
激光是现代科学中最有用的发明之一,但它使用起来并不容易。仅当腔镜完全对准时,激光器才能工作。即使激光发射了一段时间,它也可能突然停止。在今天的博客文章中,我们将讨论如何使用 COMSOL Multiphysics® 软件中的射线追踪功能来预测激光稳定性。
激光仿真导论
Albert Einstein(爱因斯坦)于 1916 年发现了受激发射。但这种激光大约是在 1957 年,由三位美国科学家 C.H. Townes,A.L. Schawlow 或 G. Gould 中的一个发明的。(关于谁首先发现了激光理论,有一场专利之争,而关于是谁提出这个想法也仍然有争议。)1960 年,Theodore Maiman 制造了第一台激光器。
激光在许多应用中都非常有用,例如切割、穿孔、熔化、烧蚀、无线电通信,测量和光谱学等。1960 年代,A.G. Fox,T.Li 和 H. Kogelnik 通过基于光学近轴理论的计算场分布,提出了高斯光束和预测激光稳定性的方法,在激光研究方面取得了进一步的进展。即使在六十年后的今天,这些理论仍然是处理和设计激光器的基础。
在这些理论中,Kogelnik 的激光稳定性理论对激光工程特别有用。该理论包括两个部分:
- 近轴光学理论可预测激光腔中产生的高斯光束
- 几何光学理论可预测激光束何时在腔中保持稳定
由于热透镜效应,激光打开或泵浦后可能会停止工作。激光晶体被另一个光源或多个光源泵浦会引起粒子数反转。该过程中,由于泵浦光的剩余能量产生不期望的热量,这些剩余能量不用于诱发受激发射。不期望的热量导致不期望的折射率变化,并导致晶体表面膨胀。
Kogelnik 的理论涵盖了包括柱状透镜在内的所有激光腔,通过抛物线拟合晶体中的温度分布来近似热透镜效应。
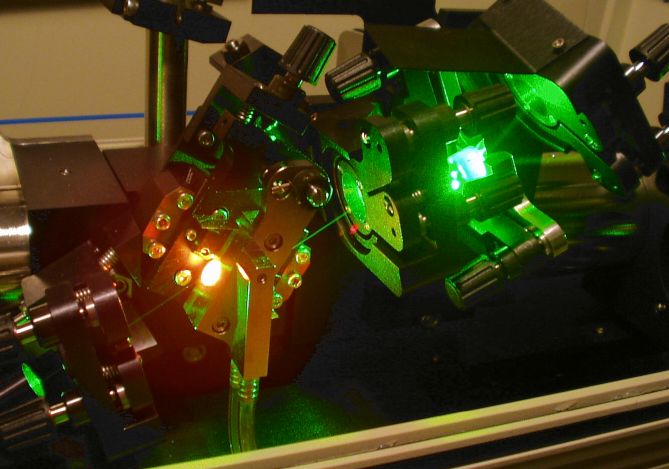
一种掺钛蓝宝石飞秒激光器。来自 Ar 激光器的绿色激光用于泵浦 Ti:蓝宝石晶体,发出橙色的眩光,以进行粒子数反转。)激光晶体是一个圆棒,但是有一个倾斜的切口,称为布鲁斯特切口(Brewster cut)。泵浦光束以布鲁斯特角(Brewster angle)进入晶体表面,以避免不期望的菲涅耳反射(Fresnel reflections)。图片来自 Hankwang 自己的作品。通过Wikimedia Commons在CC BY-SA 3.0下获得许可。
分析激光稳定性的方法
Kogelnik 理论的稳定性思想非常简单:如果经过一定数量的往返行程后,在激光腔镜之间来回反弹的光线没有从腔中逸出,则激光束是稳定的。该理论通过使用基于近轴光学而不是真实射线追踪的 ABCD 矩阵理论,更加简洁和有条理。
在这个理论中,热透镜被建模为具有一定焦距的薄透镜。通过利用抛物线拟合的激光晶体中的温度分布来计算焦距。因此,ABCD 矩阵理论和抛物线拟合方法很容易执行,并能产生理想的结果。我们只需要知道光学元件的距离、所涉及透镜的焦距以及反射镜的曲率半径即可。
所有折叠镜均由具有等效焦距的透镜代替,并且使用近似焦距表示热透镜效应,而不是给定的泵浦功率(以瓦特为单位)。光学器件不能倾斜,光学布局可以直线地展平为一维。
这种方法太简单了,因此无法处理更复杂、更实用的激光腔。如果要以3D的形式查看结果或在稳定性分析中添加棱镜,该怎么办?如果要通过折叠镜折叠激光束或倾斜其中一个光学元件怎么办?给定泵浦功率,而不是近似的焦距,该怎么办?另外,为什么不进行任何限制或近似的光线跟踪和热分析?
