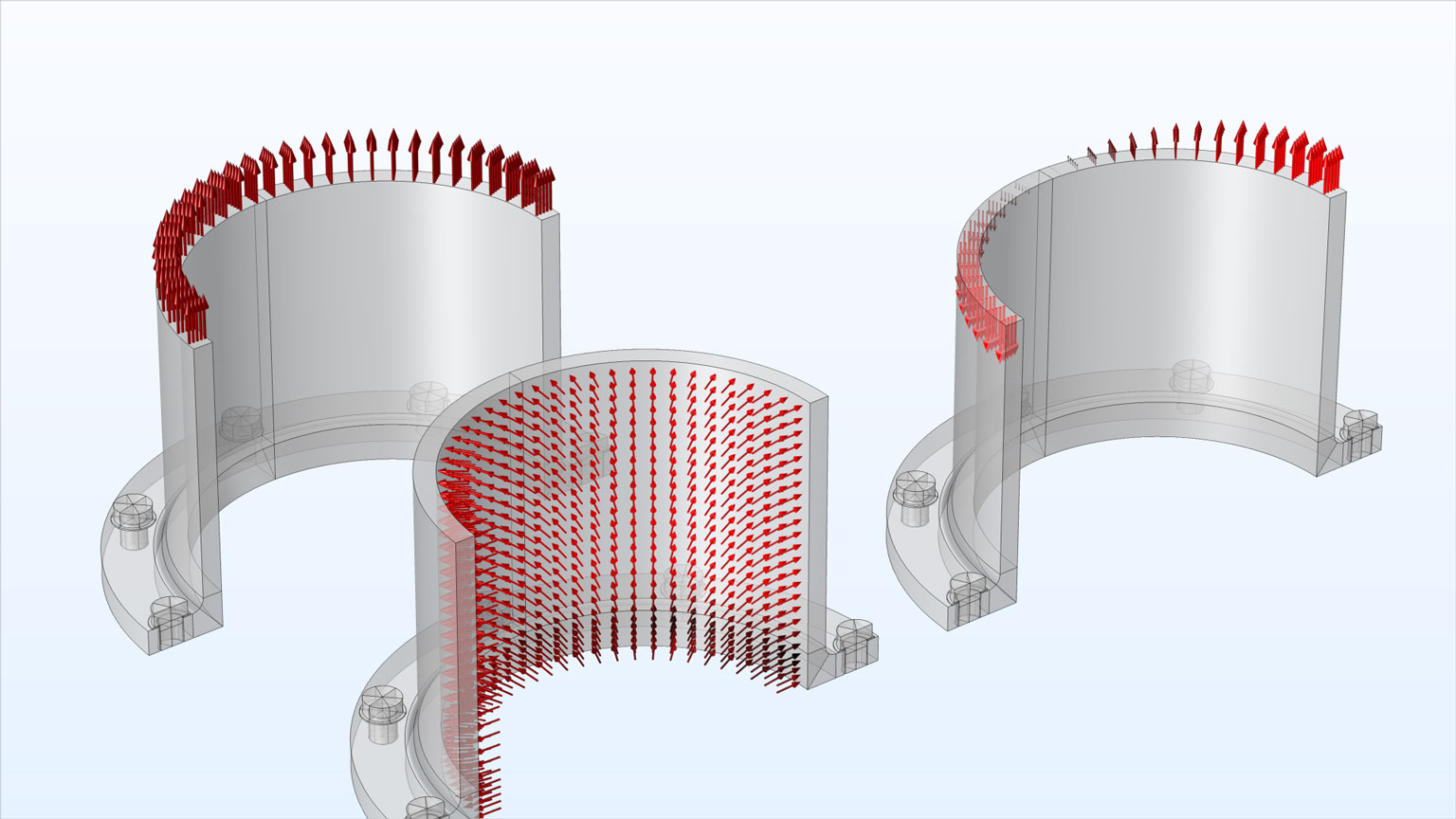
载荷可视化
现在,所有结构力学物理场接口都支持将施加的机械载荷作为默认绘图。由于载荷图与解相关,因此,使用新的解更新数据集时,箭头方向和颜色都会更新。即使是抽象载荷(如作用在刚性连接件和刚性域上的力和力矩),也会在它们的真正应用点上绘制出来。新版本为此功能引入了一个新的箭头类型,用于绘制作用力矩。超过 100 个模型使用这个新功能进行了更新。
新的教学案例
5.5 版本新增了多个教学案例。
滚子链轮总成的应力分析
“案例库”标题:
elastic_roller_chain
从“案例下载”页面下载
滚子链轮总成的动力学
“案例库”标题:
roller_chain_dynamics
从“案例下载”页面下载
齿轮敲击和轴承不对中引起的轴振动
“案例库”标题:
gear_rattle_with_bearing_misalignment
从“案例下载”页面下载