
为了表征超弹性材料,需要进行各种测试获取实验数据,包括承受单轴拉伸和压缩、双轴拉伸和压缩以及扭转测试。今天,我们向大家介绍如何使用通过单轴和双轴测试获得的拉伸和压缩测试数据,模拟由弹性泡沫材料制成的球体的压缩。通过案例模型,我们演示了如何使用可压缩的 Storakers 超弹性材料模型进行仿真计算,以及如何通过单轴和等双轴测试数据计算力-伸长率的关系。
使用测试数据进行压缩分析
下图是进行单轴和双轴拉伸和压缩测试的示意图。在这里我们不讨论进行此类测试所需的设置,而是假设已获取实验数据。
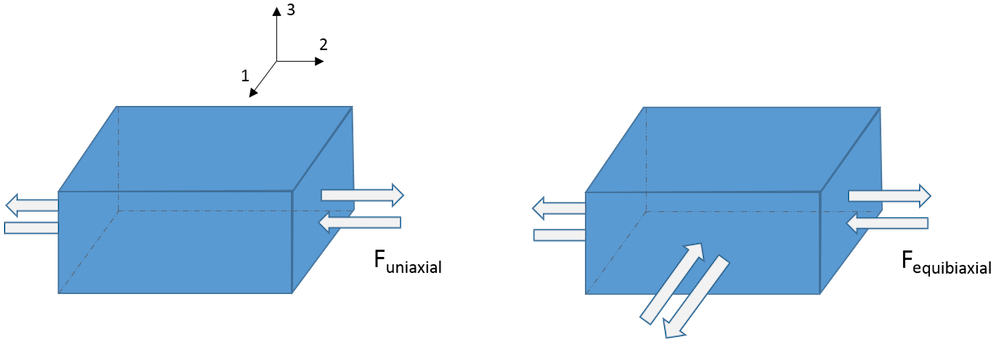
在之前关于获取材料数据用于结构力学仿真的博客文章中,我们说过要正确表征材料变形,获取单轴和等双轴测试的数据至关重要。如果仅具有单轴测试数据,那么对涉及多维应力变形状态模拟的结果将不准确。
下图是泡沫材料的单轴和双轴测量数据:力-伸长率 \left(\lambda\right)。\lambda 值大于1 代表张力数据,\lambda值小于1 代表压缩数据。
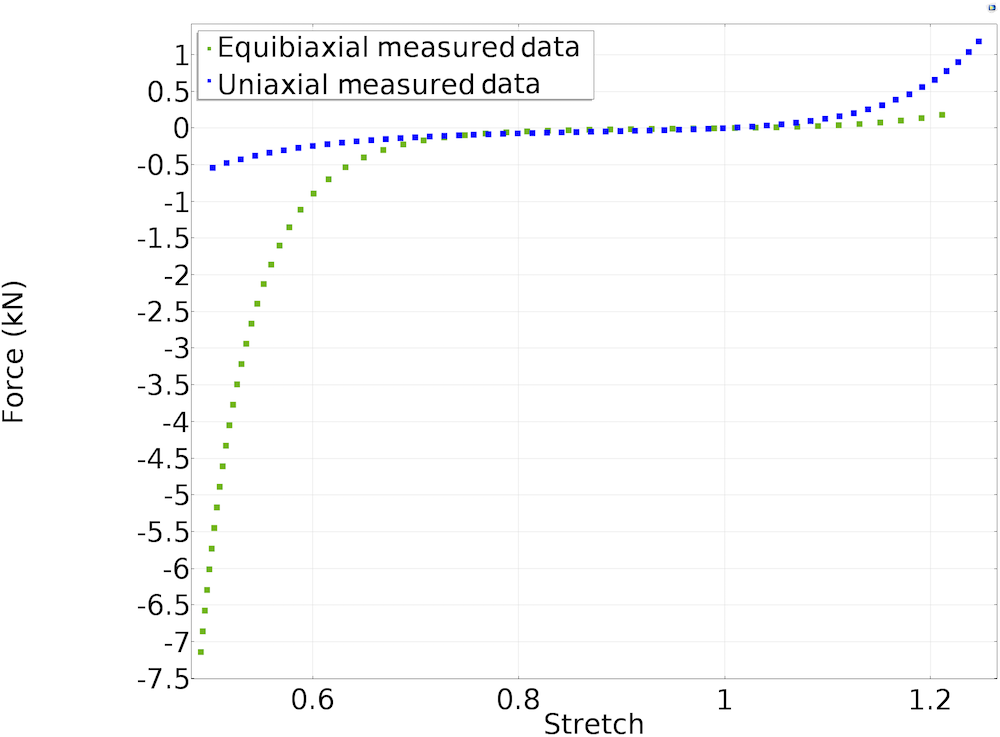
由单轴和双轴测试得到的力–伸长率数据。
Storakers 超弹性材料模型
Storakers材料模型通常用于模拟高度可压缩的泡沫材料。Storakers 材料模型的应变能密度函数为
(1)
{k=1}^{N} \frac{2\mu_k}{\alpha_k^2}\left(\lambda_1^{\alpha_k}+\lambda_2^{alpha_k}+\lambda_3^{\alpha_k}-3+\frac{1}{\beta_k}\left(J_{el}^{-\alpha_k\beta_k-1}\right)\right)
