
打高尔夫时,您的击球不光取决于肌肉力量,与高尔夫挥杆机理相关的其他一些因素会产生更重要的影响。我们将讨论如何通过对高尔夫挥杆的多体分析 来改进您的击球表现。
高尔夫击球,并非只取决于肌肉
高尔夫击球的结果主要取决于球杆头接触球之前的运动。鉴于这一点,我们应该能借助多体分析来改进您的高尔夫挥杆。

这里,我将向您演示如何通过多体动力学模块来模拟各个身体部位、高尔夫球杆以及二者之间的联系。
手臂-球杆(双连杆)vs 肩部-手臂-球杆(三连杆)挥杆模型
双连杆模型是模拟高尔夫挥杆的简单方式,其中手臂与球杆是由铰链连接的双连杆。在模型中,手臂会绕脖子底部的固定点旋转,球杆会相对手臂绕腕关节旋转。双连杆模型支持的击球摆杆长度不够,所以无法真实表征打高尔夫时的挥杆。
三连杆模型高尔夫挥杆中的力学更好地表征了这一运动,它将肩部作为一个独立链接包含在内。增加的链接解决了击球摆杆问题。因此,我们将在分析中使用三连杆模型。

两连杆和三连杆挥杆模型示意图。
高尔夫挥杆背后的力学
本次分析重点关注如何通过研究高尔夫挥杆力学原理来尽量提高球杆头接触球之前的速度。假定由不同身体部位(肩部、手臂及手腕)施加的扭矩曲线受限于单个部位的最大扭矩容量。如果希望打出一记好球,在所有施加的扭矩中,手腕处扭矩的作用最重要。

