
COMSOL Multiphysics® 软件为您提供了链传动系统建模的便捷方法。本文为链传动建模系列博客的第一部分内容。在本篇博文中,您将了解如何使用 COMSOL Multiphysics 零件库中的内置参数化几何零件创建滚子链组件的真实几何模型。
链传动系统简介
自行车上的链条至关重要。当您踩下踏板并旋转自行车的前链轮时,链条将这种旋转传递到后链轮及其相连的车轮上。在许多机器中,也使用类似链条和链轮的组件将动力从一个轴传递到另一个轴或举起重物。

自行车的链传动系统和齿轮。图片由 5 Cent Dollar 提供。通过 Wikimedia Commons 在 CC BY-SA 4.0下获得许可。
{kind=link}
链传动是动力传动系统中重要的一类,广泛用于许多工业应用中。它们的主要用途包括传递扭矩或运动,传送物体或同步不同机械装配部件之间的运动。由不同材料和不同尺寸制成的链传动装置被广泛用于各种应用中,例如汽车、输送机和叉车等起重设备。
链传动系统的两个基本组件是链条和链轮。链条是链节的组合,通过销钉连接。它被围绕在一个或多个齿轮上,这些齿轮通常安装在机器的特定轴上。链条通过在接触链轮的齿面上啮合和滑动,在链轮之间传递运动。
根据用途,可以将链传动中的链条和链轮分为不同类型,包括无声链、板式链和平顶链等。最常用的传动类型是滚子链。同样,链轮的样式也多种多样,可满足各种特殊需求。
为您的应用选择合适的动力传输系统取决于多种因素。尽管链传动相对于齿轮传动和皮带传动具有许多优势,但它们也有链转动无法比拟的优点,如皮带传动中的滑移和摩擦损失在链传动中是最小的。与皮带传动相比,链转动结构紧凑,易于安装,并且能抵抗极端天气条件。但是,在链传动系统中,校准所需的精度比皮带传动的精度更高。当需要连接相对较远的轴时,链传动比齿轮传动更有优势。但是齿轮转动可安装在平行轴和非平行轴上,而链传动装置只能安装在平行轴上。
链传动系统建模
由于各种原因,通常模拟链轮总成,即链传动系统的动力学是一项艰巨的任务。为了模拟链轮传动系统,必须对链传动中的所有相关部件进行建模。但是,由于典型的链传动由多个链节组成,这些链节互相连接并缠绕在多个链轮上,因此,在构建几何结构时就需要大量时间。
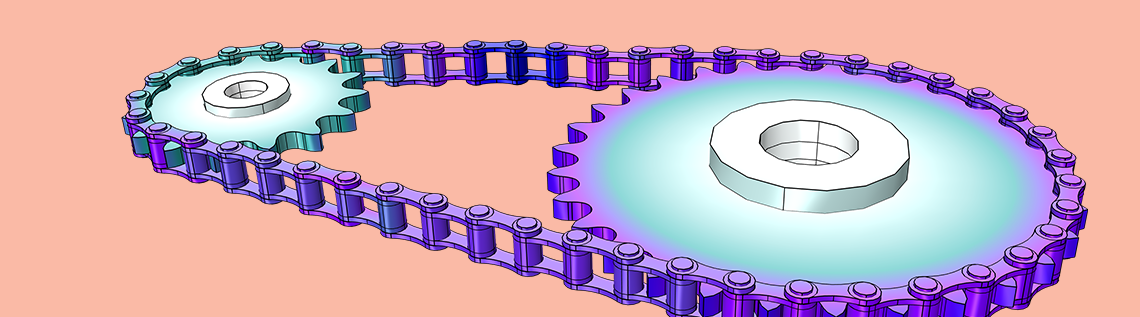
链传动系统的 3D 动画模拟。
