多体动力学模块更新
COMSOL Multiphysics® 5.6 版本为“多体动力学模块”的用户提供了新的方法来模拟刚体接触和摩擦,引入了间隙关节,并支持自动创建关节。请阅读以下内容,进一步了解“多体动力学”的新增功能和其他更新功能。
刚体接触和摩擦
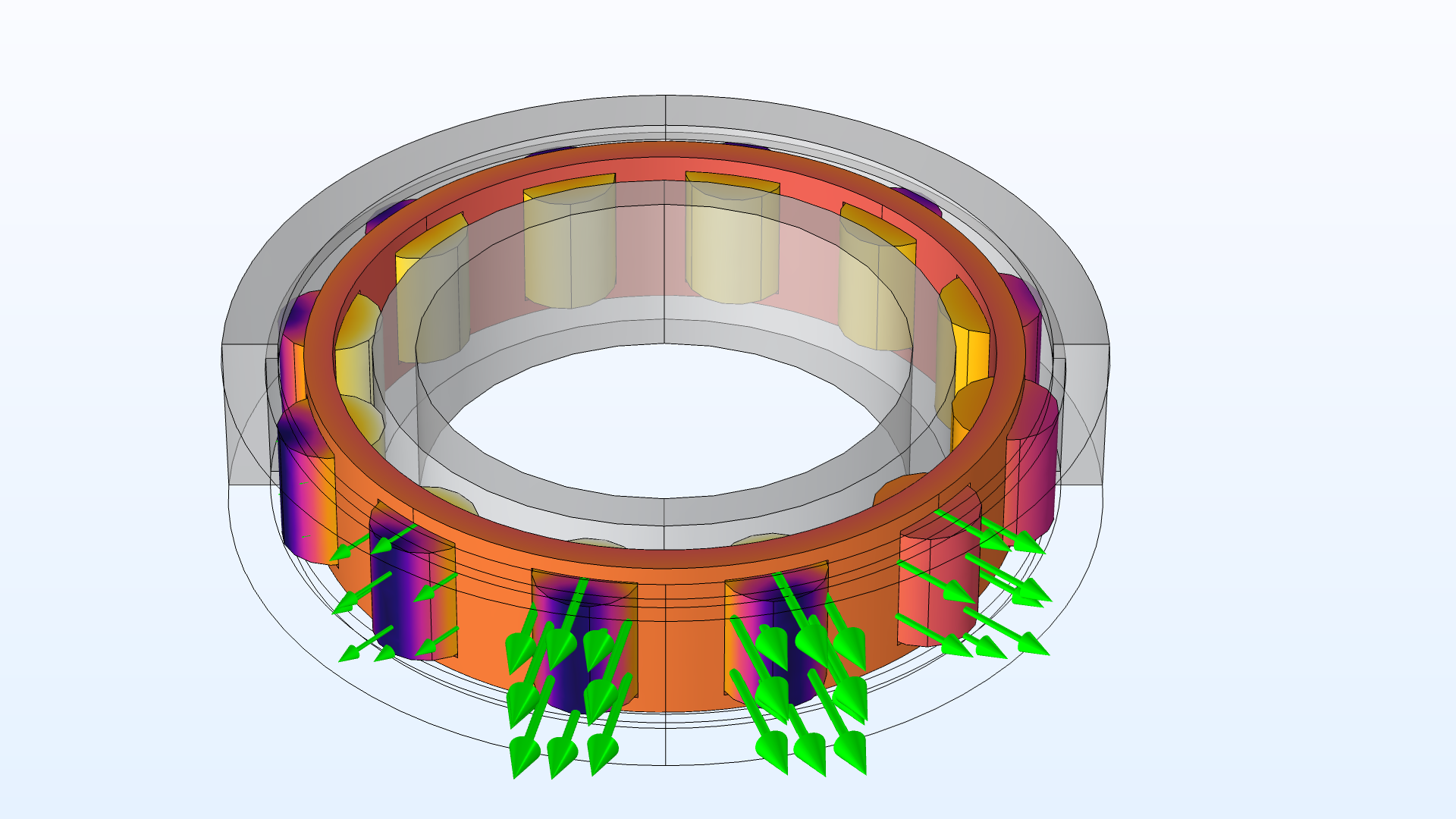
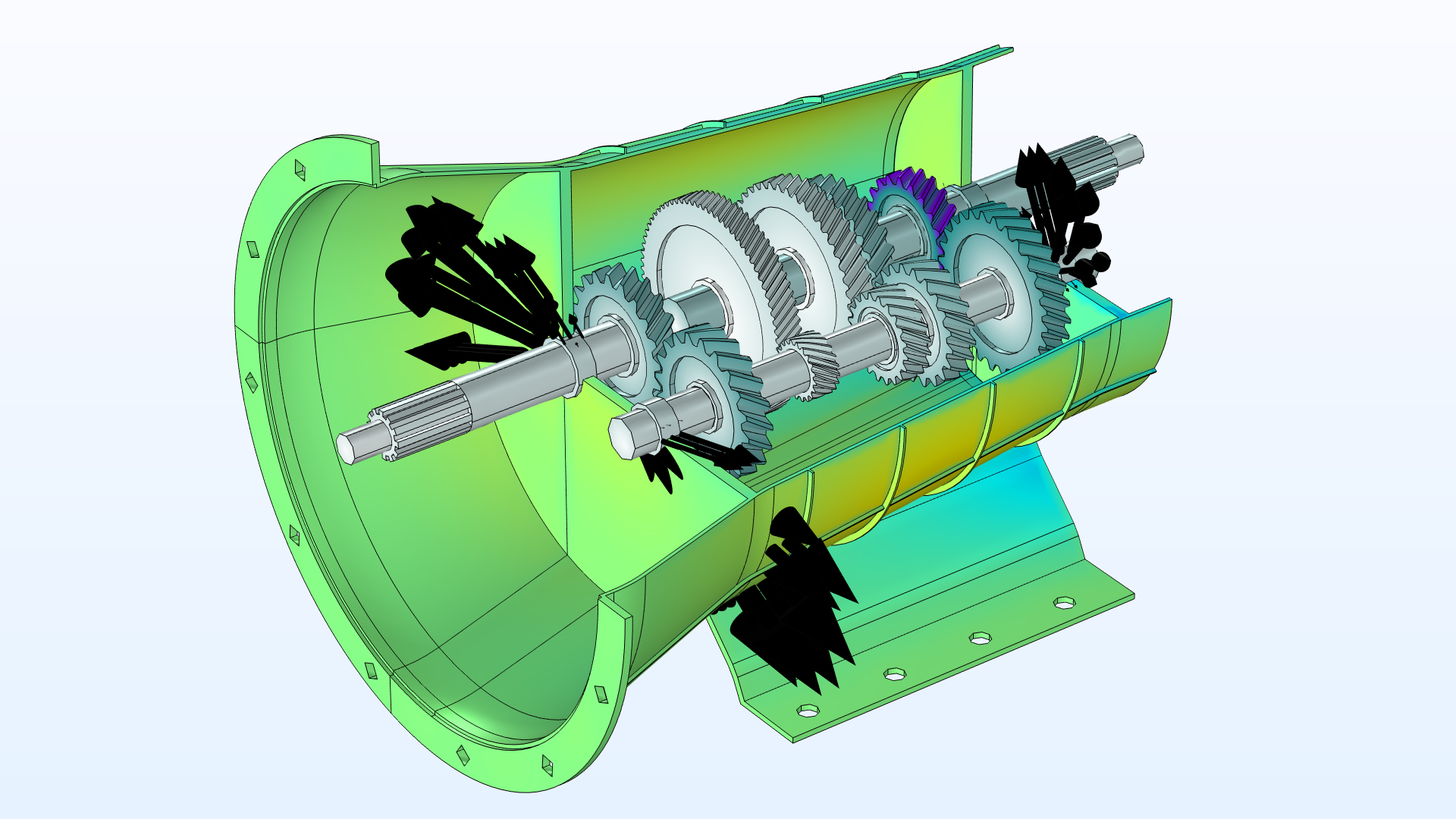
多体动力学 接口中添加了一种新的方法来模拟刚体之间的接触,可用于刚体接触 节点,对标准形状的刚体之间的无网格接触进行建模。在此版本中,该方法支持球-球 和球-任意 类型的接触,前者允许其中一个球体是空心的,且内部凹边界作为接触面。您可以选择接触公式作为罚函数 或罚函数,动力学,并使用瞬态研究的平滑且数值稳定的连续摩擦定律对摩擦力进行建模。您可以在新的圆柱滚子轴承的动力学教学案例中查看此功能的应用演示。
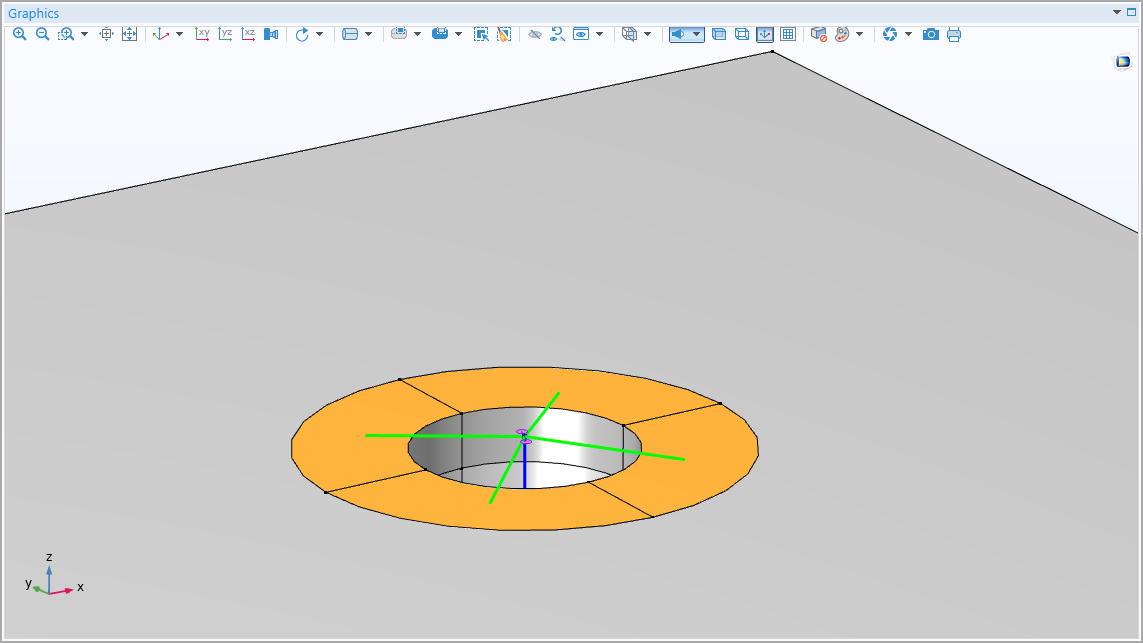
