变形分析
固体力学中的变形分析
变形分析是研究所有固体力学问题的基础。
通常,人们通过跟踪一定体积材料的平移、旋转和变形过程来建立固体力学方程。这个公式称为拉格朗日公式,它与流体流动分析等许多其他物理领域常用的欧拉公式 完全不同,后者的基本原理以空间固定的控制体积的流入和流出通量为中心。
在有限元分析中,通常使用拉格朗日公式的两种不同变体:
全拉格朗日公式的方程以体的原始构型为基础
更新的拉格朗日公式的方程以体的当前构型为基础
从某种意义上说,这两个公式在数学上是等价的,通过一系列合理的转换方法,这两个公式可以实现相互转换。不过,当涉及有限元公式的数值效率时,这两个公式则各具优势。
这一理论发展的基础是,假设固体材料可以作为连续体,其长度尺度远大于分子尺度,使材料具有均质属性,但从数学角度来看,小到一定程度时可以看作是无穷小。
坐标系和位移
我们使用  坐标来表示材料粒子的原始位置,可以将 视为黏在某个粒子上的标签,贯穿于该粒子的整个变形历史。这种坐标系称为材料坐标系。
坐标来表示材料粒子的原始位置,可以将 视为黏在某个粒子上的标签,贯穿于该粒子的整个变形历史。这种坐标系称为材料坐标系。
经过一段时间  后,该粒子会移动到新位置
后,该粒子会移动到新位置  。为简单起见,我们假设这两组坐标具有相同的原点和方向。
。为简单起见,我们假设这两组坐标具有相同的原点和方向。 坐标位于空间坐标系,这个坐标系在空间中固定,而材料坐标系则在体上固定。
坐标位于空间坐标系,这个坐标系在空间中固定,而材料坐标系则在体上固定。
从体内某个点的原始位置指向其新位置的矢量称为位移矢量  。由于原始坐标是自变量,此时可以得到一个拉格朗日公式。因此,通过位移可以将材料坐标系变换到空间坐标系
。由于原始坐标是自变量,此时可以得到一个拉格朗日公式。因此,通过位移可以将材料坐标系变换到空间坐标系  。
。
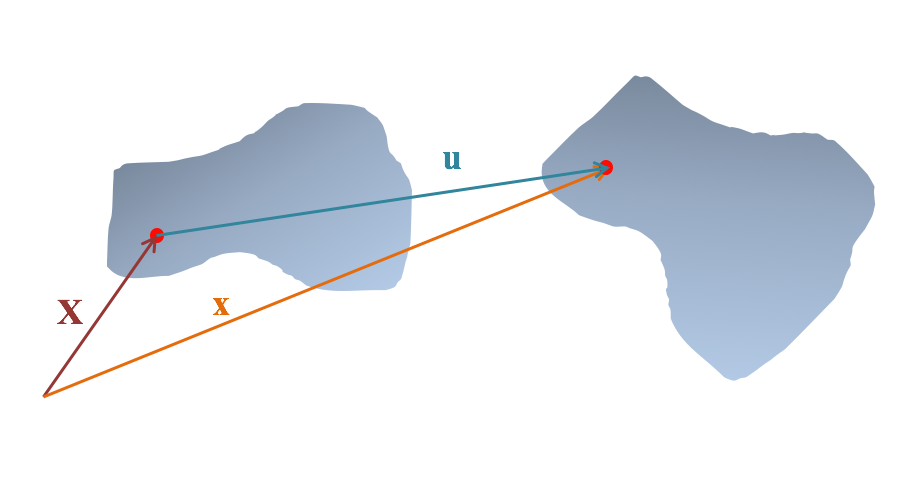 某一点的材料坐标与空间坐标之间的关系。
某一点的材料坐标与空间坐标之间的关系。
某一点的材料坐标与空间坐标之间的关系。
某一点的材料坐标与空间坐标之间的关系。
只要位移场不仅仅表示刚体运动,材料形状就会发生局部变化,称为应变 或伸长。这些变化可能包含局部小域的体积或形状变化。应变会在材料中产生内力(应力),甚至可能造成材料失效。为了准确描述材料特性,必须在不考虑刚体运动等因素的情况下描述变形。我们可以通过多种方式来描述材料的变形过程,下面进行详细论述。
变形梯度
变形梯度  定义为
定义为