即使准确建立了一个链节的几何形状,如何通过合适的方法进行复制构建出整个几何系统也是一个挑战。例如,要模拟链轮与链轮的啮合和松开机制,您需要对链轮齿与接触链节之间的结构接触建模。同样的,在模拟相邻链节之间的旋转(帮助链条匹配和移动链轮)时,建立正确的动力学模型也至关重要。
原则上,您可以使用 COMSOL Multiphysics 的附加产品多体动力学模块中的不同功能来设置链传动系统。但是,手动设置系统每个组件的真实链传动几何形状和相关的物理特性非常耗时且容易出错。为了简化这些步骤,并快速建立链传动模型,COMSOL Multiphysics 在 5.5 版本中新增了相关功能。
使用多体动力学接口中的链传动功能,您只需单击一下按钮,就可轻松添加具有多个物理特性的链传动模型设置。为了简化模型设置,在 5.5 版本中增加了一系列内置几何零件,可用于参数化构建链轮部件的几何。
在本篇博文的第一部分,您将学习如何使用零件库中的内置几何零件来创建自定义的链传动几何形状。第二部分将重点介绍链转动功能如何将几何模型作为输入并自动创建分析所需的各种物理特征。
在 COMSOL Multiphysics® 中构建滚子链的几何结构
为了精确模拟链传动的动力学,必须具有真实的系统几何形状。由于部件数量众多且布局复杂,因此,在大多数实际情况下构建链轮部件的几何并不容易。
如果您已经具有使用 COMSOL Multiphysics 或任何 CAD 软件构建的链传动几何结构,那么可以将其导入 COMSOL Multiphysics,然后继续进行后续分析。但是,导入几何结构的主要缺点是无法在建模中实时修改它们。因此,如果您想要通过更改某些几何参数(例如链节距、宽度、链节的数量或链轮齿的数量)来进行参数研究,导入外部几何可能并不是最佳结构。这就需要使用参数化几何建模,通过调整一组输入参数来修改系统几何的形状和大小。
从 5.5 版开始,COMSOL Multiphysics 提供了一种简单的方法,可以使用零件库中的内置零件创建滚子链、链轮和滚子链轮组件的参数几何模型。借助大量的参数输入设置,您可以自定义链条的形状、大小,链轮和链轮组件,快速创建自己需要的 2D 或 3D 链传动几何结构。由于软件内置了各种可供选择的域和边界条件,因此您可以毫不费力的为这些几何结构设置不同的物理场和边界条件。由内置零件创建几何结构的另一个优点是,如果需要,您还可以将这些几何结构导出为 CAD 格式,以便在 CAD 软件中随时调用。
滚子链轮部件的装配
在学习如何使用内置零件创建几何结构之前,需要重点了解链传动几何结构的不同部件,以及如何将它们组装成一个链转动系统。下面,我们将讨论滚子链、链轮以及它们之间的装配细节。