圆柱滚子轴承中的刚体接触和摩擦,其中使用绿色箭头显示接触力方向和相对大小。
间隙关节
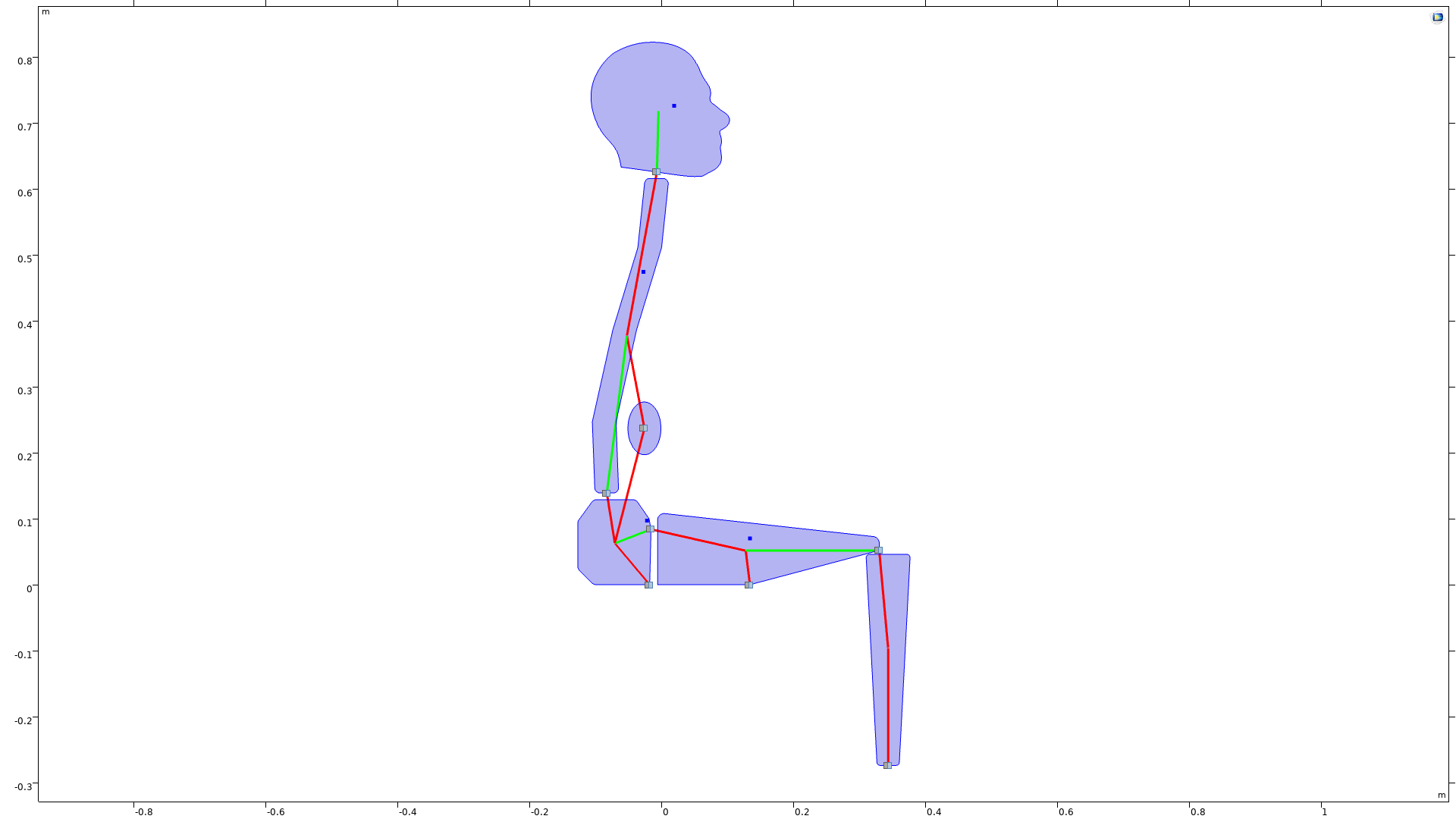
在现实生活中,关节并不总是完美地配合,而是在两个零件之间有一定的间隙。您可以使用多体动力学 接口中新增的间隙关节 节点对非理想关节进行建模,这种新的关节类型允许在间隙距离内沿所有平动自由度运动,其中使用罚函数法来强制施加距离约束。此外,它还允许沿两个连接件之间的旋转自由度运动,在三维中表现为球关节,在二维中表现为铰链关节。您可以在新的具有关节间隙的曲柄滑块机构教学案例中查看此功能的应用演示。
曲柄滑块机构中的间隙关节建模。在两个连接部件之间可以观察到间隙距离内的相对平移和旋转。
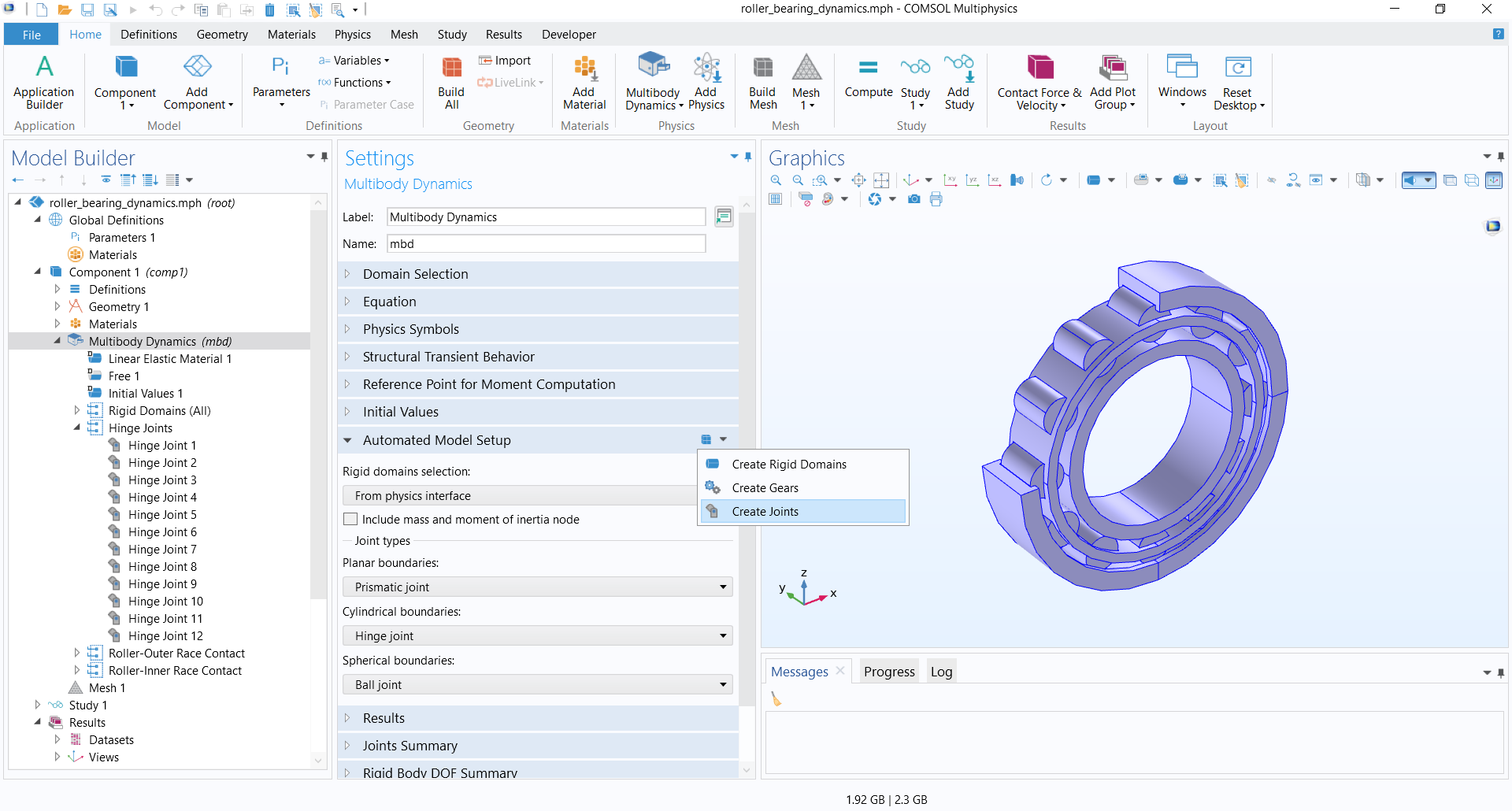
基于几何自动创建关节
现在,您可以基于几何装配自动创建关节,这使得大型多体系统的建模变得更加容易。多体动力学 接口的自动模型设置 栏中添加了新的创建关节 按钮,可用于自动为装配中的几何对象创建关节,并在其间形成一致对。