其中, 是等同张量,展开为矩阵形式
是等同张量,展开为矩阵形式

变形梯度包含有关材料局部旋转和变形的完整信息。其中还显示其他一些信息,例如,由于  ,未变形体
,未变形体  中的小线段如何旋转并拉伸,成为变形体
中的小线段如何旋转并拉伸,成为变形体  中的线段。我们将 张量看作是一个矩阵,第一列提供线段最初沿 X 方向的大小和方向等信息。从数学角度来看, 是从 变换到 的雅可比矩阵,因此它的行列式
中的线段。我们将 张量看作是一个矩阵,第一列提供线段最初沿 X 方向的大小和方向等信息。从数学角度来看, 是从 变换到 的雅可比矩阵,因此它的行列式  为局部体积比例因子。对于不可压缩材料,
为局部体积比例因子。对于不可压缩材料, 。
。
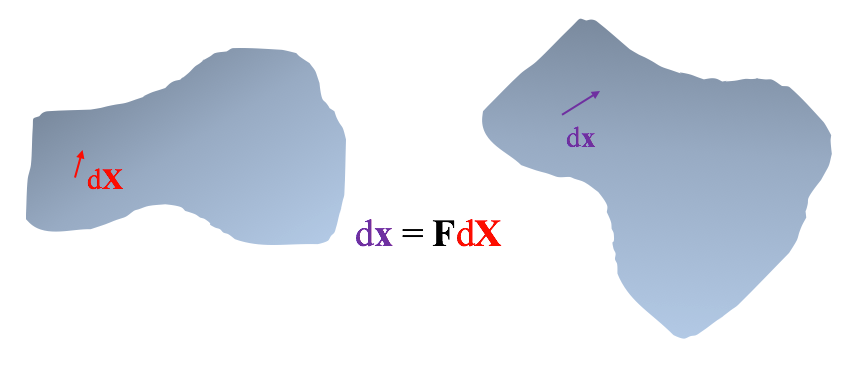 无穷小线段因变形梯度产生拉伸和旋转。
无穷小线段因变形梯度产生拉伸和旋转。
无穷小线段因变形梯度产生拉伸和旋转。
无穷小线段因变形梯度产生拉伸和旋转。
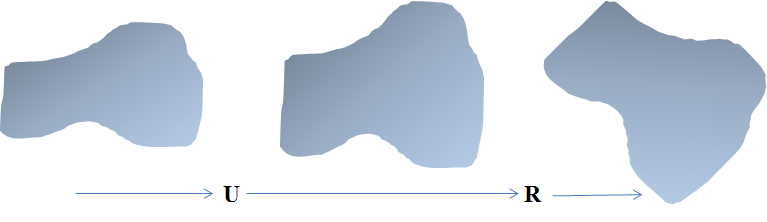
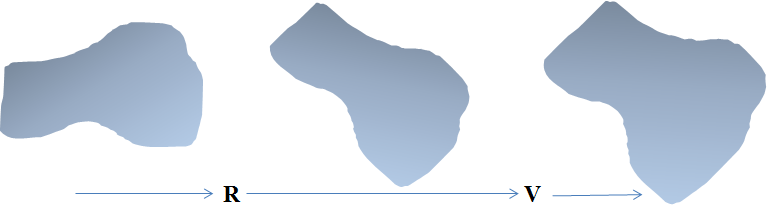
极分解定理 表明,任何二阶张量都可以分解为纯转动和对称张量的乘积,因此,利用这一定理可以将刚体转动与变形分开:

这可以解释为先发生变形(由右伸长张量  描述),然后再进行刚性旋转(由纯旋转矩阵
描述),然后再进行刚性旋转(由纯旋转矩阵  描述)。如此一来,如果没有旋转,右伸长张量则为变形梯度,因此 的解释与 类似。
描述)。如此一来,如果没有旋转,右伸长张量则为变形梯度,因此 的解释与 类似。
 分解为先发生变形,后进行旋转。
分解为先发生变形,后进行旋转。
分解为先发生变形,后进行旋转。
分解为先发生变形,后进行旋转。
同样也可以将变形梯度分解为