滚子链
滚子链是通过销接头连接的一系列链节板。如下图所示,典型的 2D 滚子链具有两种类型的链板:
- 辊板
- 销板
连接销接头的设计使销钉之间可以不受限制地相对旋转。一般在辊板和销板之间有弹性衬套。
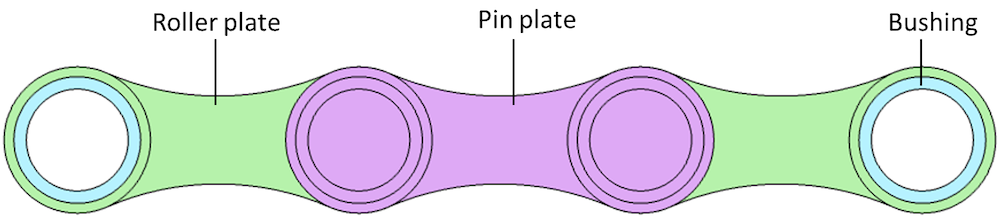
滚子链单元的 2D 组件。
3D 滚子链的组成组件是 3D 链板。其中,辊板由 2 个中空圆柱体组成,并由 2 个侧板连接。类似地,销板是由 2 个侧板连接 2 个实心圆柱体。将实心销板插入 2 个相邻辊板的空心圆柱体中形成链条,从而形成压合连接。这种连接使得各链接之间可以相对旋转,从而将运动从系统的一部分传递到另一部分。您还可以选择,在辊板和销板之间插入弹性衬套。
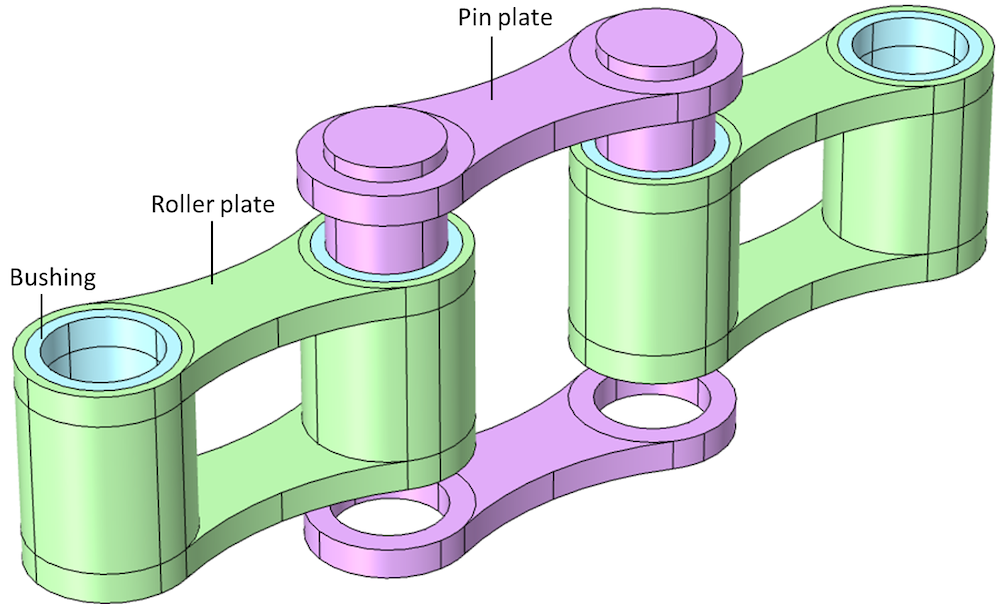
滚子链组件的 3D 分解图。
链轮
创建 2D 模型时,链轮是一个多齿的圆形物体,链条的滚轴在移动时连续地啮合和分离。可以选择创建一个钻孔,这有助于将系统安装在外部组件(例如轴)上。在 3D 建模中,您还可以在链轮的顶侧和底侧都创建一个轮毂。
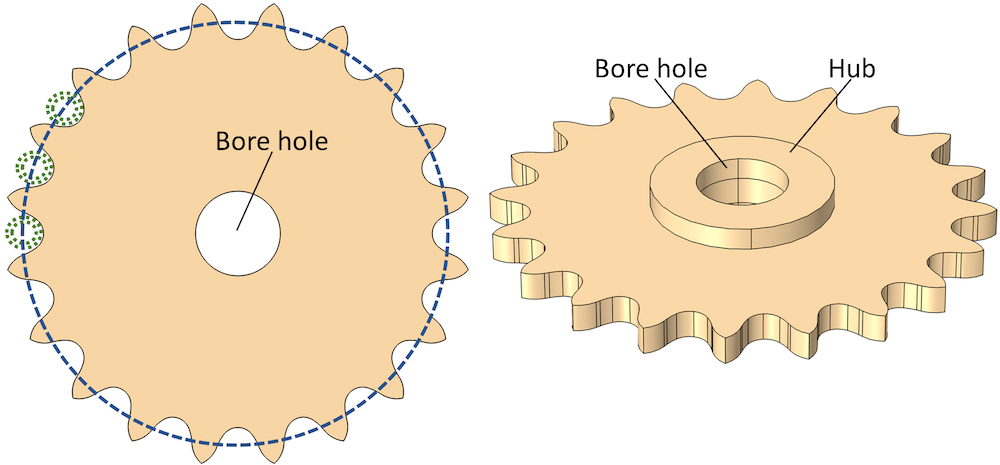
链轮几何的 2D 和 3D 视图。
滚子链轮总成
在建模时,您可以不必总是同时使用链和链轮的几何零件。对于某些特定的建模,您甚至可以单独将滚子链或链轮零件添加到模型中,并将它们与其他组件结合起来以构建一些复杂的模型几何形状。另一方面,如果您想模拟链传动的动态特性,则无需单独添加和组合链条部件;取而代之的是,滚子链链轮总成还有第三个内置部件,该部件有 2D 和 3D 两种形式。如下图所示,在滚子链轮组件部件中,滚子链和链轮的几何零件用于创建系统的几何结构,其中两个链轮通过闭合的链节连接。


滚子链轮组件的 2D 和 3D 视图。
在 COMSOL Multiphysics® 零件库中添加链几何零件
COMSOL Multiphysics 中的零件库包含不同的几何零件,这些零件被划分为不同的分类,可用于各种应用程序。零件库的“多体动力学模块”提供了滚子链和相关的几何零件。打开“零件库”窗口的方法如下图所示,右键单击模型中的“几何”节点,然后从“零件”子菜单中选择“零件库”。
