
搅拌器或搅拌反应器中的叶轮平稳搅动时,液体表面会产生波动。如果此波动的高度远小于容器中流体的高度,那么可以在一个专门的求解步骤中根据速度场显式地计算出自由液面的形状和高度。最新版 COMSOL Multiphysics 的“搅拌器模块”中包含了一个“稳态自由表面”特征,专门用于这类计算量不大的运算。
计算自由表面的形状:各种不同算法
可以有多种方法来计算与气体接触的自由液体表面形状。举例来说,自由表面发生很大程度的变形,并引起拓扑变化的情况(即波浪破碎或者液滴脱离表面),可以通过水平集和相场方法有效地预测自由表面的形状。这两种方法适用于瞬态仿真和稳态仿真。
采用水平集方法仿真的填充封闭场的过程。仿真过程产生了新的边,图中清晰地显示了所引起的拓扑变化。
现在我们来看另一种情况:自由表面变形程度很大,但没有发生拓扑变化。任意拉格朗日–欧拉(arbitrary Lagrangian-Eulerian,简称 ALE)移动网格方法能够精确地预测此类自由表面的形状,这种方法同样适用于瞬态仿真和稳态仿真,是“搅拌器模块”中用于计算自由表面形状的默认方法。
采用 ALE 方法模拟气泡上升。气泡在外半径处即将分裂时停止仿真,因为分裂会生成新的边,引起拓扑变化。
如果计算时选择了合适的网格解析度,那么水平集、相场和 ALE 移动网格这几种方法都可以非常准确地预测自由表面的形状。不过,要获得这种精确度,计算量会很大。而且,这只是预测了自由表面的形状,当这些方法还要用于之后的其他运算时,计算量之大令人难以想象。
在最新的 COMSOL Multiphysics 5.2 版本中,“搅拌器模块”使用了一种计算量相对较少的方法来计算稳态流动中自由流体的表面形状。这一方法适用于自由表面变形程度较小的情形,比如,表面只有波纹。这时会用到一个方程,其中使用速度场和压力场作为输入,通过求解表面平均高程来预测自由表面的形状(见方程 (1))。

左图:近似稳态冻结转子中自由表面模型的仿真结果。右图:全瞬态仿真中自由表面模型的结果。
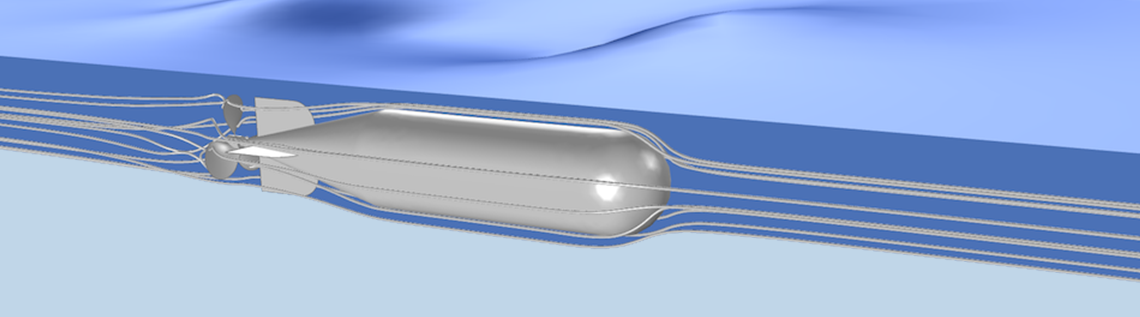
搅拌器 App 展示了这一新特征。请注意,对于涉及旋转机械的稳态流体流动问题,通常都可以利用这一方法计算自由表面形状。下图展示了一个相关应用。
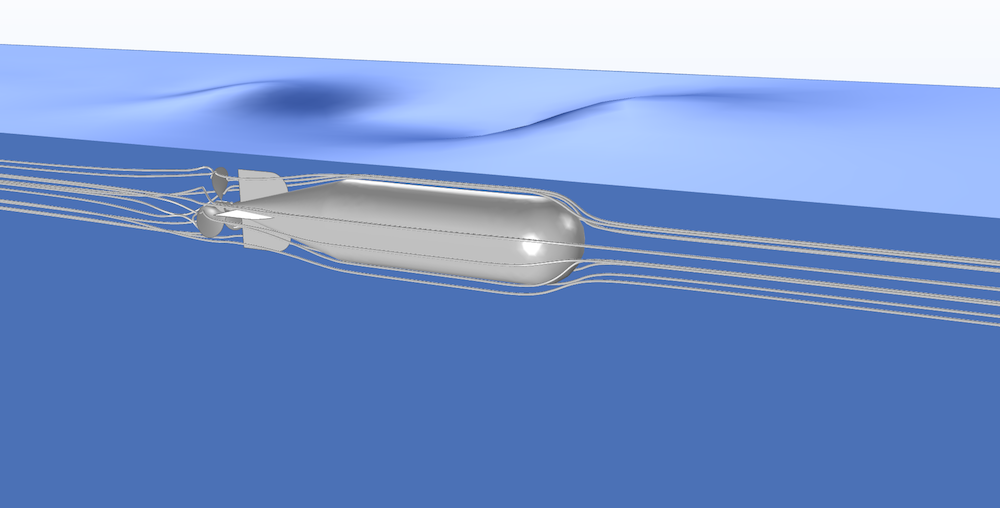
二战中使用的鱼雷仿真模型。鱼雷行进时接近水面,使水面产生波动。
接下来,我们将进一步探讨稳态自由表面计算背后的物理原理及稳态自由表面这个特征本身。
稳态自由表面计算背后的原理
要计算自由表面的变形情况,根据 Navier-Stokes 方程求出流场的解,得到边界上的压力分布 p 即可。计算流场时,我们在边界上施加了一个滑移条件以及一个恒压 {p_{ext}}。以下方程计算线性自由表面条件下的自由表面变形 {\eta }:
(1)