默认情况下,软件会分别为平面、圆柱形和球形边界创建棱柱、铰链和球关节。此外,还支持为特定类型的边界选择其他任何适当的关节。对于以这种方式创建的关节,软件会自动指派源、目标、中心和轴信息。您可以在以下模型中查看此功能的应用演示:
- three_-_cylinder_reciprocating_engine
- reciprocating_engine_with_hydrodynamic_bearings
- slider_crank_mechanism_with_joint_clearance(新模型)
- dynamics_of_a_cylindrical_roller_bearing(新模型)
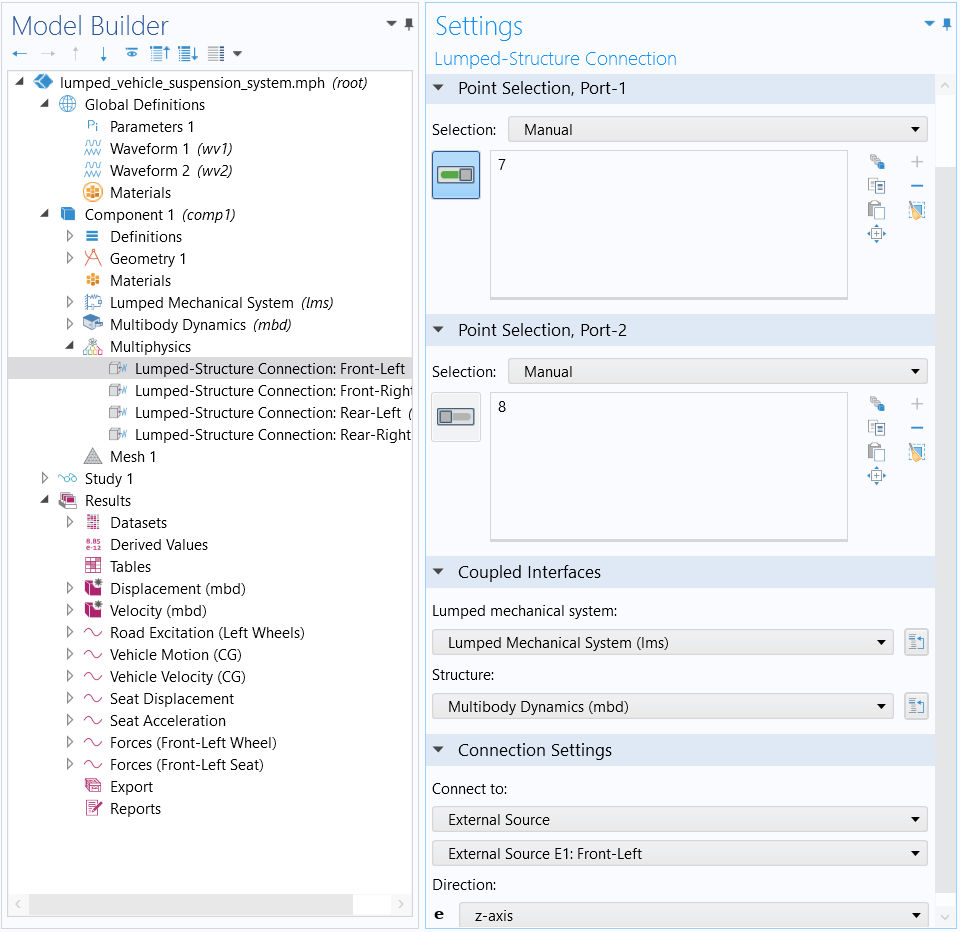
集总-结构连接耦合
此版本添加了新的多物理场耦合集总-结构连接,用于将使用集总机械系统 接口建模的集总系统连接到使用任何结构力学接口构建的有限元模型。集总机械系统 接口中的连接可以通过外部源 节点或位移节点 来建立,具体取决于有限元组件包含两个端口还是只有一个端口。您可以在车辆悬挂系统集总模型教学案例中查看此功能的应用演示。
