通用 博客文章

后处理技巧 – 切片图
上个月,我的同事 Ruud 介绍了一些在 COMSOL Multiphysics 仿真结果中利用箭头图的有效方式。在本篇后处理系列博客中,我将继续介绍切片图,它是一种可视化模型不同部分物理行为的简单方法。

在操作中学习:3D 打印走进课堂
这些年来,3D 打印机的体积和成本都大幅下降,也为这项快速发展的技术带来了许多新的用途。作为对这一发展趋势的响应,越来越多的教师开始在课堂中使用 3D 打印设备,让学生们在操作中学习。
后处理技巧 – 箭头图
在最近的一篇博客中,Lexi 向我们解释了如何更好地利用线图、表面图和体图。这里我们将再介绍一下箭头图,以及如何利用它进行后处理。本篇博客将从初学者指导开始,然后通过一个很有意思的工业应用带您“去厨房看看”,该案例中,箭头图设计在帮助一家咨询公司争取咨询业务时起到了关键作用。
后处理技巧 – 表面图、体图和线图
在模型几何中对仿真结果进行可视化绘图,这是揭示器件背后物理现象的绝妙方法,有时这些物理现象会非常神奇。后处理工具就像一门语言,设计人员可以由此更全面地分析和理解他们的设计和工艺。表面图、体图和线图是后处理中最常见的三种绘图类型,可用于多种仿真。
通过平行切面生成动画
动画是呈现和可视化模拟结果的一种有效手段。在 COMSOL Multiphysics 中,对于瞬态或参数化扫描研究类型,可以利用播放器节点简单地生成动画。但是,我们能否在一个三维稳态模型中,将模型解沿着某一方向的变化生成一个动画?答案是:可以。本篇博文中,我们将学习怎样通过三个步骤将平行的切面组合起来生成一个动画。

利用基于方程的建模理解交通拥堵
我们都曾因为堵车而感到无聊和沮丧。通常,交通堵塞的出现或消失都没有明显原因。我们利用气体动力学类比法,同时使用 COMSOL Multiphysics 基于方程的建模功能模拟了交通流,希望能更好地了解为什么会出现交通堵塞。
参数化扫描、特征频率和瞬态问题的合并解
在之前的博客文章中,我们讨论了在 COMSOL Multiphysics 中求解稳态问题的合并解特征。本篇博文,我们将介绍参数化扫描、特征频率、频域和瞬态问题的合并解。此外,我们还将合并解与内置的 with 算子和 at 算子进行了对比。
采用声悬浮技术精准制药
制造药品时需要无污染的空间,因此科学家尝试了许多创新的方法来改进相关工艺。在阿贡国家实验室(Argonne National Lab),曾希望能够创建一种可以在稀薄空气中漂浮和旋转化学化合物的设备并予以实现。这种设备可以非常精确地控制所需的每种化学药品的量,并将外部杂质破坏结果的风险降到最低。 声音如何举升物体 阿贡国家实验室(Argonne)的研究人员使用多物理场仿真和试错原型制作来提升声学悬浮装置的效率。当我们需要移动对象时,声音可能不是我们通常可以采用的工具。那么,如何利用声音在实验室环境中使物体漂浮或悬浮?答案在于以正确的方式组合力即可产生提升力。 当声音振动通过空气等介质传播时,所产生的压缩是可测且真实的。通过组合声泳力、重力和阻力等压力,不仅足以提升液体药物之类的材料,而且还可以根据操作员的需要对药物进行定位、旋转和移动。 声学悬浮器的换能器之间的波所产生的压力袋会在粒子尺度上产生较大的提升力。 结晶之前旋转药滴 通过使液滴保持稳定旋转,在药物保持液态和无定形状态下,研究人员能够使其进行化学反应。这是创造一个安全、稳定的环境使药物正确合成的关键所在。 声学悬浮装置的几何建模 声学悬浮装置中的每种材料和尺寸都会影响该设备,包括是否按照最终设计进行正常工作,以及是否能根据使用它的科学家的需求进行精细调整。 该设备的几何形状包括两个小型压电传感器,它们像喇叭一样竖立在产生药物的工作区域的上方和下方,如下图所示。 声学悬浮器的波型由位于平坦相对的换能器上的高斯形状泡沫控制。 设计中最重要的部分可能是由聚苯乙烯制成,并覆盖每个换能器端部的高斯形状的泡沫,这种泡沫可以消除所需范围之外的声波,能作为滤波器来维持均匀、明确的驻波。 Argonne的团队耦合使用了COMSOL Multiphysics® 中的“声学模块”、“ CFD模块”和“粒子追踪模块”对声学悬浮器进行了建模。通过仿真,他们能够缩小声场的形状和浮动液滴的位置。 上图仿真结果显示,在T = 0.75秒时,颗粒形成了液滴。左侧显示了仿真中预期的粒子分布,右侧显示了液滴的实际分布的照片。 使用声学悬浮装置生产更安全、更精确的药物 声悬浮技术的发展以及能控制越来越精细的化学反应的能力,使药物科学界的成员扩展了其研究领域,未来也许会发现更多能够挽救生命的新药。 扩展阅读 了解有关通过声悬浮技术实现飘浮更多信息。

如何在 COMSOL Multiphysics 中合并解
在工程分析中,经常需要比较在不同工况下获得的解。可能包括比较不同载荷或参数配置的影响,以及在域的每个点上对解进行包络以找到最差或最佳的情况。对于上述每一种情况以及其他类似情况,我们都需要访问多个数据集。

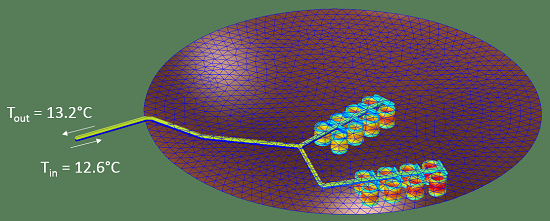
电气设备的对流冷却仿真
在集群计算的帮助下,我们与 BLOCK transformoren 一起对电感器件的对流冷却进行了建模,以获得最佳性能。

使用 COMSOL 理解稳定性方法
在这里,我们提供了一个质量传输示例模型,以帮助描述稳定方法对您的数值模型的影响。
如何在不知道积分限的情况下对函数进行积分?
您知道 COMSOL® 软件可以解决积分和偏微分方程吗?学习如何积分函数——即使不知道积分的极限。