其中 {\mathbf{n}} 表示面法向,{{\mathbf{x}} = {{\mathbf{x}}_0}} 表示表面无波动的位置。方程右侧,表面张力系数 \sigma 乘以线性表面曲率。此方程给出了自由表面上力的近似平衡,适用于表面小型变形以及梯度较小的变形。
利用稳态自由表面特征
稳态自由表面 特征位于旋转机械,流体流动 接口,可轻松地预测由于体积力和流体流动力共同作用而产生的自由表面变形。
如下方的截图所示,使用“搅拌器模块”时,模型树中加入了“稳态自由表面”特征。选中该特征后,可以进一步启用“稳态自由表面”研究步骤。这个研究步骤的目的是,利用上一个稳态研究步骤求得的速度和压力场,求解上文提到的表面高程方程。
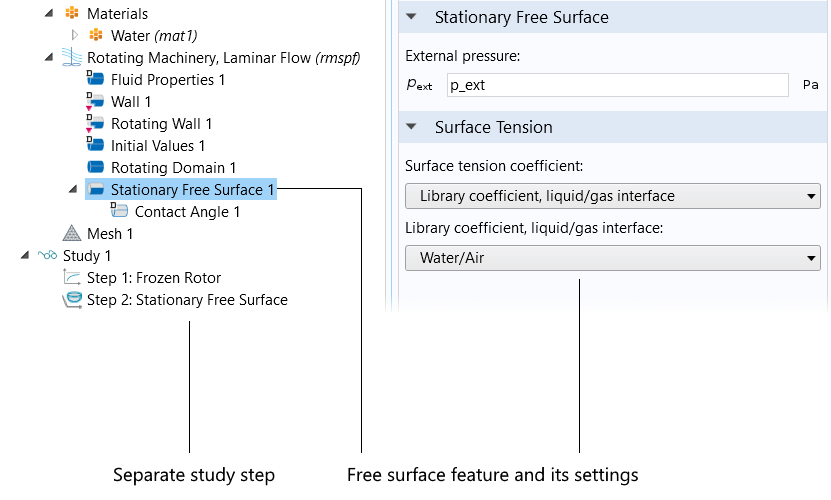
模型树中的“稳态自由表面”特征及其对应的研究步骤。
正如其名所示,“稳态自由表面”特征只适用于平稳的流动。(我们在上文提到,水平集、相场和 ALE 自由表面计算功能都可用于计算流动的瞬态仿真。)扩展“稳态自由表面”特征的一个很自然的做法是对瞬态仿真添加类似功能。
延伸阅读
- 从“App 库”下载相关教程
- 想了解最新版 COMSOL Multiphysics 中还有哪些新增功能吗?赶紧前往 5.2 版本发布亮点页面

评论 (4)
文帅 徐
2019-04-22老师您好,自由表面和稳态自由表面在层流水平集中总是显示无法应用,没办法将其用到边界,不知道是为何,其他接口都没有占用,因为要做自由流体的铺展,必须要加上边界条件,这个如何解决呢?
YiWen Hu
2022-06-25您好,我也遇到过这样的问题;通常稳态自由表面是容易添加的,自由表面则需要在模型树 的 声明(Defination)分支中,为您要添加的自由表面(通常其下已包含一个液体域,再在静态域上适合高度创建自由变化的液体域)首先声明其为 动网格,方可使用。
不知道我的解答是否对应您的情况,欢迎一起讨论!
文帅 徐
2019-04-22Dear teacher, the free surface and the steady state free surface always show that they cannot be applied in the laminar flow horizontal concentration, and there is no way to apply them to the boundary. I do not know why, other interfaces are not occupied, because to do the free flow spreading, boundary conditions must be added. How to solve this?
wei bao
2019-04-25 COMSOL 员工您可以把模型发送至COMSOL技术支持邮箱support@comsol.com,有了具体模型COMSOL工程师才能判断问题的原因。