在不考虑热透镜效应的情况下执行激光器稳定性分析几乎是无用的,因为每个激光器都会被泵浦。因此,我们需要进行与稳定性分析相对应的热分析,它不能与射线追踪分开分析。通过在 COMSOL Multiphysics 中耦合传热 和几何光学 接口,我们可以获得所需的所有工具。
在 COMSOL Multiphysics® 中分析具有共焦腔的激光器
下面,我们来看一个简单的激光腔示例模型,并简要概述 ABCD 矩阵方法的工作原理以及它与 COMSOL Multiphysics 仿真结果的一致性。本节补充了 Kogelnik 自己的一篇研究论文的一部分(参考资料1)。在 ABCD 矩阵方法中,遵循 Hecht 表示法(参考文献2),光线可以由一个 2×1 阶列向量中的光线角度 θ 和光线位置 y 表征为
\begin{array}{c}
\theta \\
y
\end{array}
\right ]
所有的光学过程,包括传播、折射、反射、聚焦和散焦,都由称为射线传输矩阵的 2×2 矩阵表示。
例如,通过距离 L 的传播由一个 2×2 矩阵表示
\begin{array}{cc}
1 & 0 \\
L & 1
\end{array}
\right ]
在空气中一个曲率半径为 R 的镜子上的反射可以表示为
\begin{array}{cc}
-1 & -2/R \\
0 & 1
\end{array}
\right ]
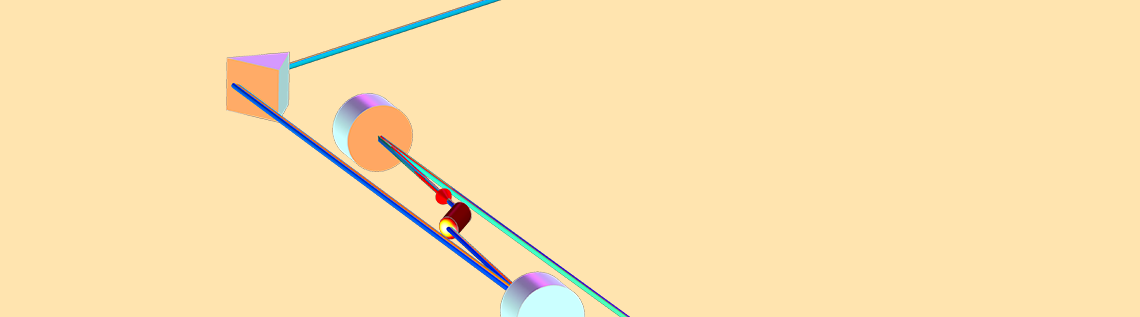
示例激光腔中具有一对相同的反射镜,其曲率半径为 R= 0.1m,腔体长度 L=R/2=0.05m。该腔体如下图所示,称为“共焦腔”。
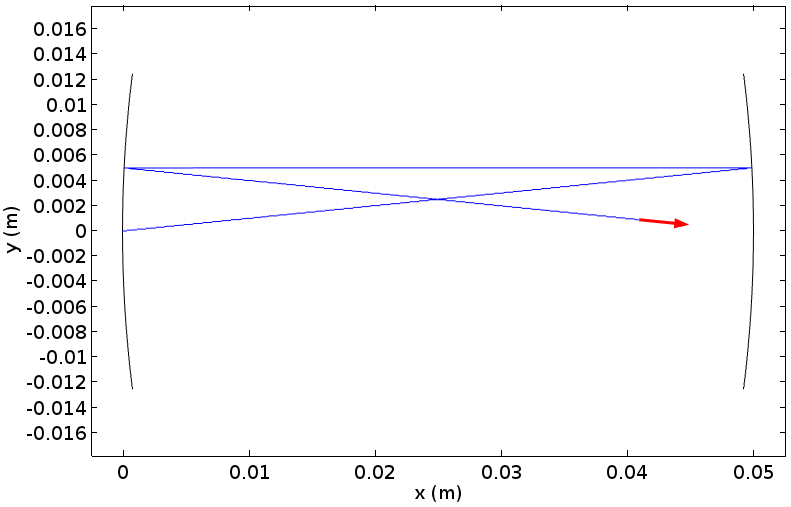
几次反弹后,在 COMSOL Multiphysics 中对共焦腔进行射线跟踪。
将 θ0= 0.1rad 和 ÿ0=0.01m 设置为初始射线角度和位置。(对于 ABCD 矩阵方法,x 的位置不重要,将初始光线设置为 x=0m,即在左镜的中心。)由 ABCD 矩阵方法可知,沿腔体长度传播的射线位置和下一个角可以由下式计算
\begin{array}{c}
\theta_1 \\
y_1
\end{array}
\right ]
=
\left [
\begin{array}{cc}
1 & 0 \\
0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0
\end{array}
\right ]
=
\left [
\begin{array}{c}
0.1 \\
0.005
\end{array}
\right ].
这是右反射镜上的光线角度和位置(在反射之前)。反射后,下一个射线角度和位置仍在右反射镜上,但朝向左。它们可以由下式计算
\begin{array}{c}
\theta_2 \\