如要将零件添加到模型中,请单击“添加到几何”按钮,该按钮会将选定的零件作为零件实例添加到模型几何中,用于构建参数化几何的零件。零件实例的设置窗口的输入参数列出了建立零件几何的参数列表。您可以修改不同参数的默认值,来构建自己的链传动系统几何模型。还有一些选项可以输入零件的位置和方向。

“多体动力学”模块中的“滚子链”文件夹包含构建不同几何零件的2D和3D几何模型。选择3D中的滚子链轮零件并将它们添加到几何中。

在几何序列中通过添加零件实例滚子链轮部件。“输入参数”列出了此部分的所有参数。
接下来,我们将研究不同输入参数的详细信息,以及如何自定义它们以生成不同类型的滚子链组件。
设置几何参数
市场上售卖的滚子链和链轮通常标识一组数字,用于表示不同组成部分的尺寸。这些编号标记在组件上或随产品一起提供。如果没有这些信息,您还可以测量得到链条和链轮的尺寸。一旦知道了基本几何尺寸,就可以很容易地使用 COMSOL Multiphysics 中的零件库复制它们。利用几何零件的参数特性,您只需要输入最少的一组参数就可以构建链传动几何模型。
内置部件还可以灵活地选择某些特定的几何部件。例如,如果您的系统不包括链节之间的衬套,链轮上的钻孔或链轮顶侧和底侧的轮毂等元素,那么只需要将相关参数设置为零就可以轻松地将它们从最终几何形状中去除。
下面,我们介绍滚子链相关部件中一些重要的参数,以及如何使用它们构建你自己的链传动几何结构。
滚子链参数
在建立滚子链和链轮几何形状所需的所有参数中,节距是最重要的。节距是两个相邻链接的中心之间的距离。许多标准和供应商都使用节距尺寸来标识滚子链。其他链条组件的大小大多使用节距的固定比率设置。为了遵循这一制造惯例,内置零件的输入参数都是无量纲的。
滚子链的一些重要参数包括:
- 节距(p)
- 链环数量(n)
- 链轮宽度与节距比(W)
- 滚子直径与节距比(Dr)
- 销轴直径与节距比(Dp)
- 最小链板宽度与滚子直径比(Wl)
带输入参数的滚子链组件。
通过调整以上参数,可以更改链节的形状和大小。例如,如果要缩小链的几何形状,可以通过更改节距值来快速实现。可以通过修改相应的链节直径参数,也可分别更改滚轮和销板的尺寸为相同的节距值。
左:三个具有不同节距和相同链节直径比的滚子链组件。右:三个具有相同节距和不同链节直径比的滚子链组件。
您可能已经注意到,某些滚子链的侧板的形状是笔直的,而另一些链条是弯曲的。通过更改最小链板宽度与滚子直径之比(Wl),就可以在 COMSOL Multiphysics 中生成直线和弯曲板的几何形状。