其中 \lambda_1,\lambda_2和 \lambda_3 是主伸长率;J_{el}是弹性体积比;\alpha_k,\mu_k 和 \beta_k 是 Storakers 材料参数。
在超弹性材料仿真中,需要材料参数作为输入数据。我们通过将实验测试数据与代表应力或力对伸长率的解析表达式进行拟合,来计算这些参数。在通过各种超弹性材料模型对测量数据进行拟合的博客文章中,我们已经详细讨论了此一般过程。与之前博客文章中讨论的不可压缩材料模型不同,本篇博客文章研究的是可压缩 材料的解析表达式。下面,让我们看一下 Storakers 材料模型的单轴和双轴测试中力与伸长率的关系。
单轴测试
参考上面单轴测试的示意图,假设用于材料表征的泡沫材料在主方向2 上承受单轴载荷。假设仅允许弹性变形,那么各向同性超弹性材料的单轴变形的主伸长率由下式给出:
对于单轴测试,主方向 1 和 3 上的主柯西应力由下式给出 \sigma_1 = \sigma_3 = 0。对于可压缩的各向同性超弹性材料,主柯西应力与主伸长率之间的关系由下式给出:
(2)
上述关系来自热力学第二定律和应力在主伸长率的频谱表示的影响之一。根据热力学第二定律,我们可知 S = 2\frac{\partial W_s}{\partial C},其中, S 是第二类皮奥拉-基尔霍夫应力张量,C 是弹性柯西-格林张量。频谱形式为 S = \sum_{} _{a=1}^{a=3} \frac{1}{\lambda_a}\frac{\partial W_s}{\partial \lambda_a} \bf{\hat{N}_a} \otimes \bf{\hat{N}_a},其中,\bf{\hat{N}}_a 代表主要参考方向。