y_2
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & +20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ].
然后,沿腔体长度的另一次传播使光线返回到原来的左镜,可由下式计算
\begin{array}{c}
\theta_3 \\
y_3
\end{array}
\right ]
=
\left [
\begin{array}{cc}
1 & 0 \\
-0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ].
最后,经左镜反射后的一次往返的结束,由下式计算
\begin{array}{c}
\theta_4 \\
y_4
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & -20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0 \\
0.005
\end{array}
\right ]
=
\left [
\begin{array}{c}
-0.1 \\
0.005
\end{array}
\right ],
该值可以在上图中得到确认。
这种方法的优点在于,我们仅需进行矩阵运算来了解射线的行为。我们可以计算出一个矩阵 M,它表示射线的传播和反射序列为
\left [
\begin{array}{cc}
-1 & -20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
1 & 0 \\
-0.05 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
-1 & +20 \\
0 & 1 \\
\end{array}
\right ]
\left [
\begin{array}{cc}
1 & 0 \\
0.05 & 1 \\
\end{array}
\right ]
=
\left [
\begin{array}{cc}
-1 & -20 \\
0.05 & 0 \\
\end{array}
\right ],
其结果与先前的结果相同:
\begin{array}{c}
\theta_4 \\
y_4
\end{array}
\right ] =
\left [
\begin{array}{cc}
-1 & -20 \\
0.05 & 0 \\
\end{array}
\right ]
\left [
\begin{array}{c}
0.1 \\
0
\end{array}
\right ]
=
\left [
\begin{array}{c}
-0.1 \\
0.005
\end{array}
\right ].
