你知道 COMSOL Multiphysics® 软件中的二维轴对称固体力学 接口可以分析扭转和弯曲吗?从6.0 版本开始,你可以在 COMSOL Multiphysics® 中使用这项扩展功能轻松设置二维轴对称模型,而在这之前分析扭转和弯曲通常需要建立完整的三维模型。使用扩展公式,你可以研究由于轴向力而扭转的各向异性材料、扭转加载的周向裂纹或弯曲的应力集中系数,所有这些研究都是在二维几何结构中进行的。今天的博客文章,让我们来看看如何使用这项功能。
什么是二维轴对称?
在之前的博客文章:平面应力和平面应变的区别是什么?中,我们通过对面外方向上的应力或应变场进行假设,讨论了使用平面二维近似分析三维实体对象的方法。二维轴对称是将三维零件简化为二维几何的另一种方法。二维建模的优势在于,它比构建完整的三维模型计算更精简,同时还允许更简单的应用边界条件和更简单的划分网格。
在二维轴对称中工作需要几何(通常但并不总是)、载荷和约束在对象的圆周上保持不变。如果满足这些要求,就可以仅使用一个二维截面来求解运动方程。通过在整个旋转过程中积分控制方程,二维截面足以恢复完整的三维应力状态和应变状态。二维轴对称分析的典型对象是压力容器、扬声器模块、流体混合器、O 形圈或轴。



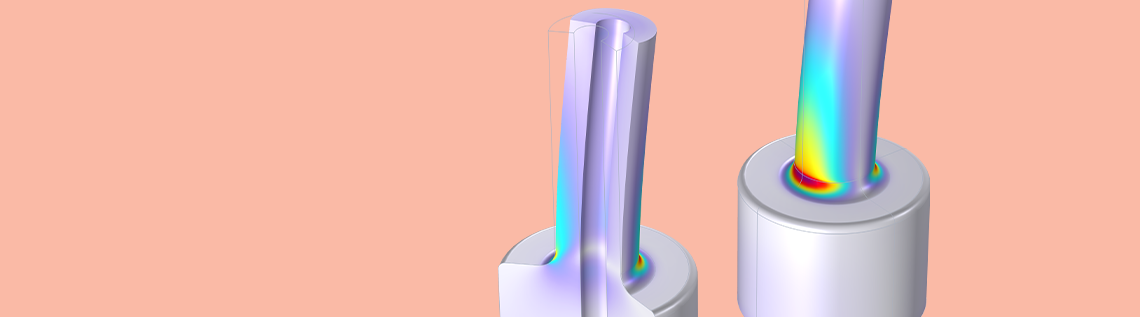
典型的二维轴对称分析:一个三维轴(左),在其顶部(中心)施加轴向载荷的二维轴对称几何表示,以及重新获得的三维剖面图显示了 von Mises 应力分布(右)。
默认情况下,只有在二维轴对称中求解的径向 和轴向 位移 u 和 w。圆周分量 v 假定为零。但是,可以包括圆周位移,它允许在二维轴对称中扭转变形。为了更好地理解扩展功能的应用,我们先复习一下通常如何使用位移梯度来描述变形。如果你熟悉这个概念,可以跳过下一节内容直接阅读后面部分。
位移梯度
固体力学 接口求解运动方程或牛顿第二定律。默认的 线弹性材料 节点中的 方程 部分显示了以体积载荷表示的我们所熟知的定律“质量乘以加速度等于所有力的总和”,以及应力和应变之间的线性关系,这是此特殊材料模型明显特征。
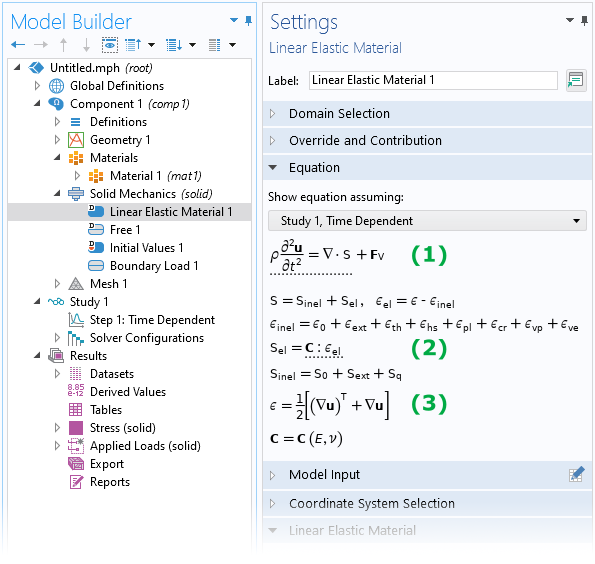
线弹性材料节点 的 方程 部分显示了运动方程 (1) 和线弹性本构方程 (2),以及工程应变 (3) 的定义。
为了在连续介质力学分析中建立本构关系,有必要使用某种合适的度量来描述材料在任何给定点的变形。实际上,在表征变形时有许多测量方法可供选择,例如 工程应变(参见上图中的 (3))、格林拉格朗日应变 或 对数应变等。到底哪种方法有用取决于背景,例如使用特定材料模型或模型是否涉及大变形(几何非线性)。然而,所有这些方法都可以表示为位移梯度的函数 \nabla \mathbf{u},(有时表示 \textrm{grad} \, \mathbf{u})。
那么,什么是位移梯度,它来自哪里?考虑一个(无限小的)小的“块”材料,它可以是任何更大结构的一部分。在初始时间 t_0,该块有一个参考配置(见下面的灰色表面)。在稍后的某个时间 t,该块可能已经经历了刚体运动(平移和旋转)以及变形(拉伸或剪切),如下面的动画所示。
平面二维对象的平移、旋转和弹性变形(纯剪切),视图显示了单独的变形步骤。在 块变形之后,位移梯度用于描述两个初始相邻点之间的位移变化,例如 \textrm{P}_1 和 \textrm{P}_2
在动画中,\textrm{P}_1 和 \textrm{P}_2 两个点已经被标记出来。假设它们彼此无限接近。最初,\textrm{P}_1 点位于 \mathbf{X} 处,而它在当前时间 t 的位置表示为 \mathbf{X}。点 \textrm{P}_1 的新位置也可以用原始位置加上位移矢量来描述,即 \mathbf{x} = \mathbf{X} + \mathbf{u}(\mathbf{X}, t)。
