由 Walter Frei 创作的所有博客

求解电磁波问题的仿真工具
使用 RF 模块或“波动光学”模块求解电磁波问题时,我们利用的是有限元方法求解 Maxwell 控制方程。本篇博客文章将针对建模、网格剖分、求解和后处理这几个步骤介绍几种方法及其适用范围。
电磁波问题中的材料建模
每次利用 COMSOL Multiphysics 求解电磁波问题时,我们都会开发一个包含多个域和边界条件的模型,并且在域内使用各种材料模型来表征不同物质。从数学的角度来看,所有这些材料最终都会在控制方程内以相同的方式进行处理。让我们来分析这些材料模型,讨论何时应使用这些模型。
模拟电磁波问题中的金属对象
金属是一种高导电材料,能够非常好地反射入射的电磁波—光、微波及无线电波。当通过 RF 模块和波动光学模块模拟频域电磁波问题时,您可以通过其中的几个选项来模拟金属对象。这里,我们将介绍阻抗、过渡边界条件和完美电导体边界条件,并说明每类条件何时使用。
如何选择 CAD 数据处理模块?
COMSOL Multiphysics® 软件提供了多个附加模块来处理外部 CAD 及 ECAD 数据。这些模块支持在 COMSOL Multiphysics 分析工具与 CAD 和 ECAD 设计软件之间进行单向或双向数据传输。本篇博客将介绍这些模块的功能及其应用的必要性。

借助 Beer-Lambert 定律模拟激光与材料的相互作用
高强度激光入射在部分透明材料上会在材料本身沉积功率。如果能借助 Beer-Lambert 定律描述入射光的吸收,我们就可以通过 COMSOL Multiphysics 的核心功能来模拟能量的沉积。本博客将介绍如何模拟吸收率受温度影响的材料对入射光的吸收,以及随之对材料产生的加热。

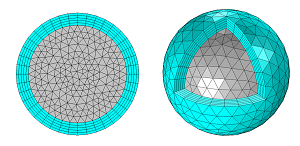
借助分割技巧改进网格剖分
通常,有限元建模中最乏味的一步便是将 CAD 几何细分为有限元网格。这一步通常称为网格剖分,该操作有时可完全自动化。但更多时候,细心的有限元分析人员希望能通过半自动化的方式来创建网格。虽然这将涉及更多操作,但却能带来一些相当明显的优势。本篇博客中,我们将探讨一个非常重要的手动网格剖分技巧:几何分割的概念。
利用 COMSOL Multiphysics 拟合实验数据曲线
在 COMSOL Multiphysics 中,我们通常需要使用实验数据来表示材料属性或模型的其他输入项。但是,实验数据通常有许多噪点,并会包含我们不希望引入仿真中的实验错误。在这篇博客中,我们将研究如何借助 COMSOL Multiphysics 的核心功能来为实验数据拟合平滑的曲线与表面。
用于电磁波问题的端口与集总端口
当使用 COMSOL Multiphysics 软件在频域模拟波动电磁场问题时,有几个选项能够进行无反射传播电磁波的边界模拟。本文我们将讨论 RF 模块的‘集总端口’边界条件,以及 RF 模块和波动光学模块中的‘端口’边界条件。
使用事件接口模拟温控器
温控器 装置的作用是感测系统温度,并基于温度信息控制系统中的加热器和冷却器,使系统温度始终接近期设定值。温控器种类众多,我们今天只重点介绍一种利用两个设定点自动打开或停止加热器的温控器。这种温控器被称为开关式 控制器或继电式 控制器,我们可以使用 COMSOL Multiphysics 的事件 接口对其进行模拟。