三个具有不同侧板形状的滚子链。从左到右:最小链节板宽度与滚子直径之比(W1)分别设置为 0.92、0.6 和 0.25,以制作直线或弯曲形状的滚子链。以上三种情况,由于链接之间没有衬套,可选参数 Db 均设置为零。
链轮参数
为了使链转动系统正常工作,链轮和链条应相互兼容。为了确保这一点,链轮相邻齿的中心之间的距离应与链条的节距保持一致。类似地,应该构建每个链轮齿使其适合链轮。而且链轮的最大宽度应小于内部链节板之间的净距。如果需要,可以设定一个参数使链轮和链板之间增加一些间隙。
链轮的一些重要参数包括:
- 节距(p)
- 齿数(N)
- 链轮齿宽比(Wsp)
- 滚径节距比(Dr)
- 孔径直径与节距直径之比(Dbr)
- 轮毂直径与节距直径之比(Dh)
- 轮毂上/下(Whd)的轮距宽度/节距比
带有输入参数的链轮 2D 和 3D 模型。
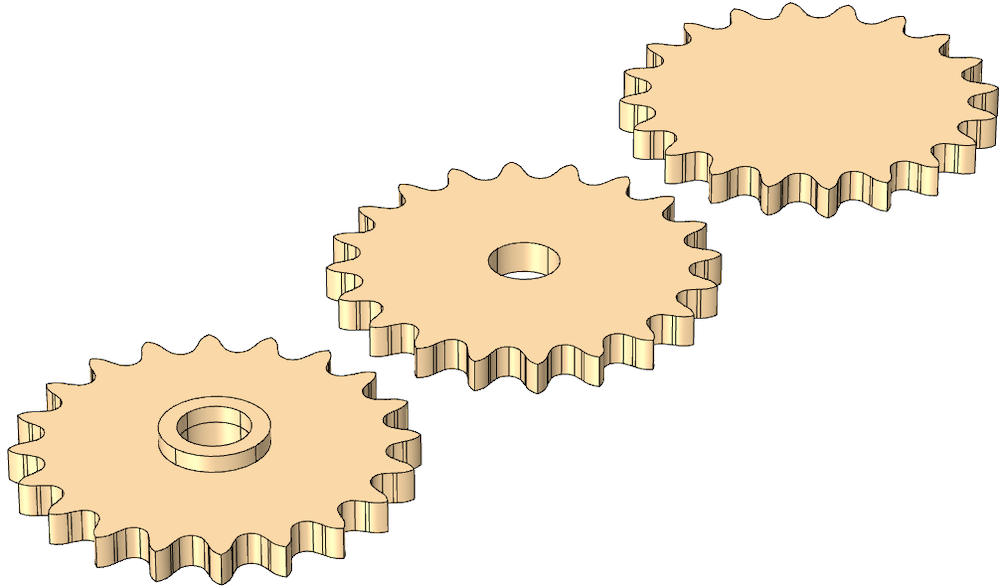
链轮主要由节距和齿数确定。如下图所示,您可以通过更改节距和齿数的组合来构建不同形状的链轮。
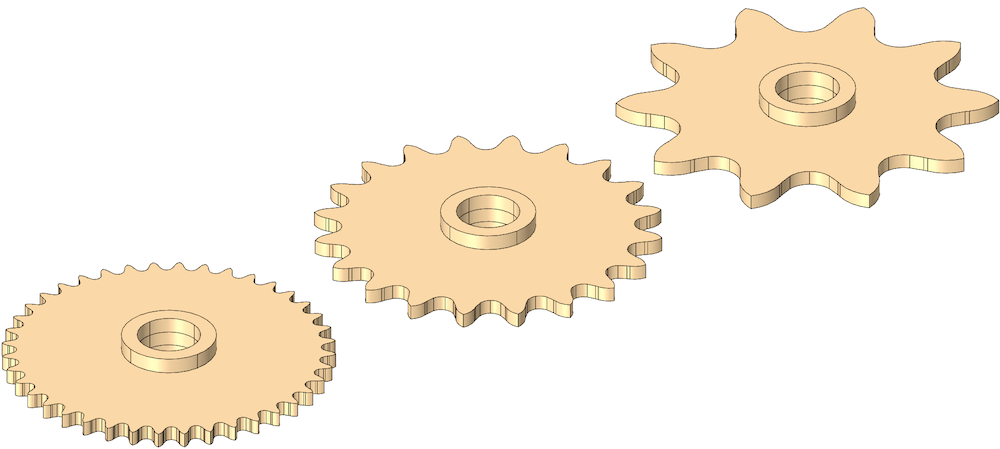
大小相同但齿数不同的三个链轮几何模型。
为了能够安装在轴上,链轮的默认几何形状在顶侧和底侧均包含一个钻孔和轮毂。如下图所示,您也可以选择将相应的参数值设置为零,将它们从几何图形中去除。
具有不同的可选功能的链轮几何形状。左:默认带孔和轮毂的链轮几何形状;中部:顶部和底部无轮毂的链轮几何形状;右:无毂孔的链轮几何形状。
滚子链轮组件参数
除了设置链条和链轮的各个属性所需的上述参数外,滚子链轮组件的零件还具有一些其他参数,主要用于控制装配属性。装配参数包括:
- 链轮中心距(cd)
- 链节数(Nc)
- 第一个链轮齿数(n1)
- 第二个链轮齿数(n2)
- 第一个链轮中心坐标(x0,y0,z0)
- 链轮轴方向(esx,esy,esz)
- 链轮间隙(CLRSP)
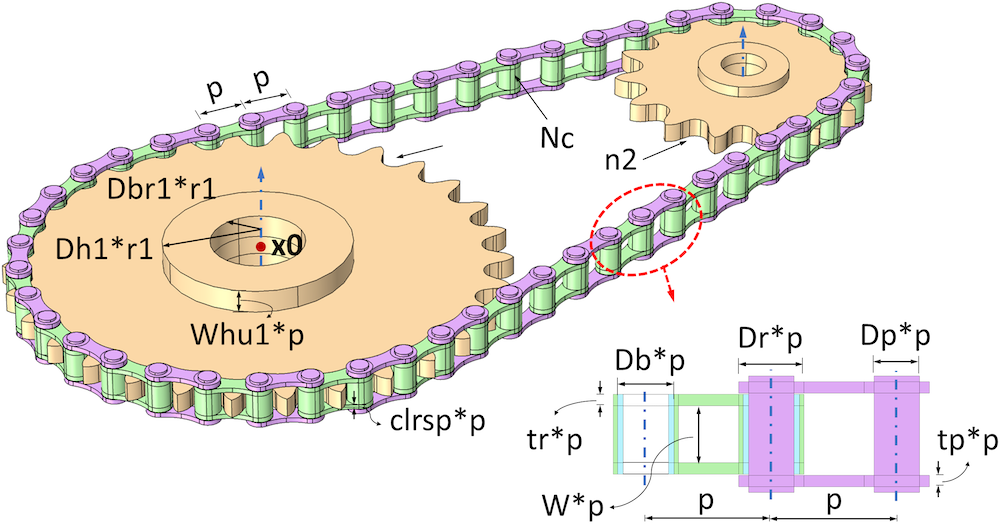
带输入参数的滚子链轮组件 3D 模型。
构建滚子链轮组件的零件变体
在构建链传动时,您可以添加不同类型的约束。假设有这样一种情况,您想在安装在两个固定轴上的链轮之间传递运动。对于此类问题,可能不知道确切的链节数量,而是为给定尺寸和位置的链轮计算其所需的数量。第二种情况,您想使用一个固定长度的链来耦合两个链轮。这时,可以调节链轮位置以适应给定的链条长度。使用不同的滚子链轮组件的零件变量,您可以在 COMSOL® 软件中针对上述两种情况快速建立几何模型。