该传递矩阵 M 具有 M3=I 的性质。即,经过三个往返之后,它变成单位矩阵。实际上,这可以通过 Sylvester’s theorem (西尔维斯特惯性定理)进行分析证明,而无需计算矩阵乘积:
\begin{array}{cc}
A & B \\
C & D \\
\end{array}
\right ]^n
=
\frac{1}{\sin \Theta}
\left [
\begin{array}{cc}
A \sin n\Theta – \sin(n-1)\Theta & B \sin n\Theta \\
C \sin n\Theta & D \sin n\Theta – \sin(n-1) \Theta
\end{array}
\right ],
其中,\cos \Theta = (A+D)/2。
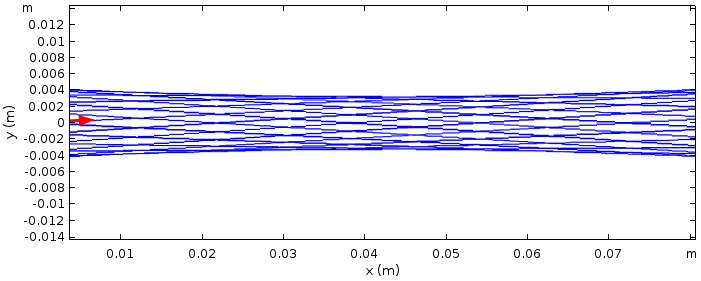
将 ñ=3 代入上面的公式中的 M 矩阵中,得到 M3=I。我们可以通过下图中的射线追踪来确认这一点,其中光线路径是由往返次数着色的。
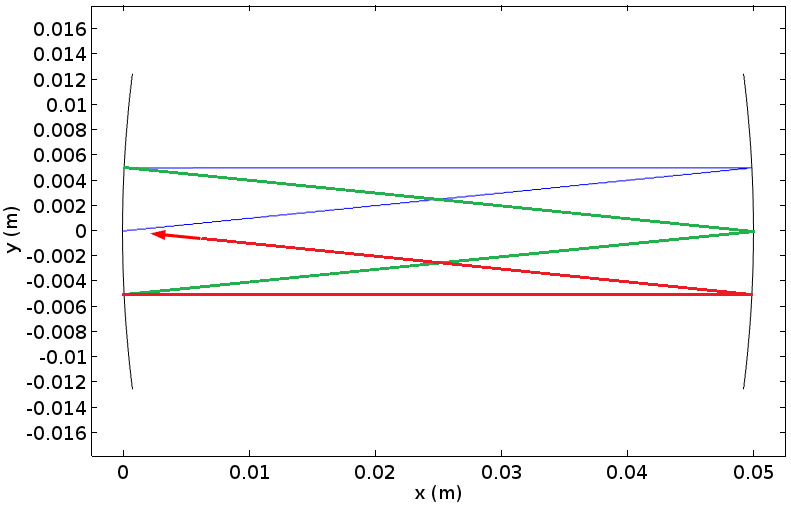
与前一个图相同的共焦腔的射线追踪结果表明,光线在往返 3 次后返回到了初始位置。
在这种情况下,可以说该腔体是稳定的,这意味着该腔体内部的射线不会从中逸出。上面的公式可以得出这样一个普遍的结果:当矩阵的迹为 -1 \le (A+D)/2 \le 1 时,由矩阵表示的序列是稳定的。
在本示例中,矩阵的迹被计算为 (A+D)/2 = -1/2。因此,它是稳定的。
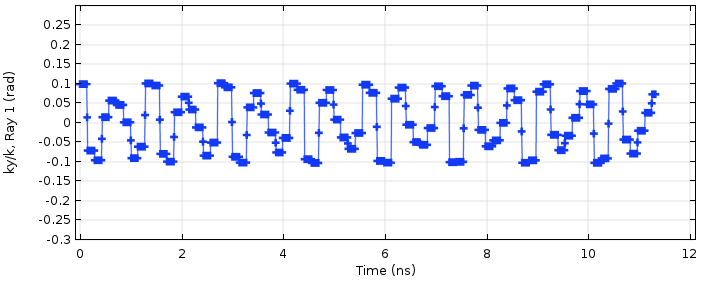
如下图所示,还可以通过绘制单位波矢量的 y 分量来查看结果。该图显示,射线方向会定期改变,但不会增长,并且在 3 次往返之后会返回相同的值。大体上,±0.15rad 是射线进入腔体内的上下边界,下图证明了这种情况。