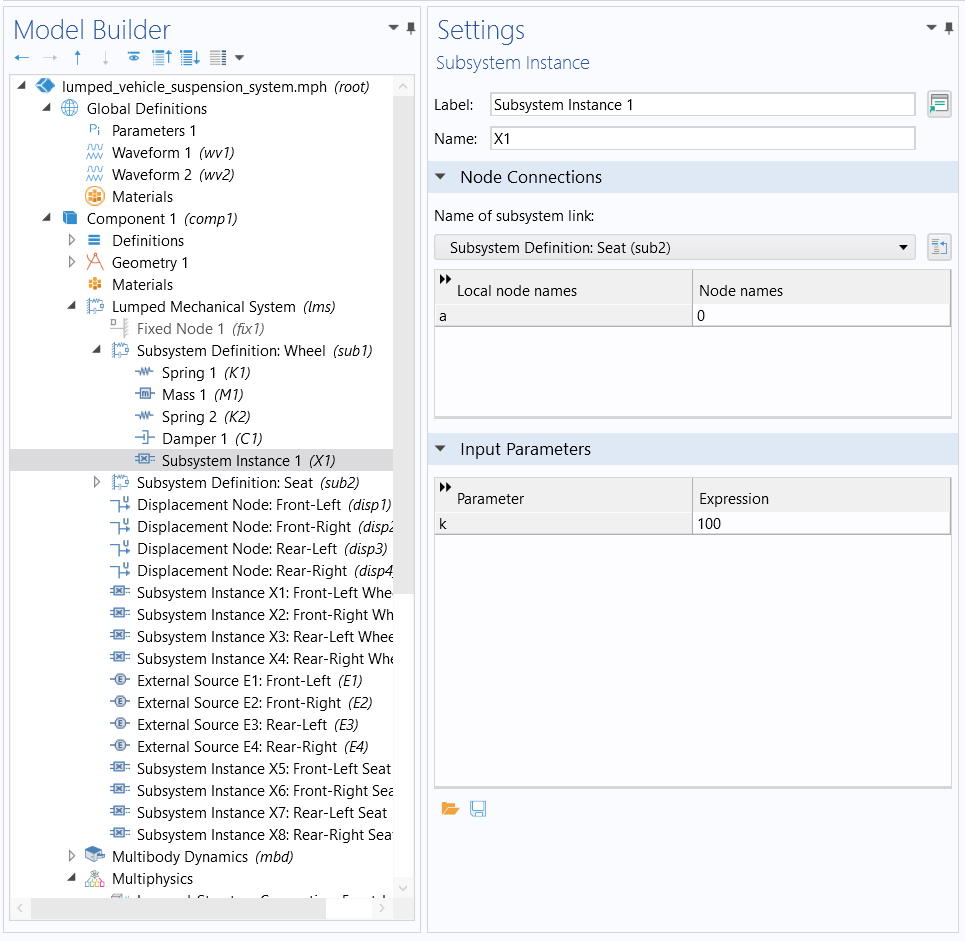
集总机械系统建模增强功能
集总机械系统 建模功能在许多方面得到了改进,现在支持嵌套和参数化子系统。嵌套使较复杂系统的建模变得更加容易,而参数化则允许创建更为通用的子系统模型。新的输入参数 栏已添加到子系统定义 和子系统实例 节点中,同一模型中的多个子系统实例可以与不同的输入参数一起使用。
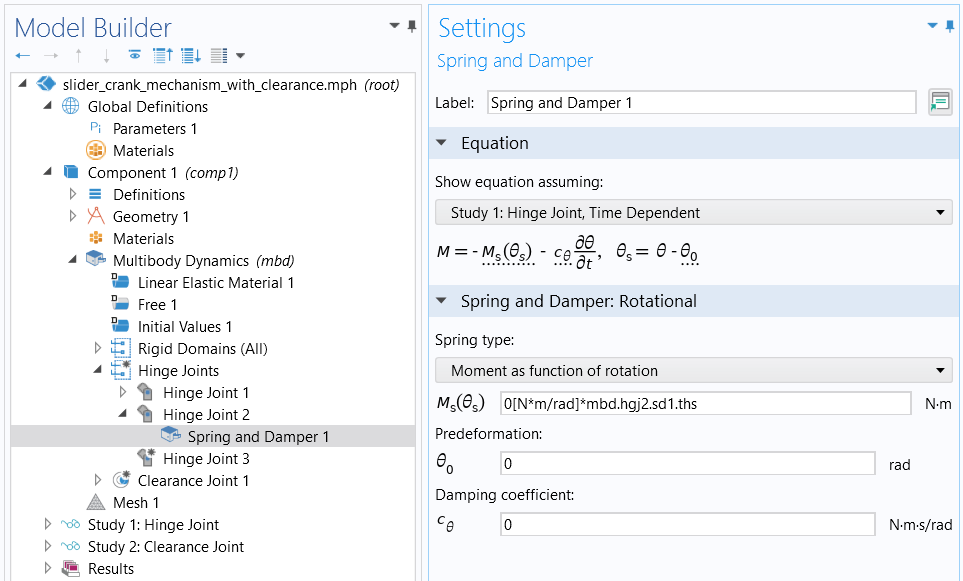
关节中的非线性弹簧
新的弹簧类型 选项已添加到多体动力学 接口的所有关节 节点的弹簧阻尼器 子节点中。除了用于指定弹簧常数 的现有选项以外,新的弹簧类型 选项还允许指定力表示为伸长部分的函数。利用此功能,您可以通过将弹簧力编写为伸长部分的函数,模拟连接到关节的非线性弹簧。在具有旋转自由度的关节中,您可以改为指定力矩作为旋转的函数。
关节的物理符号