对周期性热负荷进行建模
我们经常收到关于周期性或脉冲性热负荷的建模问题。也就是一个热负荷在已知时间内反复启用和停用的情况。使用COMSOL Multiphysics 中的事件 接口,我们可以轻松、准确并且高效地对这种情况进行建模。这篇文章,我们将为您介绍这种建模技术,它适用于多种类型的瞬态仿真,在这些仿真中,负荷的变化发生在已知时间内。 编者注:这篇博客于 2022 年 10 月 4 日更新,以反映更新后的建模功能。 瞬态仿真简介 首先,我们先从概念上来简单了解一下在 COMSOL Multiphysics 中求解瞬态问题时使用的隐式时间步进算法。这些算法根据用户指定的容差来选择时步。虽然这允许软件在求解中出现渐变时采取非常大的时间步进,但缺点是使用太宽的容差会跳过某些瞬态事件。 为了理解这一点,我们以一个普通微分方程为例来说明: \frac{\partial u}{\partial t} = -u + f(t) 其中,强制函数 f(t) 是一个从 ts 开始,在 te 结束的矩形单位脉冲。给定初始条件 u0=1,我们可以用解析法或数值法在任意时间长度上求解这个问题。 如上图所示,在解析解的图中,当激励函数为零或一时,我们可以观察到解呈指数下降和上升。为了求解这个问题,我们使用默认的瞬态求解器,来看看两个不同相对容差的数值解: 相对容差为 0.2 和 0.01 时的数值解(红点),并与解析结果(灰线)进行了比较。 从上面的图中我们可以看到,非常宽松的相对容差 0.2 并不能准确描述负荷的变化。当设置比较严格的相对容差 0.01 时,得到了合理的解。我们还可以观察到,点的间距显示了求解器所使用的不同时间步进。很明显,在解变化缓慢的情况下,求解器采用了较大的时间步进,而在启用和停用热负荷时采用了较小的时间步进。 然而,如果容差设置得太宽松,当热负荷的宽度变得非常小时,求解器可能会完全跳过热负荷的变化。也就是说,如果 ts 和 te 移动到相互非常接近时,对于指定的容差来说总热负荷太小。当然,我们可以通过使用更严格的容差来缓解这种情况,但还有一个更好的选择。 我们可以通过使用显式事件 来避免收紧容差,显式事件 是一种让求解器知道它应该在一个指定的时间点评估解的方法。从这个时间点向前,求解器将继续像以前一样,直到达到下一个事件。让我们看看上述问题的数值解决方案,在 ts 和 t_e 时间段内采用显式时间,以 0.2 的相对容差进行求解,这是一个非常宽松的容差: 使用 显式事件时的数值解,即使采用非常宽松的相对容差 0.2,与解析结果相比也相当吻合。在远离事件的位置,要采取大的时间步进。 上图说明,每当启用或停用负荷时,显式事件 功能就会产生一个时间步进。宽松的相对容差允许求解器在解逐渐变化时采取大的时间步进。在事件发生后立即采取小的时间步进,以使解的变化得到良好的求解。因此,我们既能很好地解决热负荷的启停问题,又能采取大的时间步进,使整体计算成本最小。 现在,我们已经介绍了相关的概念,接下来,我们来看看如何实现这些显式事件。 一个传热的例子 我们来看一个 COMSOL Multiphysics 案例库中的例子,并稍作修改以包括周期性热负荷和事件 接口。在硅晶片激光加热例子中,激光被建模为分布式热源,在旋转的硅晶片表面来回移动。 激光热源本身沿着中心线在晶圆上来回穿越,周期为 10s。为了尽量减少加热过程中晶圆上的温度变化,我们希望在热源位于晶圆中心的时候周期性地关闭激光。 为了建立这个模型,首先我们引入一个事件接口,并在其中定义一个离散状态 变量。这个变量的名字是 ONOFF,它的初始值是 1,如下面的截图所示。 事件接口中的 离散状态屏幕截图。 我们可以使用离散状态 变量来修改代表激光热源的施加热流,如下图所示。 使用 […]