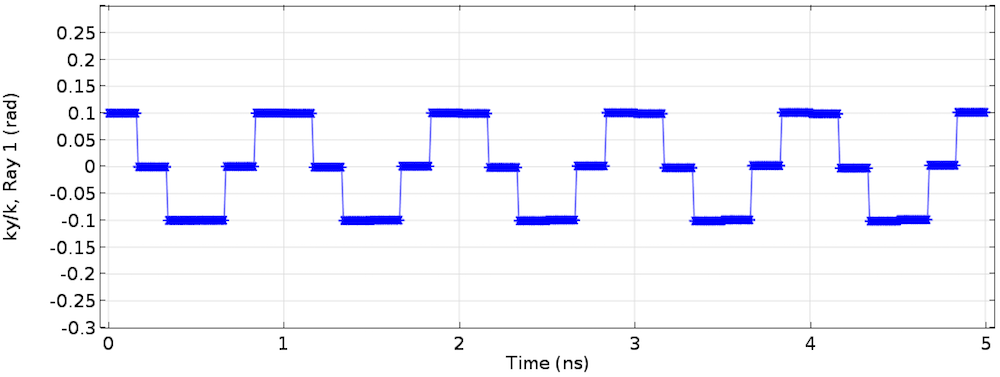
单位波矢量的 y 分量。射线的方向以有限的最小和最大值为边界,这意味着射线不会偏离到腔镜之外。
更改激光器的腔体长度
下面我们来讨论另一个例子。选择腔体长度为 L=R\left(1-\sqrt{1+\cos(9 \pi/10)/2}\right)=0.084357 m。该腔体距离共焦腔有点远。这种有意调整的空腔长度可确保 \sin(20\Theta)=0 和 \sin(19\Theta)=-\sin(\Theta) 。因此,在经过 20 次往返之后,传递矩阵变成了单位矩阵,并且获得了初始射线角度和位置。这时,传输矩阵为
\begin{array}{cc}
-1.215 & -6.2574 \\
0.026393 & -0.68713 \\
\end{array}
\right ]
该传输矩阵的 20 次乘积为 M20=I。我们可以通过下图中的射线追踪来确认这一点。红色箭头确实指向原镜的中心并指向原方向。
经 20 次往返之后,具有相同反射镜且腔体长度稍长的激光腔的射线追踪结果。
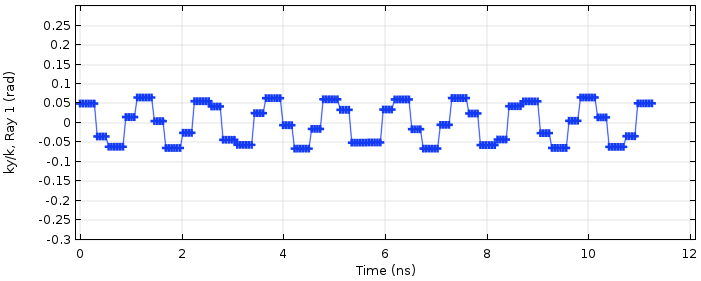
单位波矢量的 y 分量。
通常,曲率半径为 R1 的右反射镜,半径为 R2 的左反射镜和一个行程的腔长 L 的传输矩阵可写为
\begin{array}{cc}
\left( -1+\frac{2L}{R_1} \right) \left( -1+\frac{2L}{R_2} \right) – \frac{2L}{R_2}
&
\frac{2}{R_1} \! \! \left( -1+\frac{2L}{R_2} \right) – \frac{2}{R_2}
\\
\left( -1+\frac{2L}{R_1} \right)(-L)+L
&
-\frac{2L}{R_1}+1
\\
\end{array}
\right ].