已知柯西应力 \sigma = J^{-1}FSF^T,以频谱表示的变形梯度张量 F 可表示为 \sum_{} _{a=1}^{3} \lambda_a\;\bf{\hat{n}}a \otimes \bf{\hat{N}}_a(\bf{\hat{n}}_a 代表主要的空间方向),我们可以得到 \sigma = \sum{} _{a=1}^{3} J^{-1}\lambda_a\frac{\partial W_s}{\partial \lambda_a}\; \bf{\hat{n}}a \otimes \bf{\hat{n}}_a = \sum{} _{a=1}^{3} \sigma_a\; \bf{\hat{n}}_a \otimes \bf{\hat{n}}_a,其中 \sigma_a 是主柯西应力(点击此处,了解有关不同应力测量及其方向的更多信息)。将等式1 中的 W_s 代入 \sigma_1,我们得到
^N\frac{2 \mu_k} {\alpha_k^2}\left(\alpha_k\lambda_1^{\alpha_k-1}\alpha_k J ^{\alpha_k\beta_k-1}\frac{\partial J}{\partial \lambda_1}\right)
然而,众所周知 \partial J/\partial F = J F^{-\text{T}},其中 J = \text{det}(F) 和 F 是变形梯度张量。这种关系来自张量演算。当按照主伸长率重写公式时,我们可以得到 \partial J / \partial \lambda_i = J \lambda_i^{-1}。将此关系代入上式并使 \sigma_1 等于0,得到
(3)
对于每个 \beta = \beta_k,上面等式均适用。