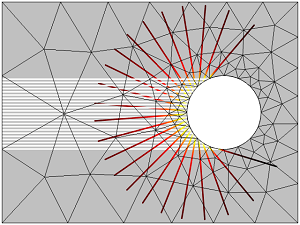
使用完美匹配层和散射边界条件求解电磁波问题
求解波动电磁场问题时,您可能会希望模拟一个包含开放边界的域,即电磁波通过计算域的边界时不会产生任何反射。针对这一问题,COMSOL 提供了几种解决方案。今天,我们将分析如何使用散射边界条件和完美匹配层来截断域,并讨论它们各自的适用范围。

使用广义拉伸算子建立旋转模型
您可以使用 COMSOL Multiphysics® 中的广义拉伸算子来模拟暴露在载荷下的旋转物体。现实世界中一个常见的例子是旋转加热食品。
消费电子产品中的电容触摸屏仿真分析
手机、电子书阅读器、计算机,甚至腕表类的消费电子产品中都用到了触摸屏技术。大量触摸屏中都用到了某种形式的电容传感。让我们来看一下如何使用 COMSOL Multiphysics 的 AC/DC 模块来分析这类电容传感器吧。
使用虚拟操作对几何进行简化
当我们在 COMSOL Multiphysics 中进行几何建模时,无论使用 COMSOL 软件的内置 CAD工具还是其他的 CAD 系统,最终得到的几何结构的特征有可能会多于实际需要。在本篇博客文章中,我们将介绍一组名为虚拟操作的特征,可以帮助您便捷又快速地简化任意 CAD 数据,为后续的建模和网格剖分工作提供便利。
射线光学模块简介
最新发布的 COMSOL Multiphysics 5.0 版本中,新增了用于电磁模拟的射线光学模块。这个可选的附加模块包括几何光学 接口,可用于模拟波长远小于模型最小几何实体时的电磁波传播。几何光学 接口包含多种特征和可选设定,并且完全支持多物理场仿真。

模拟盘管换热器
盘管换热器非常简单,且容易制造。在这篇博客中,我们考察了一个轴向环绕的铜盘管,它通过输运热水来加热圆形管道内的空气。因为沿中心线两侧的几何几乎相同,所以模型使用二维轴对称面求解; 同时增加了额外的表达式来计算盘管匝间的温降,这大大简化了模拟。
利用对称性简化磁场建模
介绍在电磁模型中可以利用的3种对称性边界条件。磁绝缘、完美磁导体和 1/8 对称性。
如何在不知道积分限的情况下对函数进行积分?
您知道 COMSOL® 软件可以解决积分和偏微分方程吗?学习如何积分函数——即使不知道积分的极限。

COMSOL Multiphysics 能够求解什么类型的流-固耦合问题?
经常有人问我:“COMSOL Multiphysics 能够求解流-固耦合(FSI)问题吗?”答案当然是肯定的。接下来,我将介绍几种求解流-固耦合问题的方法,以及分析这些不同问题所需要的 COMSOL 产品。 各种类型的流-固耦合模拟 广义上讲,只要模拟过程涉及计算流体中的速度和(或)压力场,以及与流体相互作用的固体材料中的应力和应变,就是在求解流-固耦合(FSI)模型。 圆柱绕流 在模拟流-固耦合问题时,您可以进行各种假设,来降低模拟的复杂度并减小计算量。首先,我们来看一个使用 COMSOL Multiphysics 创建的最完整的流-固耦合模型:绕圆柱的流体流动。 