经过一些简单的运算,由矩阵的迹得出的稳定条件表示为
{L}{R_1} \right)\left (1-\frac{L} {R_2} \right) \le 1.
该稳定性公式可进一步扩展到在腔中包含透镜的情况。在腔体内引入透镜会使传递矩阵变得复杂,在这里不再写出,但是稳定性标准仍然很简单。添加焦距为 f 的镜头,将稳定条件修改为
\right) \le 1,
其中,L0=L1+L2–L1 L2/f,L1 和 L2 分别是从镜头到左、右镜的距离。在前一个腔中添加一个焦距为 f= 50mm 的聚焦透镜,其稳定性标准数为 0.10978,这可以预测该腔是稳定的。
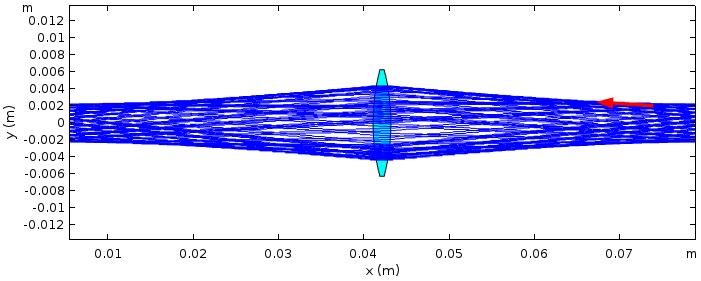
在之前的腔中添加了薄透镜的射线追踪结果。
单位波矢量的 y 分量。
到目前为止,我们已经通过 ABCD 方法与 COMSOL Multiphysics 中的射线追踪功能研究了一些基本的激光腔稳定性分析。两种方法的稳定性结果吻合良好。
模拟焦距变化的激光器
现在,我们来看最后一个示例。在本示例中,对上一个示例中的焦距进行了参数化和更改,并在著名的稳定性图表中绘制了腔稳定性的变化。在 Kogelnik 的理论中,通过使用由 g1= 1 –L2/f–L0/R1 和 g2= 1 –L1/f–L0/R2 定义的一组新变量,将之前的稳定性条件公式改写为
在下面著名的稳定性图中,以 g1 和 g2 分别作为水平轴和垂直轴,将稳定区域绘制为阴影线区域。如果由原腔体参数 R1,R2 和 L0 导出的 g1 和 g2 在阴影区域内,则根据Kogelnik的理论,激光腔是稳定的。对于前面的示例,我们为两个反射镜设置了相同的曲率半径。因此 R1=R2,因此 L1=L2=L0/2 对称,这导致 g1=g2。这在稳定性图中表示为一个 45 度线。当腔体参数改变时,g1 和 g2 的值沿通过第一象限和第三象限的线改变。
接下来,我们来看看它是如何可视化的。将镜的曲率固定为 0.1m,腔长固定为0.084357 m,同时将透镜的焦距从 15mm 更改为 40mm(以 5mm 为增量)。下图显示了 Kogelnik 对带有透镜的特定激光腔的理论结果。对于f=25、30、35 和 40mm,激光是稳定的,g1g2 分别为 0.67091,0.43100,0.29200 和 0.20545。
这些值被绘制在阴影区域,而焦距为 15 和 20mm 会使该激光器不稳定,因为它们的 g1 g2 值超过 1.0,分别为 1.1299 和 2.1593。下图绘制了该激光腔的理论预测值。图的侧面为每个焦距的光线追踪结果,显示出与理论的完美匹配。在 COMSOL 计算中,一旦光线离开腔体,内置停止条件就会终止计算。实际计算时间 T 与预设计算时间 T0(在这种情况下为 50ns)之比,T/T0 表示腔稳定性,如果 Ť0 选择适当。除 1.0 以外的任何稳定性指数值可能都无济于事,因为我们知道,当激光不稳定时,它会很快关闭。换句话说,激光稳定性的变化几乎是数字化的,即 1(打开)或 0(关闭)。

比较 Kogelnik 的稳定性理论和 COMSOL Multiphysics 带有薄透镜的共焦腔的射线追踪结果。