现在,我们把注意力放在邻近点 \textrm{P}_2 上。与第一个点类似,一段时间后 \textrm{P}_2 也会移动到一个新的位置 t。唯一的区别就是点 \textrm{P}_2 距离 \textrm{P}_1 很近,也就是说,它的初始位置是 \mathbf{X} + \textrm{d}\mathbf{X}。因此,当块变形后,\textrm{P}_2 新的位置是
将这个关系稍微重新排列后得到一个表达式 \textrm{d}
\mathbf{x},是点 \textrm{P}_1 和 \textrm{P}_2 在变形配置中的一小步。
= \mathrm{d}\mathbf{X} + \mathrm{d}\mathbf{u} \\[1mm]
式中,位移梯度 \nabla \mathbf{u} 被定义为张量,当物体变形时,它将 \textrm{d}\mathbf{X} (在初始配置中)映射到点 \textrm{P}_1 和 \textrm{P}_2 之间的位移变化。与这些量密切相关的术语 I + \nabla \mathbf{u} = \textrm{d}\mathbf{x}/\textrm{d}\mathbf{X} 被称为变形梯度(通常表示为 F),这个量也出现在许多连续介质力学的书籍中。
在更多实际情况中,相对于初始配置(也是材料坐标系的坐标),\nabla \mathbf{u} 是包含位移场 \mathbf{u} = (u, v, w)^\textrm{T} 导数的张量。对于三维笛卡尔坐标系,位移梯度很简单
\left[
{\begin{array}{ccc}
\frac{\partial u}{\partial X} & \frac{\partial u}{\partial Y} & \frac{\partial u}{\partial Z} \\
\frac{\partial v}{\partial X} & \frac{\partial v}{\partial Y} & \frac{\partial v}{\partial Z} \\
\frac{\partial w}{\partial X} & \frac{\partial w}{\partial Y} & \frac{\partial w}{\partial Z} \\
\end{array} }
\right]
在二维轴对称中,使用柱坐标系,这时位移梯度被定义为
\left[
{\begin{array}{ccc}
\frac{\partial u}{\partial R} & \frac{1}{R} \frac{\partial u}{\partial \Phi}-\frac{v}{R} & \frac{\partial u}{\partial Z} \\
\frac{\partial v}{\partial R} & \frac{1}{R} \frac{\partial v}{\partial \Phi}+\frac{u}{R} & \frac{\partial v}{\partial Z} \\
\frac{\partial w}{\partial R} & \frac{1}{R} \frac{\partial w}{\partial \Phi} & \frac{\partial w}{\partial Z} \\
\end{array} }
\right]
式中,R, \Phi, 和 Z分别是径向、周向和轴向坐标。
添加扭转…
那么,如何重新定义位移梯度以将简单的二维分析扩展到有时称为 2.5 维的分析呢?