三连杆挥杆模型所模拟的几何。
模拟球杆的下挥杆时,整个击球可以分为两相。在第一相,手臂及球杆会作为一个刚性装配体绕固定点旋转。在这一相,手臂会与球杆重合以最小化绕旋转中心的惯性,从而能在给定的手臂-扭矩大小下得到最高的角速度。这时,手腕会弯曲至最大可能的角度,即您感觉不舒服或不利于您挥杆,手腕施加的扭矩会对抗其他两个扭矩,努力将球杆头控制在这一位置。
在第二相,手腕处的扭矩开始协助肩部和手臂处的扭矩来将球杆向前推,以便最大化球杆头的速度。手腕处扭矩角色转换的时刻是决定击球质量的一项关键参数。为了理解它对球杆头速度的影响,我们对手腕扭矩执行了参数化操作。
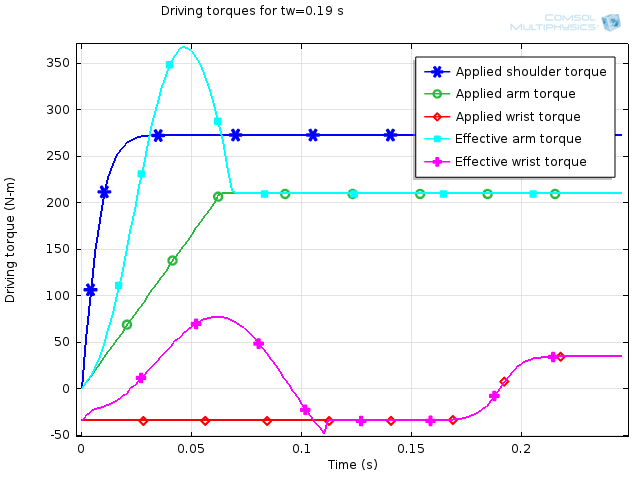
t_w = 0.19s 时,肩部、手臂及手腕所施加扭矩的时程。
施加扭矩及有效扭矩
由肩部、手臂及手腕施加的驱动扭矩有一个最大容量,并能在定义区间内变化。假定由肩部施加的扭矩会在经历较短时间的累积后,从最大正值开始。由手臂施加的扭矩主要作用在手臂上,同时会影响肩部,它将随时间呈线性累积,直到以指定速率实现最大正值。由手腕施加的扭矩主要作用在球杆上,同时会影响手臂,开始是负值,然后在给定时间 (t_w) 切换到最大正值。
手臂及腕关节处的旋转并非完全自由。它的前向及后向旋转会受到韧带、肌肉、关节形状或所有这些因素的综合影响。在我们的高尔夫挥杆分析中,后向旋转的限制更重要,而且这一限制会因人而异。
刚开始下挥杆时,由于身体各部位惯性力的关系,这些旋转会尝试突破极限值。所以,停止时的等值刚度以及阻尼将带来额外的扭矩。因此,由手臂及手腕施加的有效扭矩将大于实际的施加值。
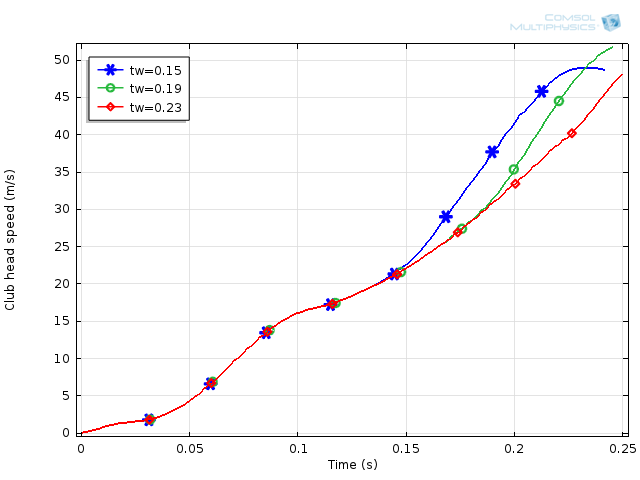
下挥杆时,高尔夫球杆头在不同手臂扭矩切换时间点 (t_w) 的速度。
我在上图中绘制了球杆头在不同手臂扭矩切换时间点 (t_w) 的速度,整个时长大约为 0.25s。从中可以观察到,球杆头在 t_w = 0.15s处的速度最高,此时还没有碰到球,造成过早释放。另一方面,球杆头在 t_w = 0.23s 时的速度没有达到最大值。
球杆头在 t_w = 0.19s 时的速度高于其他两种情况,接近给定几何参数和肌肉强度下的最优值。
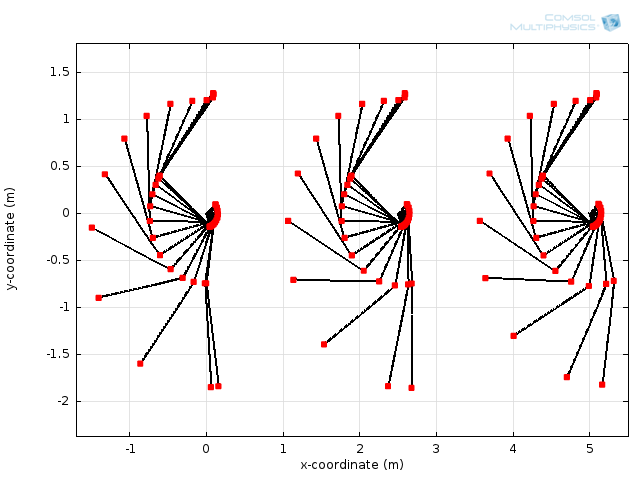
对比不同 t_w 值下高尔夫球杆头轨迹的对比(结果显示为 t_w 值的增加)。
连杆的运动及手臂关节、手腕关节和高尔夫球杆头的轨迹。
多体分析结果
手臂处的扭矩在整个挥杆过程中均保持最大值,如果同时在下杆开始时保持非常高的速度,会造成力量的提前释放,球杆头会在实际碰到球之前先达到它的最高速度。
我们还推断出,在给定的扭矩容量下,较长的摆臂及较大的手腕弯曲极限角可能会带来一定的优势。此外,手腕对力量释放的抑制程度会受到扭矩容量的限制。因此,您的高尔夫技巧也与延迟释放及滞后击球强烈相关。
我们还在模型(可供下载)中将球杆分为两部分来考察它的转轴挠度:握把和杆身。它们通过铰链相连,拥有有限的刚度和阻尼。您可以看到与其他参数相比,杆身挠度会挥杆的影响可以忽略不计。
评论 (0)