在此过程中,首先发生刚体转动,然后,转动的体发生变形。变形通过左伸长张量  进行描述。
进行描述。
 分解为先进行旋转,后发生变形。
分解为先进行旋转,后发生变形。
分解为先进行旋转,后发生变形。
分解为先进行旋转,后发生变形。
这两个伸长张量通过纯转动进行关联;例如  。事实上,此处旋转矩阵的转置也是其自身的逆(
。事实上,此处旋转矩阵的转置也是其自身的逆( )。
)。
在实际操作中,极分解的计算成本往往较高,因此,人们会尽量避免执行此类计算。但在理论思考方面,这一概念非常有用。
我们可以在并不确定旋转矩阵的情况下,计算与旋转无关的变形测度:

张量  称为右柯西-格林变形张量。
称为右柯西-格林变形张量。
这个张量常用于描述超弹性材料的本构特性等,由于它仅由 张量构成,因此用于描述材料在旋转“之前”的变形。
同样,

张量  称为左柯西-格林变形张量。
称为左柯西-格林变形张量。
和 都与旋转无关,但它们描述的是两个不同坐标系中的变形。张量 是描述材料坐标系中变形的材料张量, 是描述空间坐标系中变形的空间张量。
伸长率
从非正式意义上说,伸长率可定义为当前长度与原始长度之比,

因此,在未变形状态下,伸长率为 1。
一般情况下,人们更倾向于使用张量 和 的特征值。 的三个特征值( 、
、 和
和  )称为主伸长率,其对应的特征矢量在材料坐标系中给出三个正交方向。如果我们研究一个小立方体(正方体),其中三条边沿着这三个方向,则它将发生变形,成为长方体,但所有边仍保持直角相交。边长变化由主伸长率表示。
)称为主伸长率,其对应的特征矢量在材料坐标系中给出三个正交方向。如果我们研究一个小立方体(正方体),其中三条边沿着这三个方向,则它将发生变形,成为长方体,但所有边仍保持直角相交。边长变化由主伸长率表示。
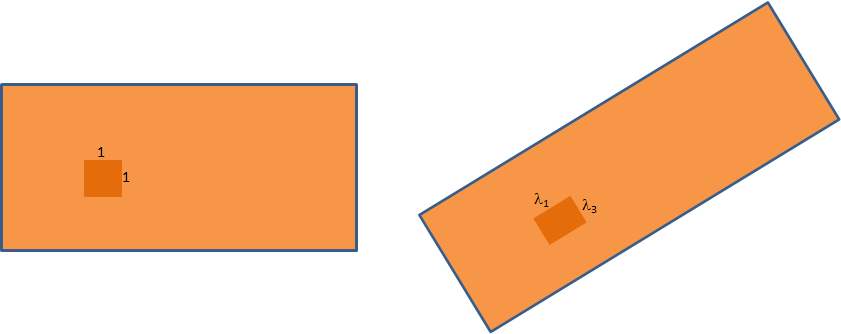 主伸长率(假设厚度不变,因此 λ2 = 1)。
主伸长率(假设厚度不变,因此 λ2 = 1)。
主伸长率(假设厚度不变,因此 λ2 = 1)。
主伸长率(假设厚度不变,因此 λ2 = 1)。
如此一来,体积变化可以写为主伸长率的乘积:

张量 的计算更为简便,它的主方向与 相同,但特征值为  、
、 和
和  。因此,通常使用 而非 来计算主伸长率。
。因此,通常使用 而非 来计算主伸长率。
对于未变形材料(仅产生刚体运动), 。这一事实解释了为什么在实际中,人们主要使用 来描述类似橡胶这种具有较大伸缩性的材料。对于金属类材料,应变阶数通常介于
。这一事实解释了为什么在实际中,人们主要使用 来描述类似橡胶这种具有较大伸缩性的材料。对于金属类材料,应变阶数通常介于  到
到  之间。如果要使用伸长率来测量材料应变,则可以使用 0.99 到 1.01,甚至 0.9999 到 1.0001 范围的伸长率来描述变形。
之间。如果要使用伸长率来测量材料应变,则可以使用 0.99 到 1.01,甚至 0.9999 到 1.0001 范围的伸长率来描述变形。
左柯西-格林变形张量 也具有主伸长率作为特征值。但由于 描述刚体转动之后的伸长率,因此主方向根据空间方向来确定。
应变张量
要得到基于零的变形测量值,需要从 中减去等同张量,从而得到格林-拉格朗日应变张量  ,定义为
,定义为