默认情况下,二维轴对称实体的圆周方向位移被假定为零。这是因为有很多应用案例只涉及径向和轴向位移,而将位移分量添加到因变量列表会增加一定的计算成本。因此,为了研究二维轴对称中的扭转,必须明确添加圆周位移。我们可以使用 COMSOL 软件 固体力学 接口 设置 窗口中的 包含周向位移 复选框轻松完成。


轴对称近似 中的复选框启用了二维轴对称模型中的周向位移(左)。选择 包含周向位移 复选框时,模型开发器中的许多节点都显示了附加的用户输入,例如在方位角方向(右)中施加负载的场。
选中 包含周向位移 复选框后,软件会完成三件重要的事情:
- 添加周向位移分量作为一个新的因变量
- 显示新的用户输入,例如在圆周方向上施加载荷、弹簧或阻尼
- 修改位移梯度的定义
最后一步使我们求解面外方向的剪切应变(即\varepsilon_{R\Phi} 和 \varepsilon_{\Phi{Z}}),在典型的二维轴对称分析中,它们被假定为零。唯一的限制是位移场必须围绕物体的圆周保持恒定。换句话说,假定 \Phi 的倒数为零(\partial (…)/\partial \Phi=0)。因此,重新定义的位移梯度为
\left[
{\begin{array}{ccc}
\frac{\partial u}{\partial R} & -\frac{v}{R} & \frac{\partial u}{\partial Z} \\