新版本为多体动力学 接口中的所有关节 节点添加了物理符号。每种关节类型使用的物理符号都不相同,这些符号放置在关节中心。此外,软件还支持绘制从关节中心到所有源和目标中心的连接线。
动态接触
新的动态接触算法显著改善了瞬态接触事件期间的动量和能量守恒。这意味着,您可以使用远大于先前版本的时间步来精确模拟瞬态接触问题。通过在接触 节点中选择罚函数,动力学 或增广拉格朗日,动力学 公式,可以使用新方法。您可以在新的两个软环之间的碰撞和高尔夫球的冲击分析教学案例中查看此功能的应用演示。
磨损仿真
新版本在固体力学 和多体动力学 接口的接触 节点下,以新的磨损 节点的形式添加了用于机械磨损建模的方法。磨损率基于广义 Archard 方程进行计算。磨损建模有两种算法:对于一般的磨损,以及由于磨损引起的任意几何变化,可以使用变形几何方法;另一种简化的方法是,将磨损合并到接触间隙的偏移中。您可以在新的盘式刹车片磨损教学案例中查看磨损 特征的应用演示。
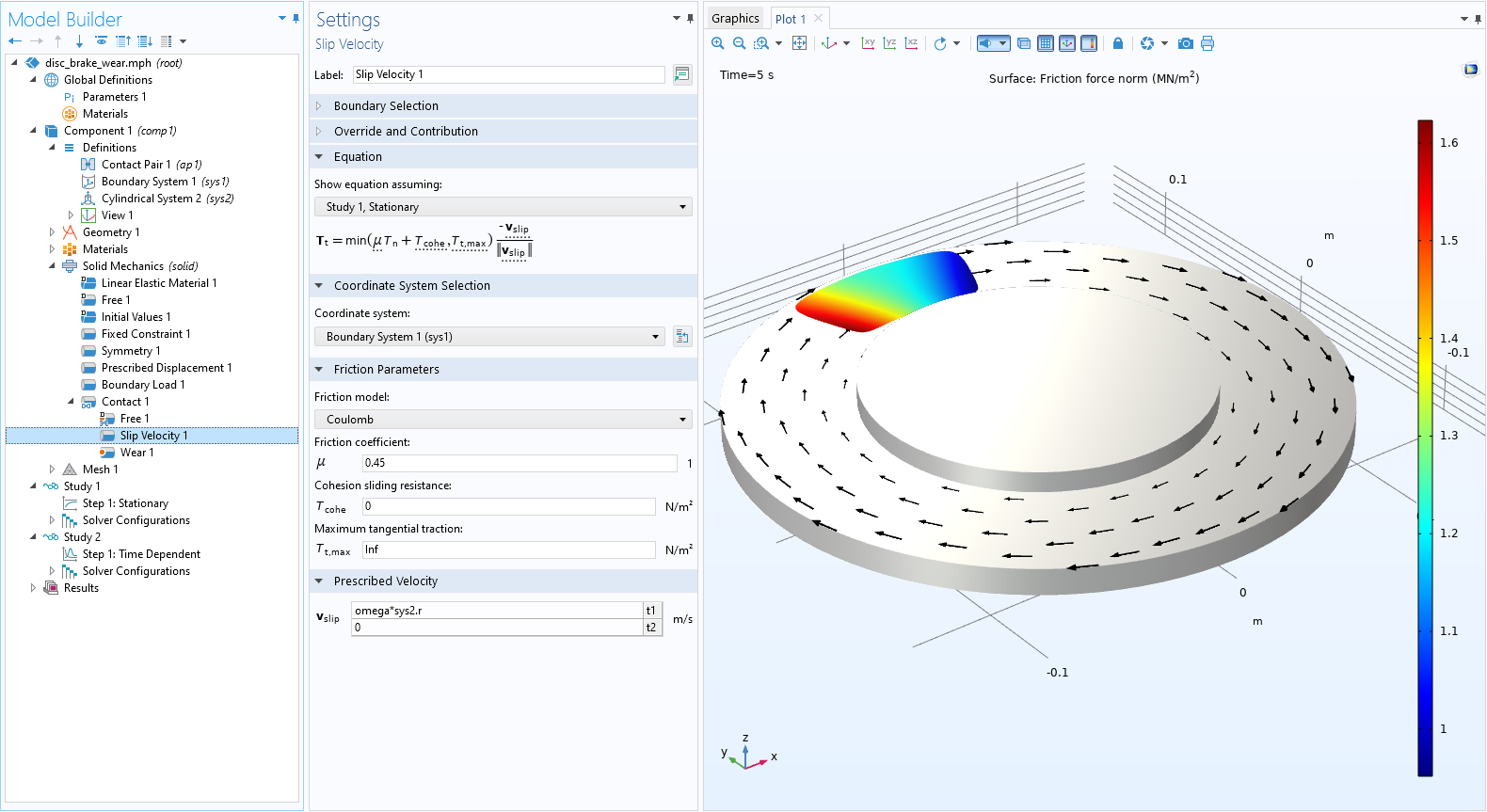
盘式刹车片磨损的进展情况(速度箭头仅用于可视化目的)。
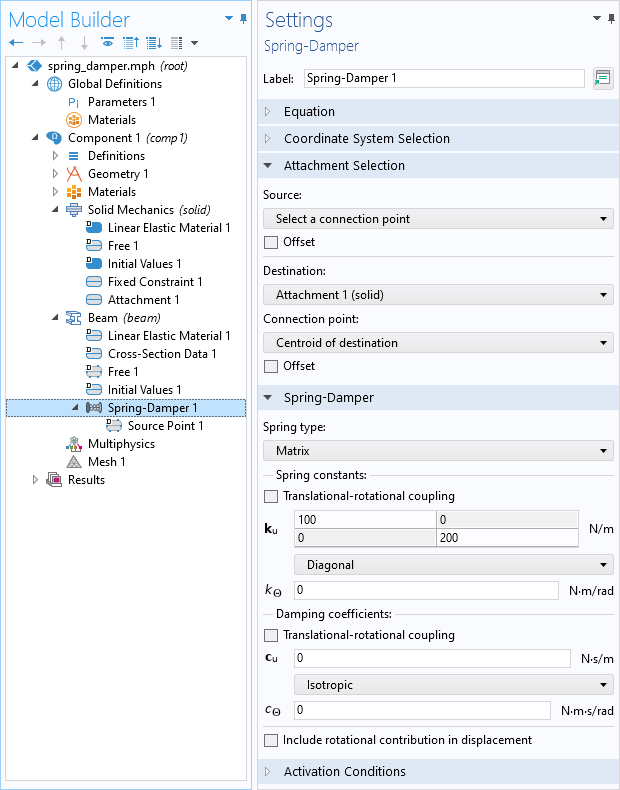