切向流场中一个圆柱体尾流中的柔性物体变形情况。 圆柱体后方的流体尾流引起其后方的突出物产生大幅振荡,求解这类模型需要解决三个问题。首先,在流体流动区域求解纳维-斯托克斯方程。接着,计算固体位移。最后,求解流动域的网格变形问题,以考虑流体可以流经的变形区域。 对于这种非线性多物理场耦合,您可以使用 MEMS 模块 或者结构力学模块中的流-固耦合 接口模拟。这类模拟可以在时域中求解,也可以看作稳态(定常)问题求解。 上述示例考虑了固体材料中应力和应变之间的线性关系。如果想模拟具有非线性应力-应变关系的材料,例如通常用于描述橡胶和聚合物的超弹性材料模型,还需要使用非线性结构材料模块。 蠕动泵:一种利用滚轮在软管上滚动来推动流体流动的泵。 图片来源:Veryst Engineering。 单向流-固耦合 另一种情况,您可能提前知道结构位移相对较小,但应力可能很大。对于这种情况,仍然可以使用 流-固耦合 接口,但也可以使用 单向耦合 求解器计算流动解,并在结构上施加流体载荷。这样,就可以避免计算网格的变形。 您也可以完全不使用流-固耦合接口,重新开始考虑这类单向耦合 FSI 问题,铝挤出工艺中的流-固耦合案例模型就介绍了这种处理方法。此外,如果您正在求解非常高速的流动问题,并且不关心流动中的短时间尺度紊乱振荡,那么可以将湍流流动模型作为流-固耦合模型的一部分。CFD 模块和传热模块中都包含适用于不同流态的各种湍流模型。 周期性流场中的太阳能电池板模型:计算了太阳能电池板周围的湍流气流和由此产生的结构应力。 流体中的结构振动 如果您提前知道正在模拟的是流体中的振动结构,那么通常可以假设结构位移相对较小。因此,在周围流体中诱发的任何体运动都可以忽略。但是,由于结构在振动,流体将产生压力波,从而产生声辐射。我们可以通过 COMSOL 软件中的声学模块所提供的 声-结构相互作用 接口来求解这类问题。 这个接口假定物体位移的变化相对较小,因此不会引起流体产生明显的体运动,只会引起流体压力场的变化。您可以在时域中求解这类问题,也可以假设位移和压力随时间呈正弦变化。这样,就能够在频域中模拟,耗费较小的计算量。在模拟分析过程中,还可以考虑包括由于流体黏度和材料阻尼引起的体损耗。 扬声器辐射的声压级。 此外,您还可以进一步求解热热声-固耦合问题,它求解的是纳维-斯托克斯方程的线性频域形式,还可以考虑显式模拟产生的热和黏性边界层中的损耗。虽然这比声-固耦合问题的计算成本更高,但仍然比求解完整的流固耦合问题更高效。 振动微镜: 振动微镜的应力和位移以及周围空气的速度分布。 多孔弹性介质 声学模块中的 多孔弹性波 接口还可以模拟波在多孔介质(如潮湿的土壤、生物组织和减震泡沫等)中的传播。这个接口可以同时求解结构位移和固体孔隙中流体的压力。例如,计算声波在水-沉积物界面的声反射。 如果您对模拟多孔弹性介质感兴趣,但需要在稳态或时域而不是在频域中求解,那么你需要使用地下水流模块。该模块可以模拟土壤和其他多孔介质中稳态或瞬态压力驱动的流动和静应力。它还包含一个 多孔弹性 接口,用于模拟稳态和瞬态状态下多孔弹性流体和结构的相互作用。 开孔分支井模型: 绘制了土壤中的应力和多孔弹性域中的流体速度。 薄层流体和管道流 上述所有方法都显明确模拟了流体的体积,并求解了这些体积中的速度和(或)压力。在流体层相对较薄的情况下(例如在流体动力轴承中),完全可以不采用整个流体的体积模型,而只求解雷诺方程,获得流体薄膜中的压力。 