\frac{\partial v}{\partial R} & \frac{u}{R} & \frac{\partial v}{\partial Z} \\
\frac{\partial w}{\partial R} & 0 & \frac{\partial w}{\partial Z} \\
\end{array} }
\right]
其中,对于标准的二维轴对称模型,所有涉及 v 的项通常会被忽略。此处描述的扩展功能适用于所有研究类型。
包含周向位移使得通常需要完整三维分析的研究成为可能。下面动画中显示的2个示例就是这种情况。第一个示例显示了由各向异性材料制成的管,例如层不均匀纤维复合材料。在这种情况下,弹性矩阵包含耦合项,这会导致管在轴向拉动时会发生扭转。第二个例子显示了一个带有周向裂缝的容器。它承受的内部压力和周向力,导致裂缝同时受到张开和面外剪切模式的影响。
通常需要完整三维模型分析的示例:由于各向异性材料特性(左)而具有张力–扭转耦合的管的归一化周向位移,以及在开口处加载裂纹的厚壁容器的 von Mises 应力分布和面外剪切模式(右)。
圆周模式扩展
对于特征频率和频域分析,上述限制只允许 \Phi 方向上的一个恒定位移可以轻微提升。对于某些问题,例如扭转振动,假设解在圆周上具有一定的周期性是合理的。这个想法可以方便地用一个复值假设来表示:
(R,Z) \left[ \cos (m \Phi) – i \, \sin (m \Phi) \right]