用于连接点的弹簧和阻尼器
所有结构力学接口中都添加了一个名为弹簧阻尼器 的新特征,以使用弹簧和/或阻尼器连接两个点。这些点可以是几何上的点,也可以是抽象的点,例如,通过使用连接件或者直接与刚体连接。弹簧可以是物理的,沿两点之间的线施加一个力,也可以通过完整的矩阵进行描述,连接两个点上的所有平动和旋转自由度。此外,该特征还可以连接两个不同物理场接口中的点之间的弹簧。
刚性连接件的功能改进
新版本对刚性连接件 特征进行了多项改进。在壳 和梁 接口中,选择选项已扩展到顶层,分别为边界和边。当旋转中心由点选择定义时,该点不再必须是物理场接口本身的一部分。您可以将来自不同物理场接口的刚性连接件进行耦合,从而定义一种新的虚拟刚性对象类型(此选择位于刚性连接件设置的高级 栏中)。在固体力学、壳 和梁 接口中,您可以基于 NASTRAN® 格式的导入文件中的 RBE2 单元自动生成刚性连接件。这可以通过这些接口设置中名为自动建模 的栏进行控制。为了模拟所导入文件中的连接,刚性连接件可以来自多个物理场接口。
已知滑动速度的摩擦
在某些应用中,摩擦力的方向是已知的,这是因为两个物体以给定的相对速度彼此相对滑动。在这种情况下,不需要求解摩擦力,因此可以显著加快求解速度。作为接触 节点下的子节点新增的滑移速度 特征可用于上述情况,其输入类似于摩擦 节点的输入。您可以在新的盘式刹车片磨损模型中查看这一新特征的应用演示。
用于指定旋转坐标系速度的新选项
此版本在固体力学 和多体动力学 接口的旋转坐标系 节点中添加了新的刚体 选项。通过此选项,您可以输入一个绕旋转轴的瞬态扭矩,然后通过对刚体运动方程进行积分来计算旋转速度。
接触的功能改进
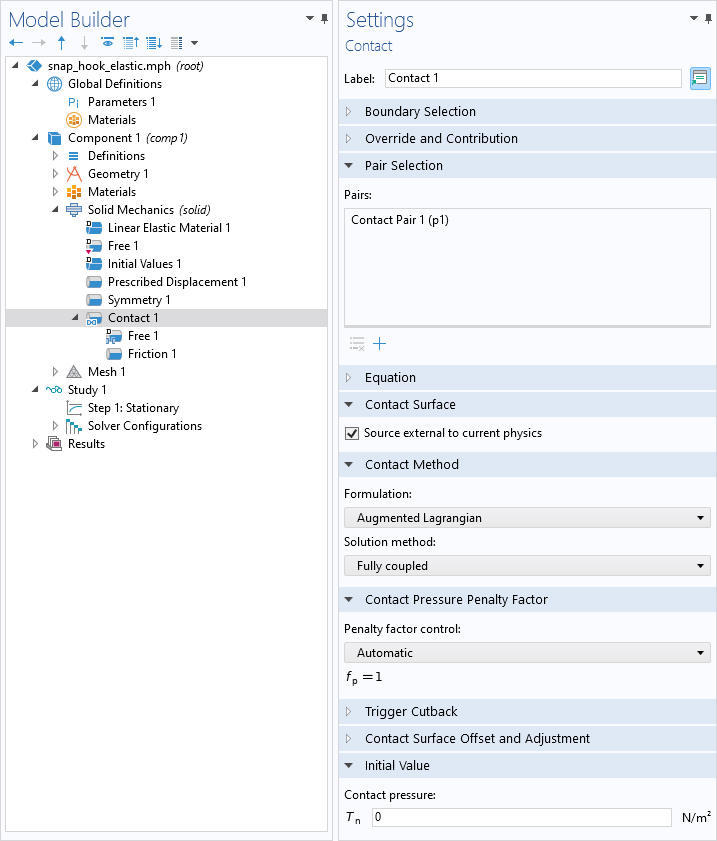
除了新的动态接触和磨损功能以外,新版本还对接触力学领域进行了其他一些改进。您可以将全耦合求解器与增广拉格朗日接触算法一起使用,从而更轻松地设置求解器序列,并提高某些问题的稳定性和收敛性。除此之外,您还可以在接触 下的摩擦 子节点中选择用户定义 作为摩擦 模型,以直接输入引起任何其他变量滑动的切向力的表达式。最后,针对罚函数法和增广拉格朗日法,提出了多种提供罚因子的新方法。
