最新内容
使用仿真评估蒸汽重整器的性能
2018年 1月 5日
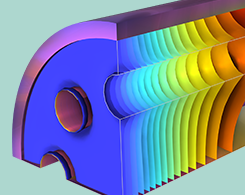
为了设计用于制氢的蒸汽转化器,需要将质量、能量和流量方程结合起来。COMSOL® 中的化学反应工程模块可以解释这个真正的多物理场问题。
模拟落在水面上的球体
2018年 1月 4日
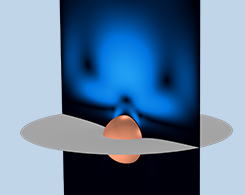
把比水轻的球丢入装有水的小烧杯中后,当球在水面上漂浮时,如何模拟水面的形状和球体的运动?本文我们演示了如何在 COMSOL Multiphysics® 软件中对该系统进行建模。
计算液体和气体的热力学属性
2017年 12月 26日
“化学反应工程模块”提供了内置的热力学属性数据库,方便用户创建传递和反应模型。阅读全文了解更多信息。
用建模推进钒氧化还原液流电池研发
2017年 12月 21日
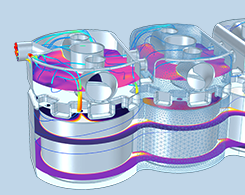
身处一间充满不同颜色液体烧杯的实验室里,虽然会看起来有点卡通,但这其实是一间研究钒氧化还原液流电池(vanadium redox flow batteries,VRFB)的实验室。与传统电池不同,VRFB 中的化学能包含在液体电解质中,液体电解质储存在外储槽中,并通过电池泵传送,从而将能量转换成电能或从电能转换而来。通过优化 VRFB 设计,工程师可以提高电网储能和可再生能源的可靠性。
COMSOL Multiphysics® 中基于方程建模的3个示例
2017年 12月 20日
COMSOL Multiphysics® 软件提供了基于方程的建模功能,该功能带来的可能性包括但不限于:创建可以保存和共享的新物理场接口,修改模型的基础方程,以及模拟更多类型的设备和过程。
如何基于高程数据创建几何并模拟不规则形状
2017年 12月 19日
本文是系列博客:如何在 COMSOL Multiphysics® 软件中模拟不规则形状的第二部分。今天我们重点介绍如何基于文本、图像或数字高程模型(DEM)文件等以各种格式存储的高程数据,创建不规则形状的表面。这种方法最适合高度(或高程)是 x 和 y 坐标函数的数据。

主题演讲视频:COMSOL Server™ 助力产品开发
2017年 12月 18日
阅读材料科学领域的工程师谈论仿真 App 和COMSOL Server™ 应用如何助力加速与优化企业的产品开发进程。
如何模拟水气球中的流-固耦合作用
2017年 12月 15日
它们不仅仅用于在后院玩游戏:水气球也是非线性弹性材料中流固耦合的一个例子。 了解如何对这种效果进行建模…