这是一个假设线性响应的有效解决方案,这是频域分析最常见的基本假设。是定义位移场中周期数的方位角模式数。有了这个假设,位移梯度变为
\begin{bmatrix}
\frac{\partial u}{\partial R}&-\frac{v}{R}& \frac{\partial u}{\partial Z} \\
\frac{\partial v}{\partial R} &\frac{u}{R}& \frac{\partial v}{\partial Z} \\
\frac{\partial w}{\partial R}&0& \frac{\partial w}{\partial Z} \end{bmatrix} – i \frac{m}{R} \begin{bmatrix}
0 & u & 0 \\
0 & v & 0 \\
0 & w & 0
\end{bmatrix}
这种类型的二维轴对称扩展也称为 圆周模式扩展,可以使用 轴对称近似中的第二个复选框激活(参见上面的屏幕截图)。模式编号必须指定为用户输入。
有两个需要注意的特殊情况:
- m=0,对应于一个常数移位
- m=1,可以描述二维轴对称中的弯曲变形
请注意,COMSOL Multiphysics 会自动在对称线上修改轴对称条件 (u=v=0),以便允许弯曲变形。
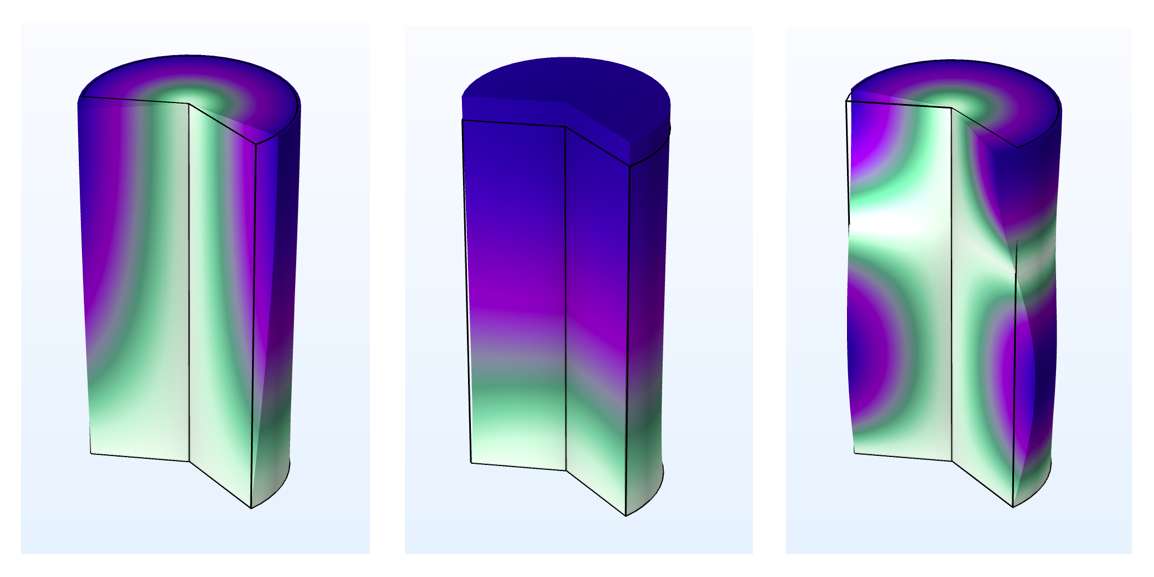
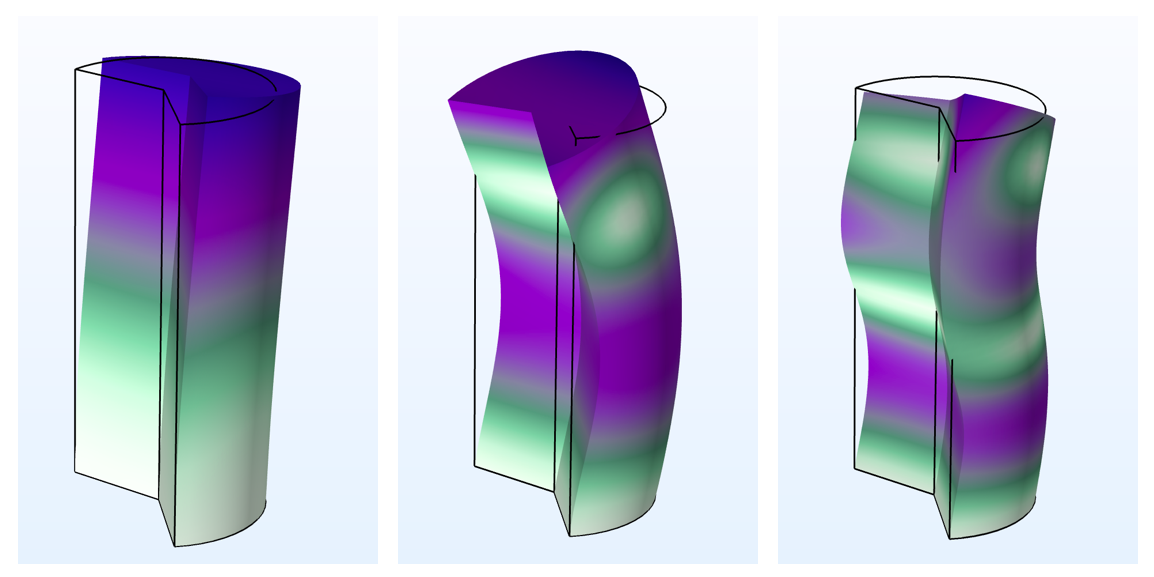
