
当骑自行车时,为什么踏板不会松动并能保持踩踏状态?这是因为左踏板轴的螺纹是左旋的,而右踏板轴的螺纹是右旋的。轴承扭矩可以使踏板松开,而踏板仍能保持踩踏状态是因为受到一个更强的作用 —— 机械进动 效应影响。在本篇博文中,我们将解释什么是机械进动,并在涉及接触分析和多体动力学的自行车模型中演示这种效应。
自行车踏板的安装方式
无论您是一名自行车骑行新手,还是自走路以来就是一名狂热的自行车爱好者,您可能已经注意到自行车踏板的安装方式有些奇怪:自行车的左踏板的螺纹是左旋的,右踏板的螺纹是右旋的。

这种安装惯例启发了许多人。但他们更想知道为什么在骑行一段时间后,踏板仍在自行车两侧按照各自的螺纹方向运行而不掉落。
如果你曾经自己修理过自行车,那么能否回答一个问题:我们应该以哪种方式旋转每个踏板才能松开它?
什么是机械进动?
每当螺栓受到围绕螺栓轴线旋转的力时,就会发生机械进动。旋转力将使螺栓以与动力相反的方向旋转。下面的动画演示了这一基本原理。
螺栓(内圈)承受逆时针旋转的力(黑色箭头),这个力会使螺栓沿顺时针旋转(灰色箭头)。
这个简化的二维动画假定一个刚性螺栓的螺纹公差为 10%,而这会使螺栓在力的每一圈旋转中旋转 36°。实际的公差要小得多,因为螺栓是有弹性的,并且平面外维度上的力变化较大。
我们可以尝试模拟一种简单的机械进动技巧:将一支笔松松地握在手里,同时用另一只手将笔尖转一圈,你会发现笔将在旋转的反方向上扭曲。
使用多体动力学对自行车踏板进行接触分析
机械进动的基本原理可以通过仅对螺栓、螺栓上的力以及安装螺栓的曲柄进行建模来演示。这样的动画会在转动框架中发生,并且很难验证所施加动力的正确性。
相反,我们可以建立一个考虑整个自行车的多体动力学模型。如果考虑仅螺栓轴是弹性的,则多体动力学模型增加了可忽略的计算成本,并且它能使固定框架中的动力可视化。
当自行车用夹式踩踏时,踏板上既有向下的力又有向上的力。如下图所示,一个完整自行车的仿真模型将显示,踏板每次旋转时力会在半圆内移动两次。
该动画显示了当从车架右侧看时,自行车的踩踏板如何使右踏板轴的顺时针旋转。螺栓末端的旋转颜色以对数刻度表示接触压力。
摩擦对于接触分析至关重要,因此该模型假定摩擦系数为 0.1。
该模型还假设螺纹公差可忽略不计,并考虑了螺栓轴的实际刚度。由于机械进动,力的实际值会导致很小的旋转,因此出于可视化目的,峰值力为 50kN,比实际值大 50~500 倍。在上述动画中查看螺栓变形时,这一点很明显。如下图所示,即使作用力很大,踏板每次旋转时进动也仅约 1°。
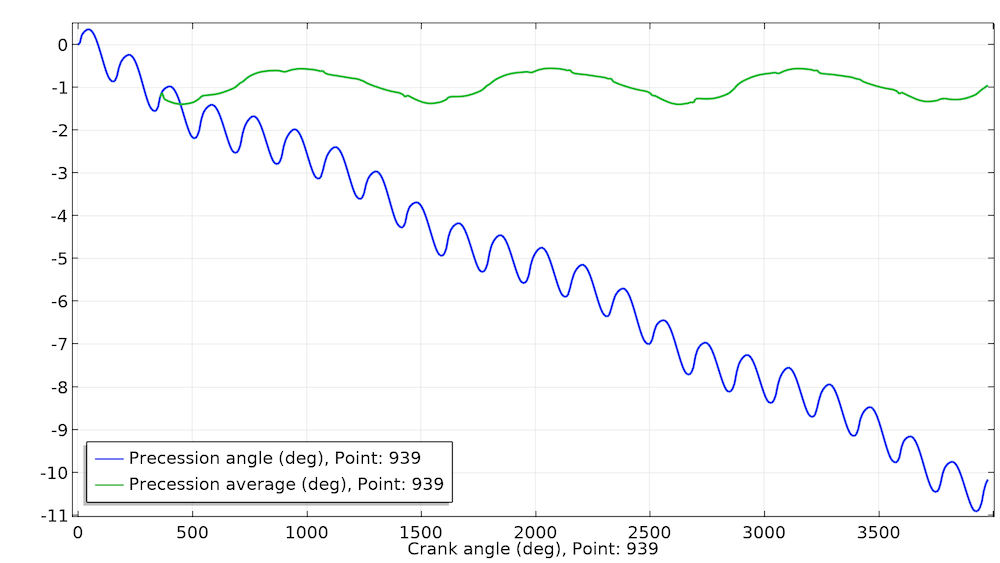
曲线图中螺栓的角度以蓝色显示,而该角度相对于前一转的值以绿色显示。绿色曲线的波动是由于数值噪声引起的。绿色曲线的平均值为 0.95°。
如果需要拧开自行车踏板,怎么做?
如果我们需要拧开踏板,请记住以下三种准则:
- 短语“右紧左松”仅适用于右侧
- 轴承力可将螺栓拧松,因此可以用扳手夹紧螺栓,然后用它“踩踏”自行车前进
- 机械进动将螺栓拧入,因此可以切换到固定齿轮设置,并向后长时间踩自行车(不推荐)
自己尝试
本文介绍的模型使用了 COMSOL Multiphysics® 5.5 版本的新增功能 —— 多体动力学 接口建模,该接口支持计算不同帧中的变形,简化了不同帧中动画的创建。
如果您想尝试自己进行自行车踏板多体动力学研究和接触分析,请单击下面的按钮获取案例模型。(请注意,您需要使用有效的软件许可证登录到 COMSOL Access 帐户才能下载 MPH 文件。)
评论 (0)