滚子链轮总成零件有两个零件变量:
- 指定链轮中心距
- 指定链节数
在将滚子链轮零件添加到您的几何模型时,将出现一个选择零件变量的窗口。根据您的输入,可以选择其中之一并将其添加到几何中。
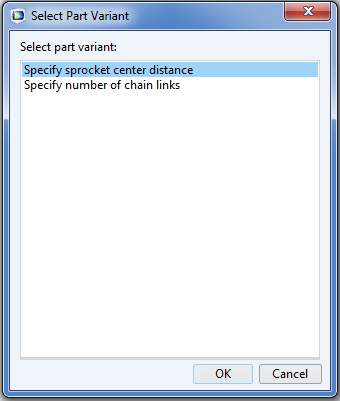
滚子链轮组件的两个零件变体。
对于两个变体,除一个参数外,其他所有的输入参数均相同。如果使用“指定链轮中心距”变体,则需要输入“链轮中心距(cd)”参数。基于此,COMSOL Multiphysics 通过计算两个给定距离的链轮所需的最小偶数连接来构建几何。相反的,如果使用“指定链接数”变量,则需要输入“链节数量(Nc)”参数。COMSOL Multiphysics 还可以通过调整第二个链轮的位置,以使给定数量的链环完美地缠绕在两个链轮上。
请注意,在上述两种情况中,链轮中心距和链节数量的计算均基于非线性方程。因此,链节可能无法紧密地缠绕在链轮上。如果要小幅调整链轮之间的中心距离,请将中心距离校正参数(ccorr)设置为1,然后相应地调整中心距离校正系数(cdelta)的值。
可供选择的链零件
我们已经了解了如何使用内置零件创建各种链传动组件的几何形状。如前所述,这些参数几何模型用于建立分析链传动系统所需的物理框架。为了简化这个过程,在所有与滚子链相关的零件中添加了一组选择。使用这些选项,您可以轻松地将不同的材料分配给不同的组件,设置各种边界条件,以及修改物理设置或后处理步骤。
当您将几何零件添加到模型几何中时,所有可用的选择都会在相应的部分列出,例如,在“零件实例”中“设置”窗口中的“对象选择”,“域选择 ”或“边界选择”。在滚子链轮零件中,为辊板、销板和链轮定义了不同的对象选择和区域选择。类似地,还为辊板、销板和链轮定义了不同的边界选择。下图显示了滚子链轮组件中可用的各种预定义选择。(在链传动建模系列博客的第二篇,您将详细了解这些预定义的选择如何在设置链传动系统中起关键作用)。
要将任何预定义选择添加到模型,请使用“保留”或“物理场”下的复选框。通过选中“保留”下的复选框,可以将相应的选择保留在组件的几何模型中。您可以在定义材料和分配物理场时进行选择,选中“物理场”下的复选框。选择保留非贡献选择 复选框以禁用保留 列,并保留所有不有助于累积选择的选择。

在滚子链轮零件中定义了不同的区域选择和边界选择。图中高亮显示了一个域选择,即由所有链接构成的 选择组。