这种方法只求解沿域边界的流体流动。CFD 模块和MEMS 模块都内置了这个接口。您甚至可以更进一步,只求解沿一条线的流体流动。换句话说,可以使用管道流模块求解沿管道的流动。 对于同时考虑求解沿管道长度的压力变化和管壁弹性影响的模型,请查看这个求解水锤方程的案例模型。 可倾瓦推力轴承:润滑层中的压力场和可倾瓦推力轴承的变形。 进一步简化计算 您可能已经发现,我们是从最复杂的示例开始,逐步探讨如何简化计算,尤其是流体流场的计算。现在,考虑一种极端的情况,即流体完全不移动但确实对结构施加了一个静水压力载荷的示例。 核心功能 对于这种情况,我们可以利用 COMSOL Multiphysics 的核心功能:用户自定义方程、组件耦合算子和全局方程来解决。这些功能允许在模型中引入任意方程,来表示如流体压力等任何变量。正如我们在上一篇博客中所介绍的,您也可以在变形的封闭腔中考虑可压缩和不可压缩流体的影响,以及由此产生的静水压力。 搅拌器模块 我们已经介绍了简化流体流动问题和计算应力的各种方法,接下来,我们考虑已知固体刚体运动的情况下,如何模拟流体运动。对于这种问题,我们可以通过搅拌器模块来求解,即求解搅拌器和搅拌容器的问题。 在这些问题中,固体结构的运动完全由旋转定义,然后再计算流体的运动情况。如果假设固体发生线性弹性变形,还可以计算运动固体中的应力分布。这可以通过单向耦合来解决,即先求解由搅拌器搅拌引起的流体流动,然后在结构变形较小的假设下计算应力。 搅拌器中的流场。 结语 如您所见,COMSOL Multiphysics 能够处理各种类型的流-固耦合模拟问题。如果您对文中的内容感兴趣,或者文中介绍的内容没有涉及您所关注的问题,请联系我们。
可变形容器中流体的静水压力建模
在之前的一篇博客文章中,我们研究了计算和控制充满不可压缩流体的腔体的体积,其中求解了充满流体的橡胶密封件的静态变形。在那个例子中,假设流体是不可压缩的,我们没有显式地为流体建模,而是添加了一个方程来求解压力。在这篇博客中,我们将扩展这种方法并使之包括可变形容器中流体的静水压力。 挤压水气球 考虑一个装满水的橡胶气球,放在一个开着洞的表面上,同时被压头从顶部推动。气球的变形是由于流体的重量以及压头从顶部向下推动造成的,如下图所示。我们采用超弹性材料模型对橡胶材料进行建模,并将使用在前一篇文章中介绍的技巧,在腔体变形时保持腔体的体积不变。 流体的重量使气球发生变形,这导致气球向外膨胀并陷入凹陷中;来自上方的压缩也会使它产生变形,这导致其向外和向上膨胀。由于这种压缩,气球内流体的深度会发生变化。我们想要求解这种深度变化,而不必求解流体流动的 Navier-Stokes 方程,因为我们只对静态(非时变)解感兴趣。 一个装满水的橡胶气球的中心被压缩。当气球被挤压时,最高点的位置和流体的深度会发生变化,从而改变静水压力分布。 合并静水压力 一个装有流体的容器会对容器壁施加静水压力: p(z)=p0+\rho g (z0-z) 其中,\rho 是流体的密度, g 是重力,z0 是容器顶部的位置,p0 是容器顶部流体的压力。由于气球中充满了不可压缩的流体,当我们用压头挤压它时,压力 p0,将会增加。 我们还可以从上面的图像中看到,随着气球被压缩,流体的深度也会发生变化。此外,似乎计算深度需要知道容器的顶部和底部的位置。