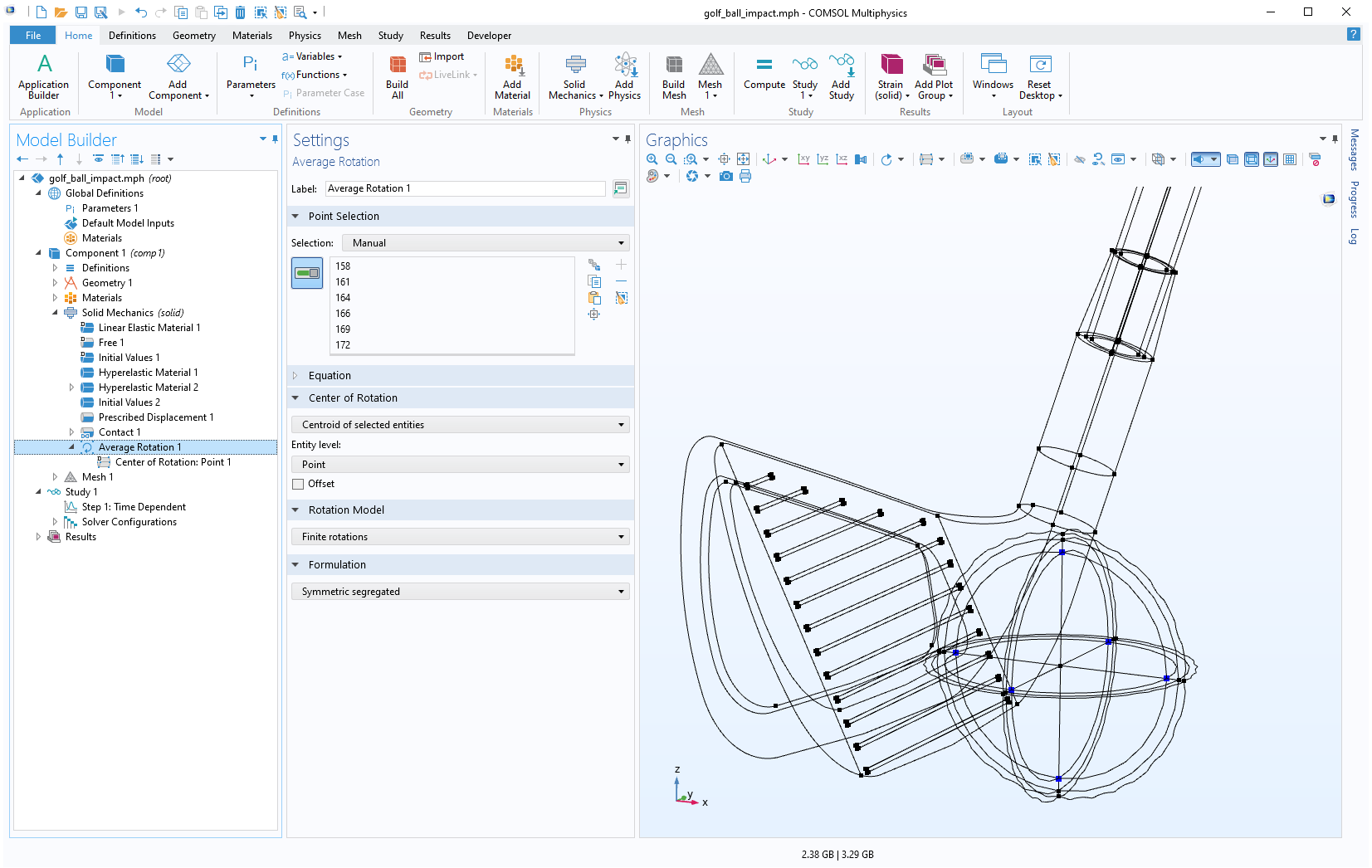
根据位移计算旋转
在以位移为自由度的物理场接口中,有时需要研究某个区域的旋转。为此,您可以添加新的平均旋转 节点,该节点使用一组点的位移来生成表示旋转的变量。如果给定的点超过三个,则应用最小二乘法对整个点集进行刚体转动的最佳逼近。此外,还可以计算角速度和加速度。您可以在新的高尔夫球的冲击分析和更新的桁架塔的灵敏度分析教学案例中查看这一新特征的应用演示。
新的教学案例
COMSOL Multiphysics® 5.6 版本为“多体动力学模块”引入了三个新的教学案例。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
具有关节间隙的曲柄滑块机构
“案例库”标题: slider_crank_mechanism_with_clearance
变速箱中的振动和噪声建模:轴承版本
“案例库”标题:
gearbox_vibration_noise_bearing