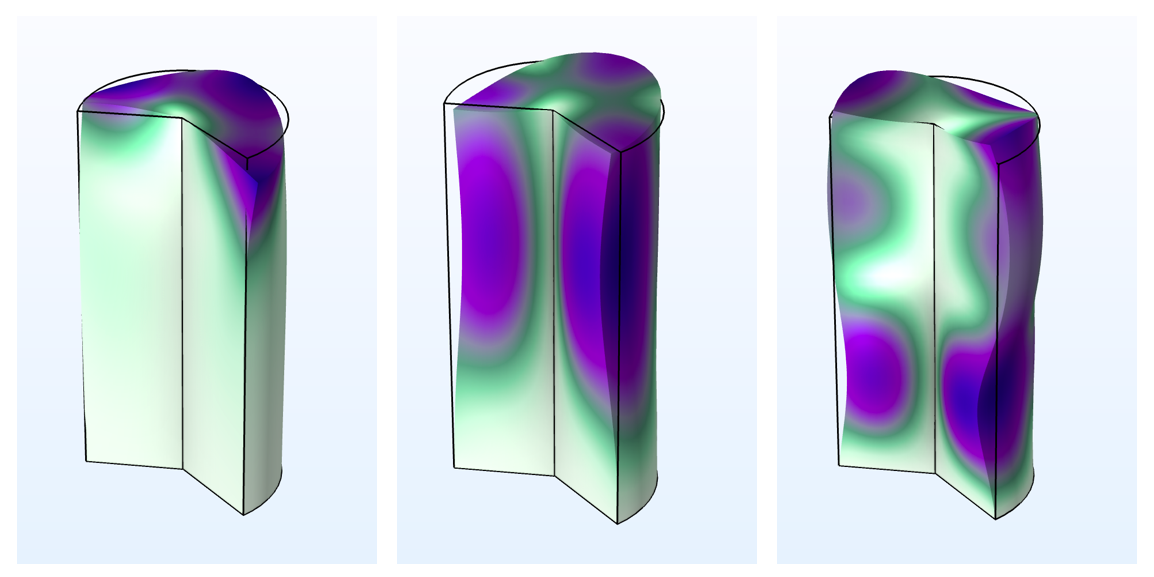
下图显示了特征模式的示例,可以使用圆周模式扩展进行研究。通过改变模式数,可以在相应的全三维分析中找到的所有特征模式——前提是基本轴对称假设成立。
| m=0 |
|
| m=1 |
|
| m=2 |
|
圆柱的前三个特征模态,一端固定用于不同的模态数 m。在这个例子中,m=0 产生扭转和轴向模式,m=1 仅显示弯曲模式,m=2 显示高阶扭转模态。
一般来说,圆周模式扩展只能用于特征频率和频域研究。在稳态和瞬态研究中,圆周位移 v 保持不变,对应于模式编号 m=0。但是,如果在频率为 0\,\textrm
{Hz} 下运行一个频域分析,将得到一个稳定的解,因为所有惯性项都变为零并且所有负载都变得与频率无关。使用这个技巧,可以计算二维轴对称中的静态弯曲变形。下图显示了轴承受弯曲力的示例(模式编号 m=1) 和轴向应力 \sigma_z,与在较薄和较厚轴部分之间的过渡区域中的分析预期应力进行比较。
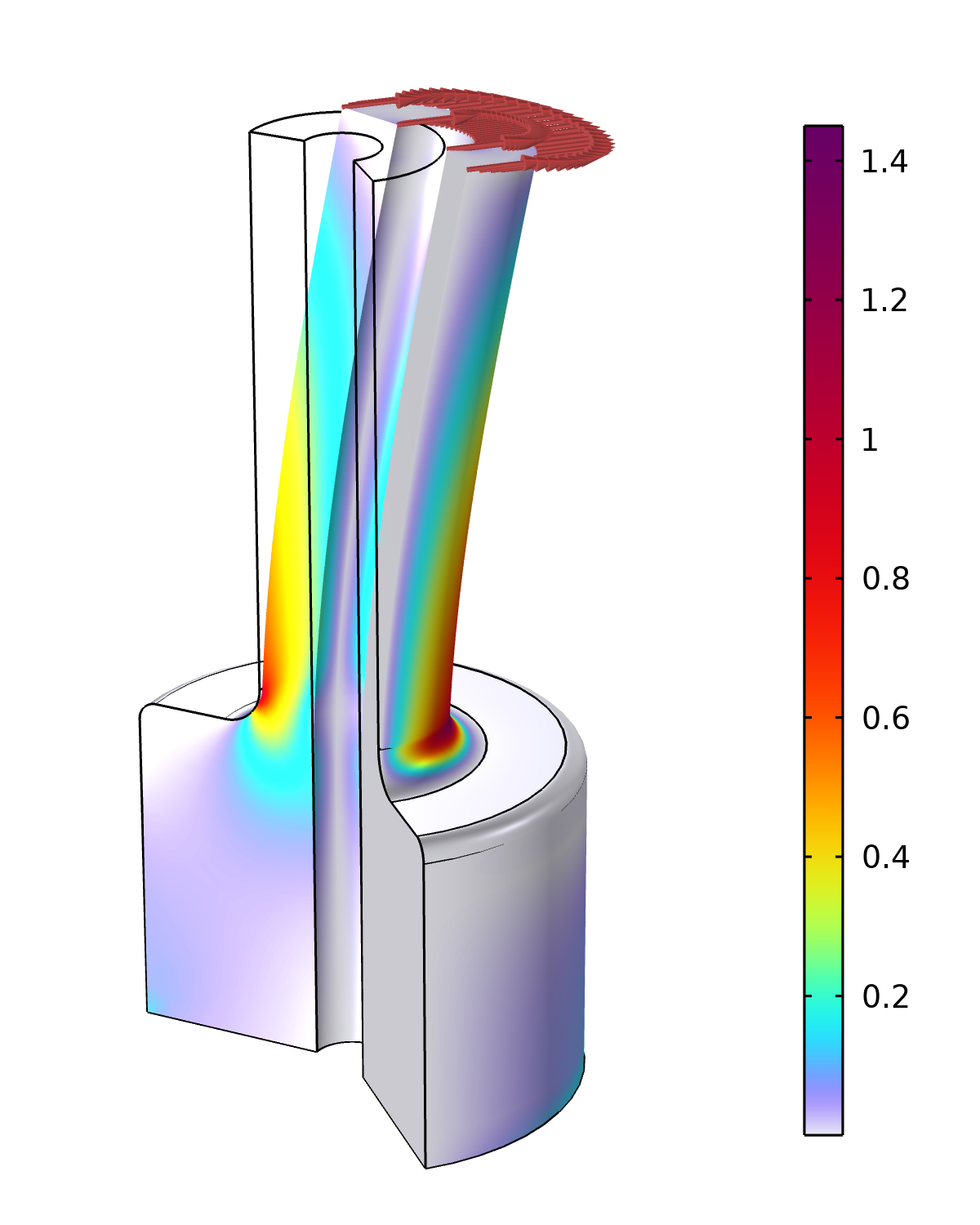
在二维轴对称中模拟的承受弯曲力的轴。该图显示了应力集中系数,或者更准确地说,显示了实际应力之间的比率 \sigma_z,以及从基本弯曲理论中获得的圆角区域中的预期法向应力。
该案例模型,包括在这种情况下如何应用载荷的详细信息可以在文后链接中下载。
其他结构力学接口呢?