那么,我们如何在深度上融入这种变化呢?接下来,让我们来看看怎么操作…… 如下图所示,气球内部施加的压力载荷有两个分量。压力载荷的第一部分是根据全局方程计算的。压力载荷的第二部分是由静水压力引起的。理想情况下,第二部分的压力载荷将基于流体的深度,但这个深度是一个我们不知道的变量。所以,我们输入一个只基于z位置的静水载荷,它可以有一个任意的零水平。 施加在气球内边界上的压力载荷是由全局方程计算出的压力载荷和静水压力之和。流体静压在求解过程中逐渐升高。 全局方程约束体积在变形过程中保持不变。 因此,这里看起来好像我们施加了一个压力载荷来约束体积和一个与 z 位置成正比的载荷,但是我们没有正确地计算静水压力,因为我们不知道 z0. 然而,事实证明,全局方程的作用可能比你最初预期的要多一些。 为了理解这一点,我们稍微重写了一下气球内部压力的方程: p(z)=(p0+\rho g z0)-\rho g z 我们马上就可以看到,这几乎与我们输入的压力载荷方程 p(z)= P0-\rho g z 完全匹配,除此之外可以看到,我们通过全局方程计算的压力是容器顶部的压力加上未知的顶部 z 位置的偏移量。所以,虽然我们只求解一个额外的变量 P0,但它解释了两种物理效应:由于体积约束引起的压力变化以及流体顶部 z 位置的变化。 由于这个模型包含几何和材料非线性以及由于接触引起的非线性,因此收敛到解可能很困难。为了解决这个问题,我们将使用负载递增来缓慢增加重力对模型的影响,并逐渐挤压气球。二维轴对称模型用来研究结构的对称性。 最大耦合算子被用于寻找腔内的最高点,以便进行后处理。 求解模型后,利用最大耦合算子对静压的大小进行后处理,计算沿气球内边界的最大z位置。 箭头表示随深度变化的静水压力载荷的解。 上图显示了气球内部的静水压力负荷。箭头的长度由以下表达式给出: WaterDensityg_const(maxop1(z)-z),其中 maxop1(z) 给出变形腔顶部的z位置。 结束语 在今天的示例中,我们对可变形容器(本例中是气球)中流体的不同深度进行了模拟。全局方程用于求解体积保持不变的流体压力,同时也考虑了气球变形时流体深度的变化。 通过使用这种方法,我们不需要显示地求解 Navier-Stokes 方程,就可以解决流固耦合问题,从而节省了大量的计算资源。如果您对这种类型的模型感兴趣,或想了解更多关于这种模型的细节,请与我们联系。
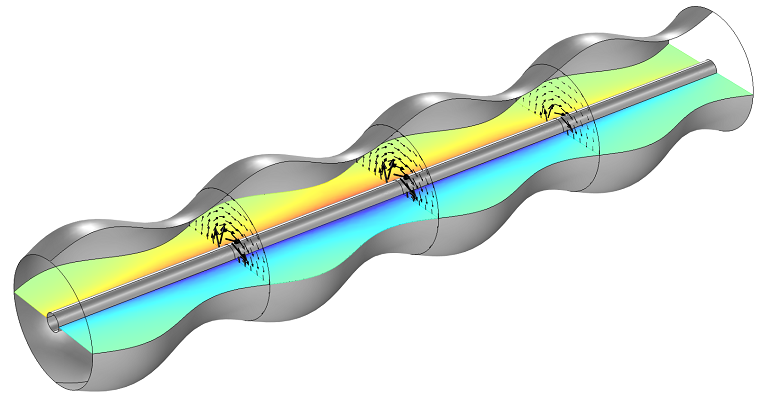
计算波纹波导的阻抗
您知道可以在 COMSOL Multiphysics® 中计算横截面不均匀的波导(如波纹波导)的有效阻抗吗?我们将在这里为您演示。
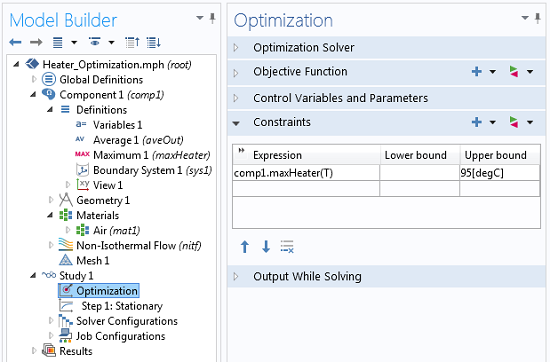
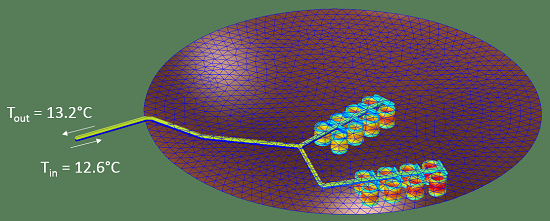
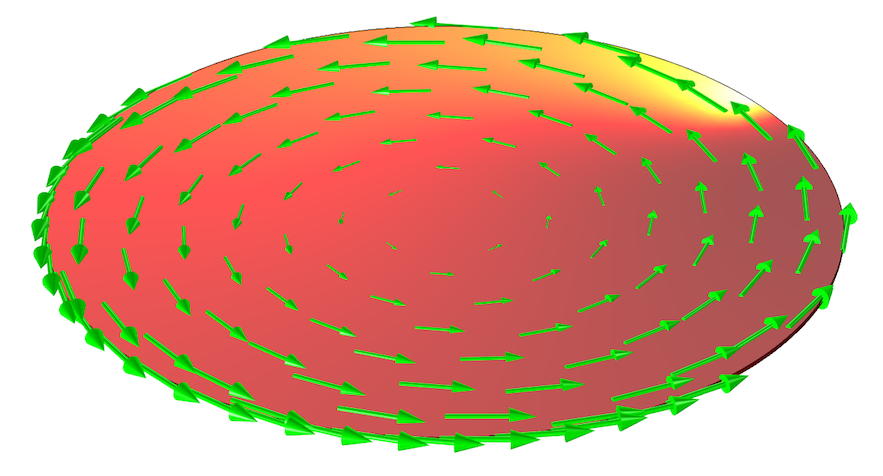
优化加热器功率
我们展示了一种使用 COMSOL Multiphysics® 和优化模块进行过程控制建模和优化的有用方法。
使用组件耦合功能模拟温度控制器
了解如何在 COMSOL Multiphysics® 的热过程模拟中实现一个简单的温度控制器(反馈回路)。我们以硅晶片为例进行演示。

封闭腔体积的求解和控制