单轴力由下式计算
(4)
其中,l_{1},l_{3} 是沿主方向的变形尺寸,l_{10}, l_{30} 是沿主方向的原始尺寸。使用等式2,3,和4,我们可以将单轴力表示为
(5)
等双轴测试
假设泡沫材料在主方向1和2上受到等双轴力,并且仅允许弹性变形。对于各向同性超弹性材料的等双轴变形,主伸长率为
对于等双轴测试,主柯西应力 \sigma_3 = 0。由等式2,我们得到
(6)
{(-2\beta)/(1+\beta)}
\;\;\;\text
{和}
\;\;\;J = \lambda^
{2/(1+\beta)}
对于每个 \beta = \beta_k,上面等式均适用。
等双轴力 F_{equibiaxial} 由下式给出
(7)
= l_
{20}l_{30}\left(\lambda_2\lambda_3\right)\sigma_1
(8)
l_
{30}
\sum_
{k=1}
^N\frac
{2\mu_k} {\alpha_k}
\left(1-\lambda^{-\alpha_k\frac
{(1+3\beta_k)}
{(1+\beta_k)}}\right)\lambda^
{\alpha_k-1}
使用优化接口计算 Storakers 材料参数
根据等式5 和8 在 N=2 时得出的解析表达式,通过 COMSOL Multiphysics® 软件中的优化 接口,对力-伸长率测试数据进行曲线拟合。下图显示了测得数据与拟合数据的对比,单轴和等双轴最小二乘拟合的权重相等。
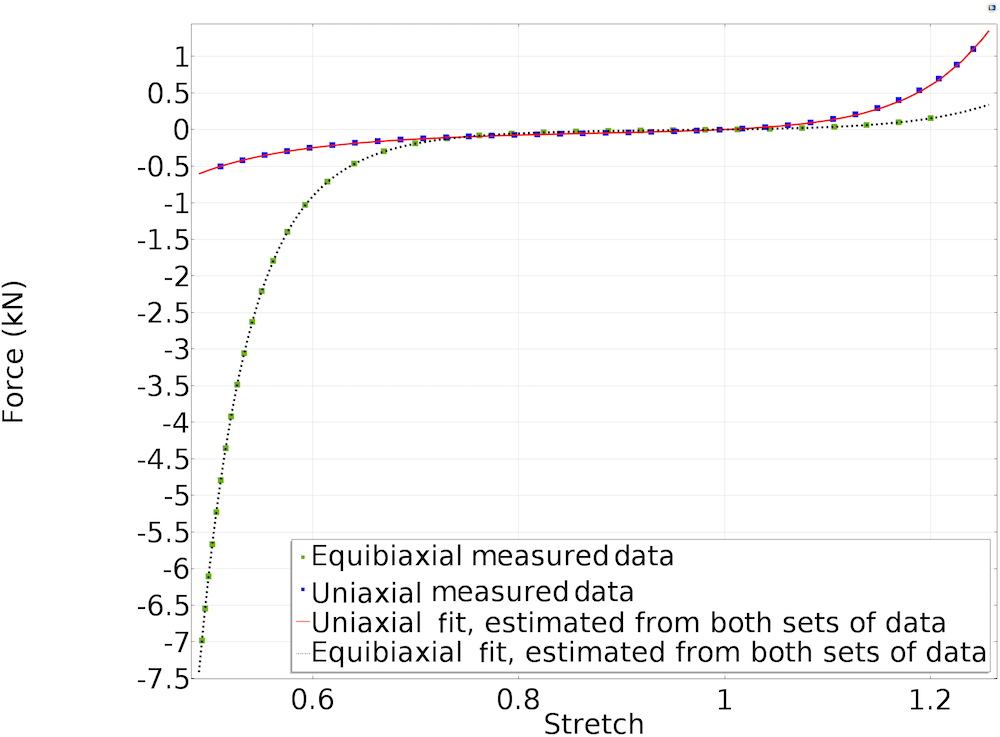
使用 Storakers 材料模型拟合材料参数。
根据以上拟合,我们计算出用于测试的泡沫材料的 Storakers 材料参数:
模拟球形泡沫材料的压缩
上文中,我们已经计算出了泡沫材料的 Storakers 材料参数值,因此可以直接在球形泡沫压缩模拟中使用这些值。下图显示了模拟的设置,其中有一个中空的球形泡沫,该球形泡沫被一个较小的球形压头压在圆柱形刚性板上。右图为描述三维问题的二维轴对称模型。
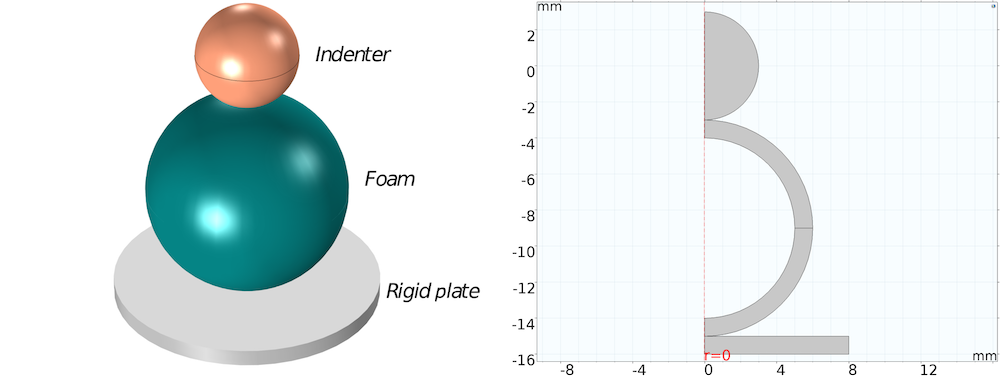
泡沫材料压缩的三维示意图(左)和 COMSOL Multiphysics 中的二维轴对称设置(右)。
下图显示了用于模拟超弹性泡沫材料模型的设置。压头和刚性板被建模为线弹性材料。
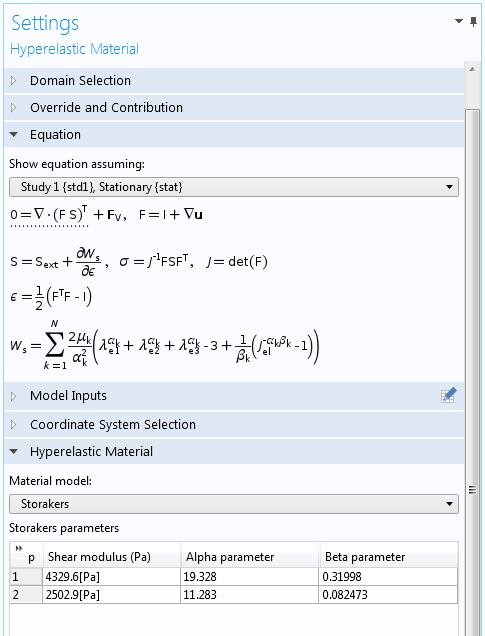
压头、泡沫和刚性板处于接触状态,因此我们在它们的边界之间定义了一个接触对。使用指定位移 条件,给压头施加11毫米的向下移动,使得泡沫内部边界与其自身接触,称为自接触。
通过定义第二个接触对 建立自接触模型,我们可以将泡沫的内部边界同时定义为源和目标。假设我们不知道内表面的哪一部分将与相同表面的哪一部分接触,将底部刚性板设置为完全固定。
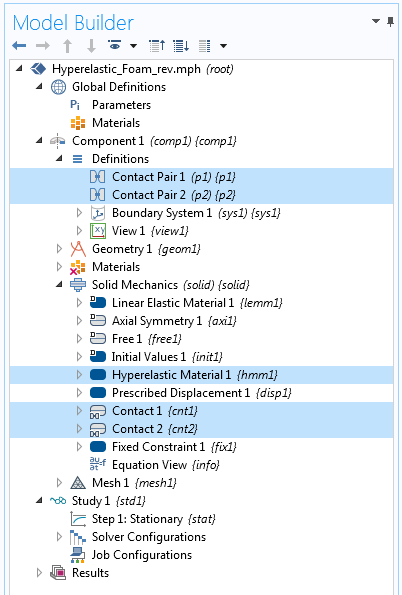
超弹性材料模型的设置。
结果与分析
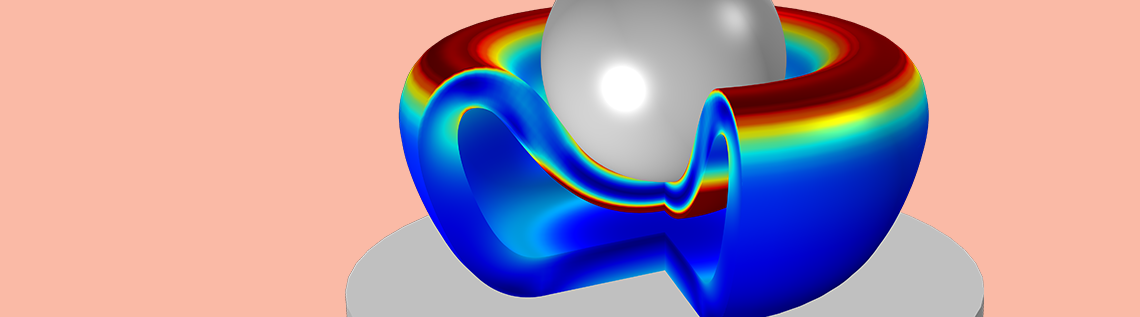
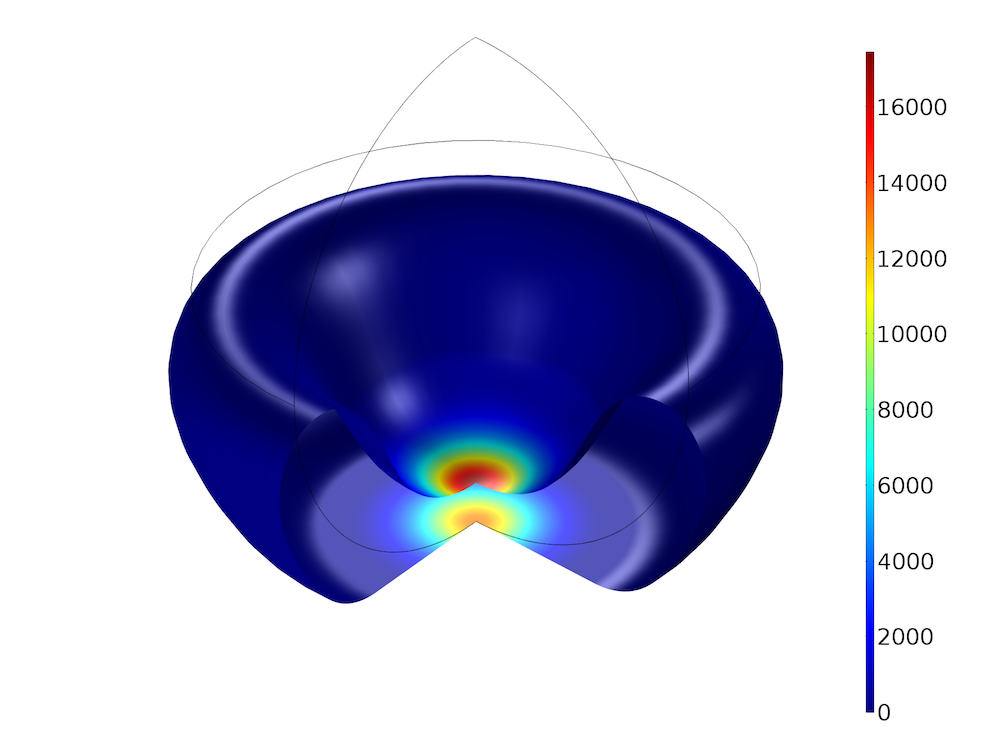
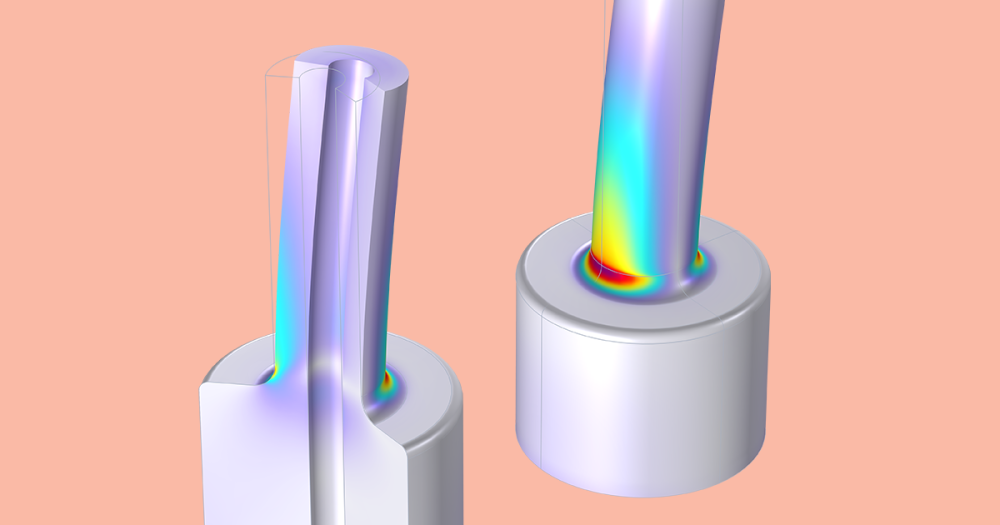
下面的三维动画显示了旋转几何体部分中的 von Mises 应力图。
通过压头压缩的球形泡沫中的 Von Mises 应力。通过动画查看应力变化,色标的最大值上限为 10kPa 。
下图显示了在模拟的最终时间点时,泡沫边界上的接触压力。
模拟的最终时间点时的接触压力图。
当然,我们不仅限于模拟球形泡沫材料。现在,我们已经知道了给定伸长率范围内的 Storakers 材料参数,可以在任何其他情况下对相同的泡沫进行建模,只要其变形与用于计算参数的测试数据一致即可。但是,我们还应该记住,尽管通过曲线拟合实验测试数据获得了材料参数,但是如果材料模型违反了Drucker 的稳定性标准,则材料模型的稳定性仍然会出现问题。
下一步
了解 COMSOL® 软件如何满足您的结构分析需求,请点击下方按钮:

评论 (5)
炯 李
2020-12-21Can you send me the raw data and model files? I want to learn from you! My email is lucklj2011@dlmu.edu.cn
hao huang
2021-12-10 COMSOL 员工You can refer to the similar case: http://cn.comsol.com/model/hyperelastic-seal-206
Ruile Xiang
2021-12-09Would you please share me the model file ? My email is ruile.xiang@ronovosurgical.com THX!
hao huang
2021-12-10 COMSOL 员工You can refer to the similar case: http://cn.comsol.com/model/hyperelastic-seal-206
Chen Zhouxiang
2022-03-23SO how to draw the last figure