该张量也描述材料在发生任何转动之前产生的变形,但在未变形状态下的所有分量均为零。其分量形式可以写为

其中假设对重复指标求和(爱因斯坦求和约定 )。
格林-拉格朗日应变张量的对角元素示例如下

非对角元素的示例为

格林-拉格朗日应变张量的特征值称为主应变,其方向(材料坐标系)与主伸长率相同。
当应变和刚体转动幅度都很小时,格林-拉格朗日应变张量中的二次项可以忽略不计。由此可以得到众所周知的工程应变张量,

其分量示例如下

和

该应变张量的对角项称为法向应变 或正应变,用于描述沿每个坐标轴的延伸。非对角项是应变张量的剪切分量,用于描述线段之间夹角的变化。这里的术语很容易被混淆,因为在工程领域,由于  直接测量角度的变化(以弧度表示),所以人们习惯使用“剪切应变”一词来描述物理量
直接测量角度的变化(以弧度表示),所以人们习惯使用“剪切应变”一词来描述物理量  。
。
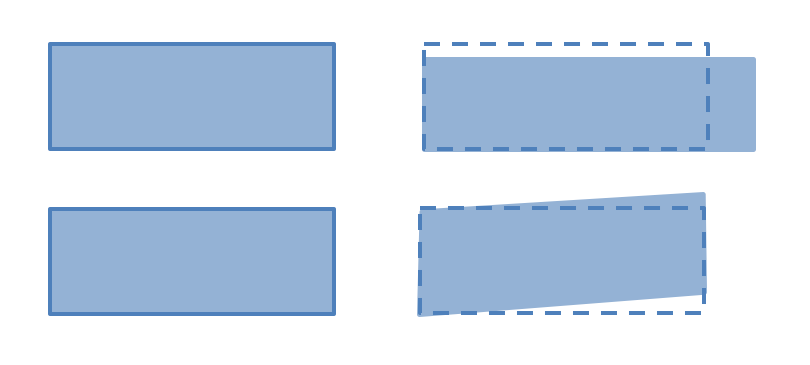 正应变(上)和剪切应变(下)。
正应变(上)和剪切应变(下)。
正应变(上)和剪切应变(下)。
正应变(上)和剪切应变(下)。
剪切应变产生等体积 变形;即变形不引起体积改变。对于小应变,相对体积变化通过正应变之和求得:

改变视角
如果我们从变形后的形状着手分析,就可以发展出相似的理论。这里不作详细讨论,但其中的步骤是类似的。原始位置和位移可以视为当前位置的函数  ,因此所有导数均为对空间坐标的导数。变形后具有当前长度的线段,其原点位于线段 上,后者可以通过
,因此所有导数均为对空间坐标的导数。变形后具有当前长度的线段,其原点位于线段 上,后者可以通过  来定位。
来定位。
阿尔曼西应变张量 定义为

其分量可写为

请注意,这里是对空间坐标取导数。
真实应变
有时,我们会使用真实应变 这个术语。在真实应变的单轴定义中,应变增量定义为

真实应变的定义基于当前长度,因此在积分后可以得到

这就是真实应变也称为对数应变 的原因。推广到三维就称为 Hencky 应变 张量,

应变测度的比较
如果将初始长度为  的棒材拉伸(或压缩)一定的距离
的棒材拉伸(或压缩)一定的距离  ,可以得到多个不同的轴向应变测量结果,如下所示。
,可以得到多个不同的轴向应变测量结果,如下所示。
工程应变:

伸长率:

格林-拉格朗日应变:

阿尔曼西应变:

真实应变:

在下图中,我们可以看到,所有应变测度的结果都吻合良好,其差异不超过 ±10%%,但在应变较大时,差异就变得非常明显。工程应变和伸长率都与变形成正比,二者仅在纵轴方向有所不同。
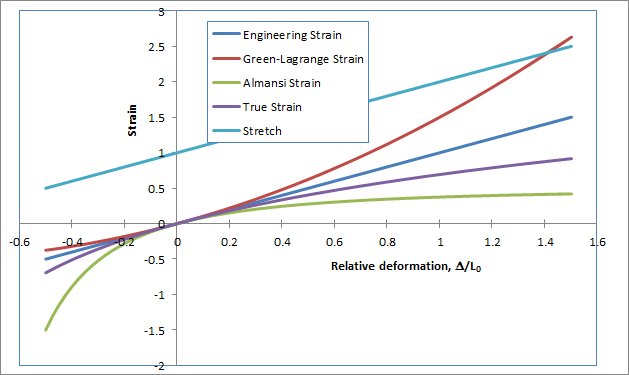 不同应变测量结果的比较。
不同应变测量结果的比较。
不同应变测量结果的比较。
不同应变测量结果的比较。
应变协调性
由于应变张量由位移的导数构成,因此并非所有应变场均适用。位移矢量只有三个分量,这意味着,除非各个应变分量都满足特定的协调性标准,否则它们的积分无法给出唯一的一组位移。工程应变必须满足以下方程:

由于应变张量的对称性,这 81 个方程中只有 6 个是非平凡方程。如下所示

应变的速度梯度和时间导数
与变形梯度相关的量还包括速度梯度,它定义为速度矢量的空间梯度,

速度梯度可以分解为对称部分和反对称部分,分别称为应变率张量 和自旋张量:

速度梯度与变形梯度的时间导数之间存在一个重要的关系式:

通过使用这一结果,格林-拉格朗日应变的时间导数也可以用速度梯度表示,

最后一个等式基于应变张量的对称性。
变形分析示例:刚体转动
我们来看一个刚体在 xy 平面转动某个角度  的例子:
的例子:
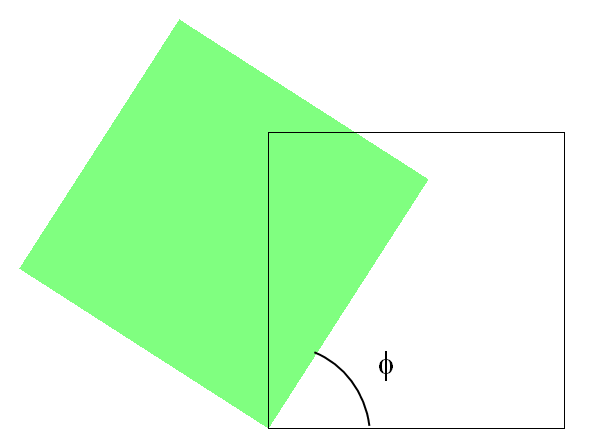
如果假设坐标系原点位于左下角,则某个点 (x, y) 的新位置可以写为原始坐标 (X, Y) 的函数,即

由此得到位移为

然后,我们可以根据变形梯度的定义进行计算,得到

从而得到右柯西-格林张量

同理可得,左柯西-格林张量为  。根据定义可以看出,格林-拉格朗日应变张量和阿尔曼西应变张量均为零。此外,由于所有主伸长率的值都为 1,可推断出 Hencky 应变张量为零。
。根据定义可以看出,格林-拉格朗日应变张量和阿尔曼西应变张量均为零。此外,由于所有主伸长率的值都为 1,可推断出 Hencky 应变张量为零。
但是,工程应变张量包含以下值