检查构建的实际几何模型
上述几个参数用于构建链轮和链轮的几何零件。输入这些参数时,需要小心选择允许范围内的合理值。(例如,间距、宽度或链接直径不能为负值。)如果选择不正确,输入参数的某些组合可能会导致不切实际或无效的几何形状。为了避免此问题,在每个零件中都添加了一组“参数检查”节点,这些节点用于检查输入参数及其组合对于有效的几何图形是否可接受。仅当所有参数均通过检查时,才能构建几何形状。否则,系统将显示一条错误消息,其中包含有关如何更正参数的信息。
对于必要的几何参数,在所有零件中添加常规检查是必要的。对不同部件,需要做一些其他重要的检查:
- 滚子链
- 滚子直径必须小于节距
- 销钉直径必须小于滚子直径
- 衬套直径必须小于滚子直径且大于销钉直径
- 链轮
- 齿数必须为正整数
- 内径必须小于外径
- 滚子链轮总成
- 链轮中心距必须大于链轮半径之和
- 第一个链轮的齿数必须大于或等于第二个链轮
如果遇到以上任何错误消息,请尝试相应地修改一些参数并重建几何。
在链传动建模系列的下一篇博客文章中,我们将向您展示如何使用多体动力学模块设置链传动。敬请关注!
下一步
浏览其他资源:
- 了解有关在 COMSOL Multiphysics 中使用几何零件建立模型几何的信息:在 COMSOL Multiphysics® 中使用几何零件和零件库
- 阅读有关齿轮建模的系列博客
- 阅读发布亮点探索 COMSOL Multiphysics 5.5 版本中多体动力学模块的更新特性和功能
编者按:我们已经在本系列博客中发布了后续文章。请在此处阅读:如何在 COMSOL Multiphysics® 中模拟链传动系统。
评论 (4)
庆发 潘
2022-06-11案例源文件,有吗?
Qihang Lin
2022-06-22 COMSOL 员工您好,文章中表明您可以在软件的集合零件库中找到该零件
ZHIYU HU
2023-02-24请问有皮带带动滚轮的用什么方法模拟?没有找到相关的实例
hao huang
2023-02-27 COMSOL 员工您好,本文是链传动建模系列博客的第一部分,我们主要讨论了链传动系统几何生成的细节。在本系列博客的第二部分详细讨论了模拟链条传动系统的方法,详情请参考:http://cn.comsol.com/blogs/how-to-model-a-chain-drive-in-comsol-multiphysics。如果您还有其他问题,请随时联系我们。