最后一个示例显示在考虑热透镜效应的情况下,射线追踪可以进行激光腔稳定性分析,因为该示例是 Kogelnik 的热透镜激光腔模型。按照 Kogelnik 的理论,由泵浦激光加热的激光晶体被具有一定焦距的薄透镜所代替。一旦知道了晶体内部的温度分布,就可以通过 n=n0+(T–T0)dn/dT 求出一阶近似值,其中 n,n0 是有泵浦和无泵浦的折射率分布,Ť,T0 是有和没有泵浦时的温度分布;dN/dT 是随温度变化的折射率变化。
如果晶体是棒状,则泵浦的激光晶体的折射率在中心附近的分布近似为抛物线形状,即 n(r=n0(1-2 2/a 2),其中 r 是极坐标系中的径向距离,其z轴沿着泵浦光轴。将计算出的折射率分布拟合到该抛物线以获得拟合参数 a。一旦该参数被计算出,即代表热透镜效应的焦距可以近似表示为 f〜a2/(4n0 L),其中 L 是晶体长度(参考文献3)。热透镜效应还包括表面膨胀,这会引起折射角的变化,我们可以一种类似的方式对此进行分析。
结语
使用 COMSOL Multiphysics,我们无需进行拟合。我们只需使用传热 和固体力学 接口进行热和力学模拟,以了解新的折射率分布和表面膨胀,然后简单地使用射线光学接口进行射线追踪,以了解在热透镜效应下激光腔的稳定性。在即将发表的博客文章中,我们将进一步讨论 COMSOL Multiphysics 的射线追踪功能。在即将发表的这篇博客中,我们将会看到一个完整的对 Ti:蓝宝石激光腔的分析模型,该模型带有双泵浦布鲁斯特切口晶体和一对色散补偿棱镜。敬请关注!
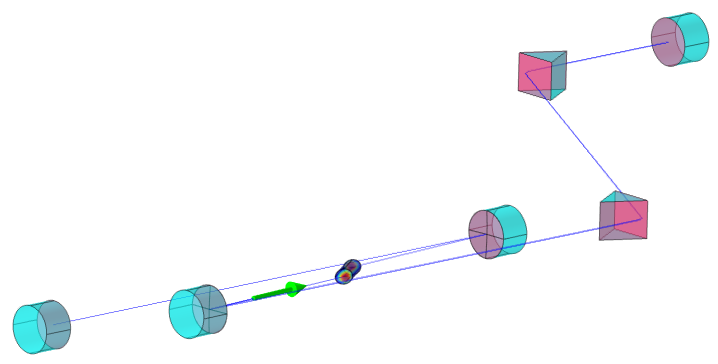
Ti:蓝宝石激光腔的稳定性分析模型,用于求解温度、力学位移以及射线位置和角度。
参考文献
- H. Kogelnik and T. Li, Applied Optics, Vol. 5, No. 10 (1966)
- E. Hecht, Optics, Addison Wesley
- W. Koechner, Solid-State Laser Engineering, Springer
其他资源
- 浏览这些激光腔教程模型:
- 在 COMSOL 博客 上了解有关激光模拟的更多信息:

评论 (4)
将 王
2024-05-25您好,有没有源程序,让学习学习,感谢
hao huang
2024-05-27 COMSOL 员工文中提到的案例模型请参考:
https://cn.comsol.com/model/laser-cavity-with-a-thin-lens-59571
https://cn.comsol.com/model/two-mirror-laser-cavity-59551
https://cn.comsol.com/model/bow-tie-laser-cavity-59771
jackson zhong
2024-09-04如何在COMSOL中求解单位波矢量的 y 分量
Min Yuan
2024-09-06 COMSOL 员工您好,射线光学有内置归一化射线方向矢量的不同分量,具体可以参考案例:https://cn.comsol.com/model/gravitational-lensing-18573