为了求解更复杂的位移场,通常用面外自由度扩展具有的二维公式的想法并不是唯一的。例如,壳 接口也支持圆周模式扩展。固体力学 接口中的平面二维等效项被称为面外模式扩展,可以在二维固体力学 设置 窗口中启用。它允许用户模拟面外方向的波状位移。
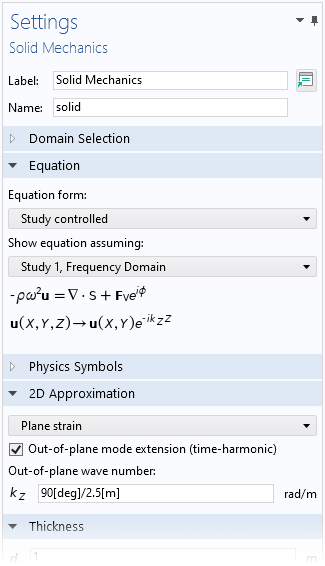
含二维平面应变公式的 固体力学 接口中的 面向模态扩展 复选框。
此外,其他一些物理场接口支持使用类似类型的扩展求解更高级的三维场。例如,在流体接口中,该选项称为 涡流。
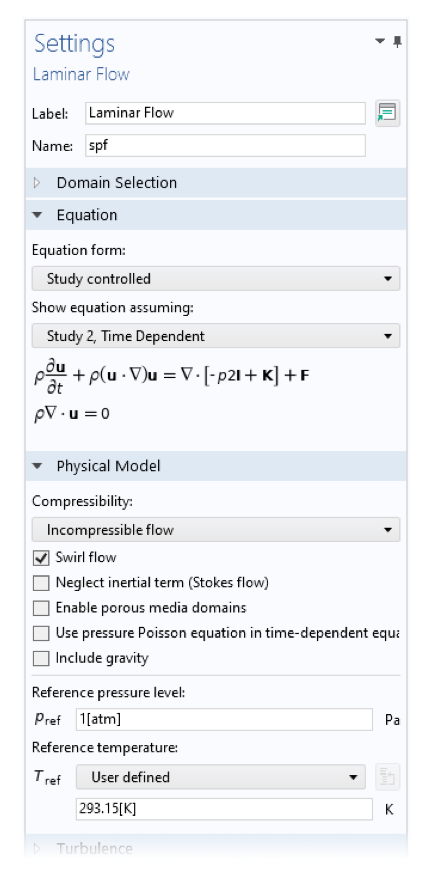
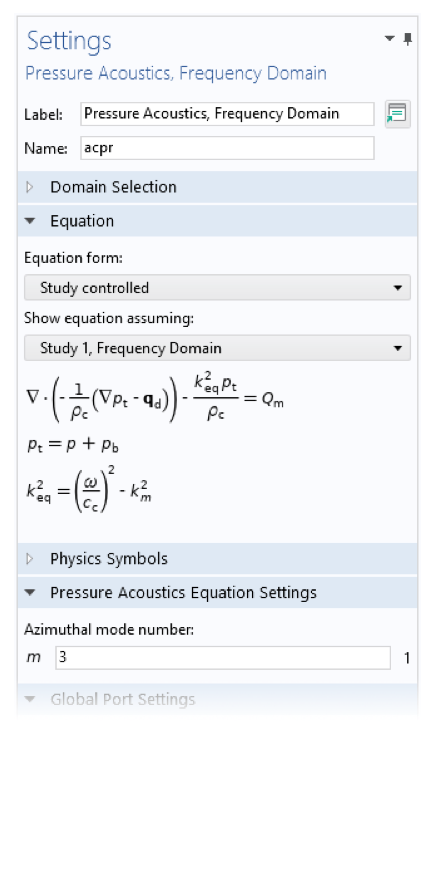
二维轴对称 层流 和 压力声学,频域 接口的设置。漩涡流和 方位角模数设置允许求解圆周方向上形状更复杂的场。
自己动手尝试
想自己动手尝试模拟文中讨论的二维轴对称扭转和弯曲吗?单击下面的按钮访问 MPH 文件。
评论 (7)
山河 姜
2022-10-09您好,如果分析频域,怎么去分析扭转波
Hao Li
2022-10-11 COMSOL 员工您好,如果满足轴对称的相关假设,可以直接添加频率进行分析(需要选择正确的模式),可以使用3D直接建模分析。
对于具体问题可能需要具体分析,您可以详细描述您问题的物理背景,发送Support技术支持我们将帮助您解决问题,网址如下:
http://cn.comsol.com/support
晶 金
2024-01-31您好!关于二维轴对称模型我有一个问题。我模拟的是线偏振光正入射(即入射方向为透镜光轴方向)三维透镜的情况。透镜是关于光轴对称的,所以可以用二维轴对称模型来建模。我也可以选择入射光的偏振方向(强调下是偏振方向),比如处在二维截面内且垂直于透镜光轴,我把这个偏振方向记作x。我的问题是:入射光的偏振方向还原到三维中对应什么情形呢?