对于小角度转动,采用级数展开可以得到

初看上去,上式的误差很小。然而,即使是很小的数值,已经预示着较大的应变。在金属中,通常在应变阶数为 0.01%% 时便会产生实质性的应力。这意味着,使用工程应变张量将引起明显的误差,即使刚体转动 1°也是如此。
变形分析示例:大剪切
一个正方形按某个角度  发生剪切变形后,成为一个平行四边形,如下图所示,其中没有面外变形。
发生剪切变形后,成为一个平行四边形,如下图所示,其中没有面外变形。
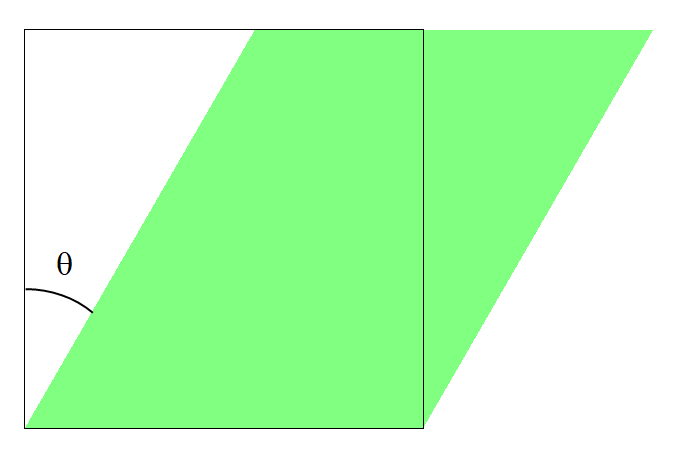
简单剪切。
简单剪切。
从材料坐标系到空间坐标系的映射为(Z 表示面外方向):

表达式  表示剪切量,可以给出以下位移场
表示剪切量,可以给出以下位移场

进而得到变形梯度

我们立即可以得出  ,因此变形前后的体积不变。这一结果也与上图中我们的预期相符,因为原始正方形在变形为平行四边形后,面积也保持不变。
,因此变形前后的体积不变。这一结果也与上图中我们的预期相符,因为原始正方形在变形为平行四边形后,面积也保持不变。
右柯西-格林伸长张量和格林-拉格朗日应变张量分别为

和

我们可以对格林-拉格朗日应变张量的对角元素进行解释。最初沿 X 轴的纤维未延伸,而沿 Y 轴的纤维被拉伸。但是,此纤维的新长度不能直接从应变张量中提取。
对于较小的角度  和
和  ,可以得到纯剪切的工程应变张量:
,可以得到纯剪切的工程应变张量:

稍作努力,我们就可以计算出  的极分解。通过设置
的极分解。通过设置  ,可以得到
,可以得到

和

其中  。
。
主伸长率是 的特征值,通常按降序排列,如下所示

由于没有面外伸长,第二主伸长率为  。
。
右伸长张量 的特征矢量为主伸长轴。在本例中,这些特征矢量可以表示为
 ,
, 和
和 
为了进一步从数值角度研究此问题,我们将剪切角度设为  ,由此可得
,由此可得  、
、 以及
以及  。变形梯度则变为
。变形梯度则变为

由于  ,可以通过数值方法从旋转矩阵中得到刚性转动部分 。
,可以通过数值方法从旋转矩阵中得到刚性转动部分 。
主伸长率为

第一主伸长轴的方向与水平轴呈 58.3°角。
在下图中,变形被分解为纯拉伸和纯旋转。蓝色正方形的方向与主伸长方向一致;即,也旋转了 58.3°。可以看到,伸长后的正方形呈纯矩形,并且在分解位移的拉伸过程中方向保持不变。
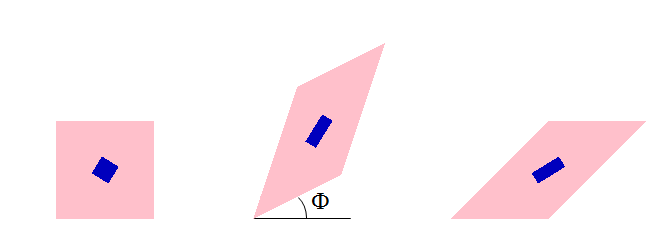 原始构型(左)、仅拉伸(中)以及拉伸后旋转(右)。
原始构型(左)、仅拉伸(中)以及拉伸后旋转(右)。
原始构型(左)、仅拉伸(中)以及拉伸后旋转(右)。
原始构型(左)、仅拉伸(中)以及拉伸后旋转(右)。
上次修改日期:2021 年 3 月 11 日