在 COMSOL® 软件中,有多种方法可以模拟流体与固体的相互作用。例如,可以使用完整的纳维-斯托克斯方程对压力场和流体速度场进行显式建模。尽管这种方法非常准确,但对于一些流-固耦合问题来说,它的计算成本比实际需要的要高得多。今天这篇文章,我们将介绍一种模拟包含不可压缩流体的封闭腔的方法,假设通过流体的动量和能量传递很小。 编者注: 作者撰写这篇博客的时候,COMSOL 中还没有计算封闭腔中流体载荷的功能。现在,COMSOL Multiphysics® 6.2 版本新增了封闭腔功能,可用于计算封闭腔中的流体载荷。 模拟封闭腔中的流体 我们来看一个 COMSOL 案例库中的示例:超弹性密封条的压缩模型。这个示例考虑的是压缩的软橡胶密封件的横截面。腔体中封闭的流体是空气。该示例计算了压缩力,并将密封件中考虑压缩空气影响与不考虑压缩空气影响的结果进行了比较。 软橡胶密封件的压缩模型。仿真结果显示了应力和应变。使用了不同的方法对密封件内部的空气进行模拟。 示例模型将空气视为可压缩流体,计算了随此二维示例中密封件的横截面积 A 变化的腔体内部压力 p 的变化。接下来,让我们来看看它是如何实现的。将腔体内的空气视为绝热压缩下的理想气体,则压力-密度关系为: \frac{p} {p0}=\left(\frac{\rho} {\rho0} \right)^\gamma=\left(\frac{A0} {A}\right)^\gamma 所以,要计算压力的变化,只需要知道面积的变化就可以了。假设未压缩密封件的面积和压力,以及比热率 \gamma均已知,如何计算横截面积呢?该面积由一个我们甚至不想考虑在模型中的区域来描述。使用高斯定理将面积积分转换为边界积分: A=\int\Omega 1 d\Omega = \int\Omega \left( \nabla \cdot \left[ \begin {array} {c} x \ 0 \end {array} \right]\right) d\Omega = \oint x nx d\Gamma 其中,x 是变形的密封件构型的 x 坐标,n_x 是边界的向外法向量的 x 分量,也在变形配置中,由此给定密封件的封闭区域。这是通过一个定义在封闭体积的完整内部边界上,名为 AreaInt 的积分耦合算子 完成的。变形区域由在“完整模型”上定义的变量 EnclosedArea 定义。 在密封件的内边界上定义面积积分。 分别定义封闭面积和内部压力的变量的定义。必须使用负号来计算面积,因为固体的法线指向腔体。 计算出的变形面积用于确定密封件变形时内部压力的变化。计算得出的压差作为一个载荷施加到密封件内部。要查看上述方法的完整操作,请查看超弹性密封条模型文档。 考虑不可压缩流体 上述方法假设流体是可压缩的,并且密封件的内部压力与面积变化呈函数关系。但如果流体是不可压缩的呢?假设考虑的不是包含可压缩空气的密封件,而是一个充满水的气囊,其中水几乎是不可压缩的。那么,随着结构的变形,封闭的面积不能改变,上述方法就行不通了。因此,我们需要一个替代方案。 我们将 全局方程 功能添加到固体力学接口,通过在这个模型中引入一个额外的方程来求解流体内的压力,使体积不会发生变化。我们来看看这个接口: 引入的全局方程的设置。需要启用高级物理选项才能查看此功能。 上面的屏幕截图显示了用于额外变量 压力 的 全局方程 设置。此方程成立的条件是变量 封闭区域 等于初始面积 123.63 […]