都是沿着x方向吗?还是说变成了有很多个不同的偏振方向?因为在我这个二维截面下,它是在截面内的方向,还原到三维时,对于另一个不同角度处的二维截面,偏振方向是在这个新的截面内吗?如果是这样,此时的偏振就不是x方向了。本质上来说,即入射光从二维是怎么还原到三维的?能否恳请在百忙之中给予指导,这个问题对我很重要,谢谢!
Qingbin Yuan
2024-02-27 COMSOL 员工在二维轴对称模型中中是基于柱坐标系(r,phi,z)的,无论是几何还是入射光的偏振方向,均要基于此坐标系进行设置。因此,在二维轴对称的的模型设置中,不能直接设置沿x方向偏振,通常是使用平面波展开方法实现笛卡尔坐标系到柱坐标系的转换。
在光学和RF的接口“电磁波,频域”中,内置了基于贝塞尔函数对平面波进行球面波展开,可以使用背景场直接定义线偏振的平面光入射,具体做法可以参考以下案例和博客的介绍:
https://cn.comsol.com/model/cloaking-of-a-cylindrical-scatterer-with-graphene-wave-optics-109861
https://cn.comsol.com/blogs/electromagnetic-scattering-in-2d-axisymmetric-models
晶 金
2024-05-08非常感谢您的解答!我来学习一下这些案例。
明月 王
2025-02-13您好,关于模型弯曲仿真我有一个问题请教一下。如果不是轴对称,只是一个普通的三维模型,假设固定底面,怎样实现弯曲?可以实现给定角度弯曲吗?
Kaixi Tang
2025-02-28 COMSOL 员工您好,可以尝试右键固体力学并展开连接,之后在想要施加弯曲的表面上定义“刚性连接件”,在“刚性连接件”中可以去定义弯曲和旋转的角度以及转轴,如果您是想施加弯矩使结构件弯曲,也可以定义弯矩作用。