刚性与柔性部件
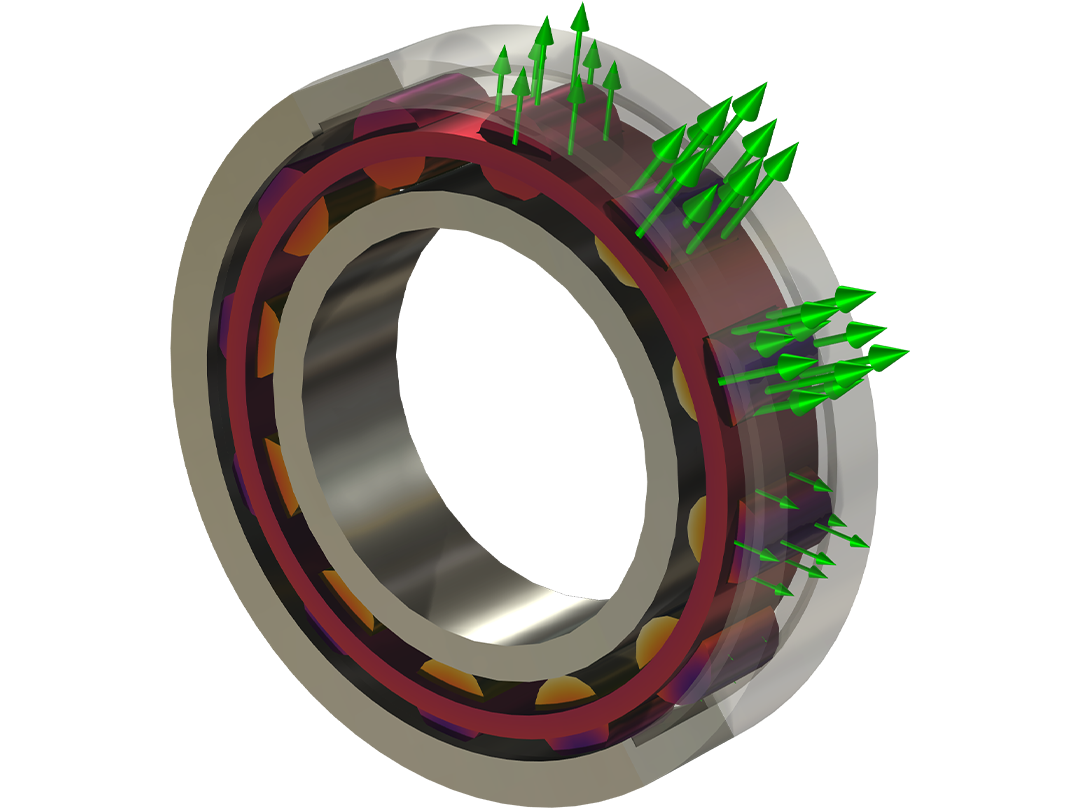
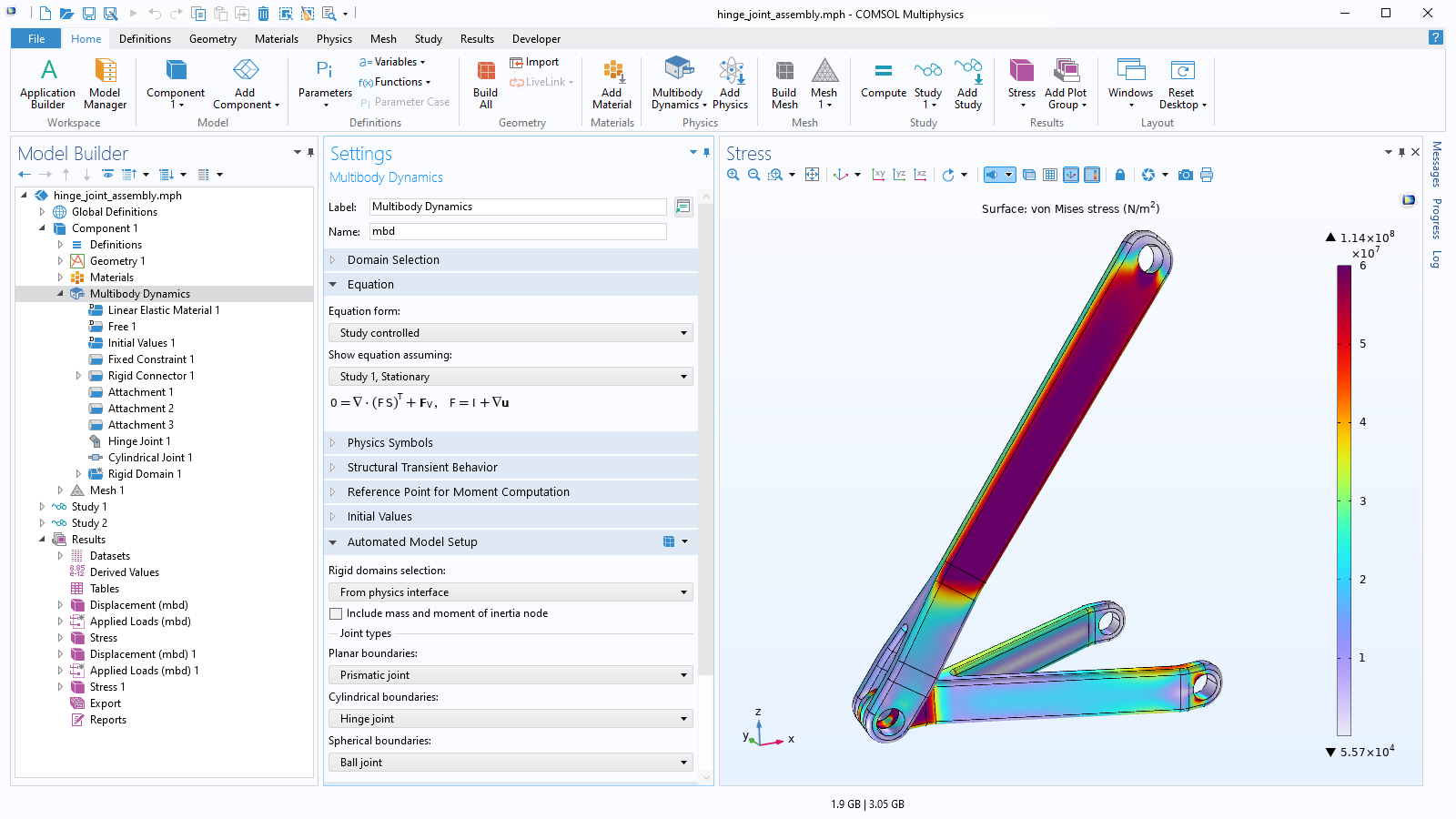
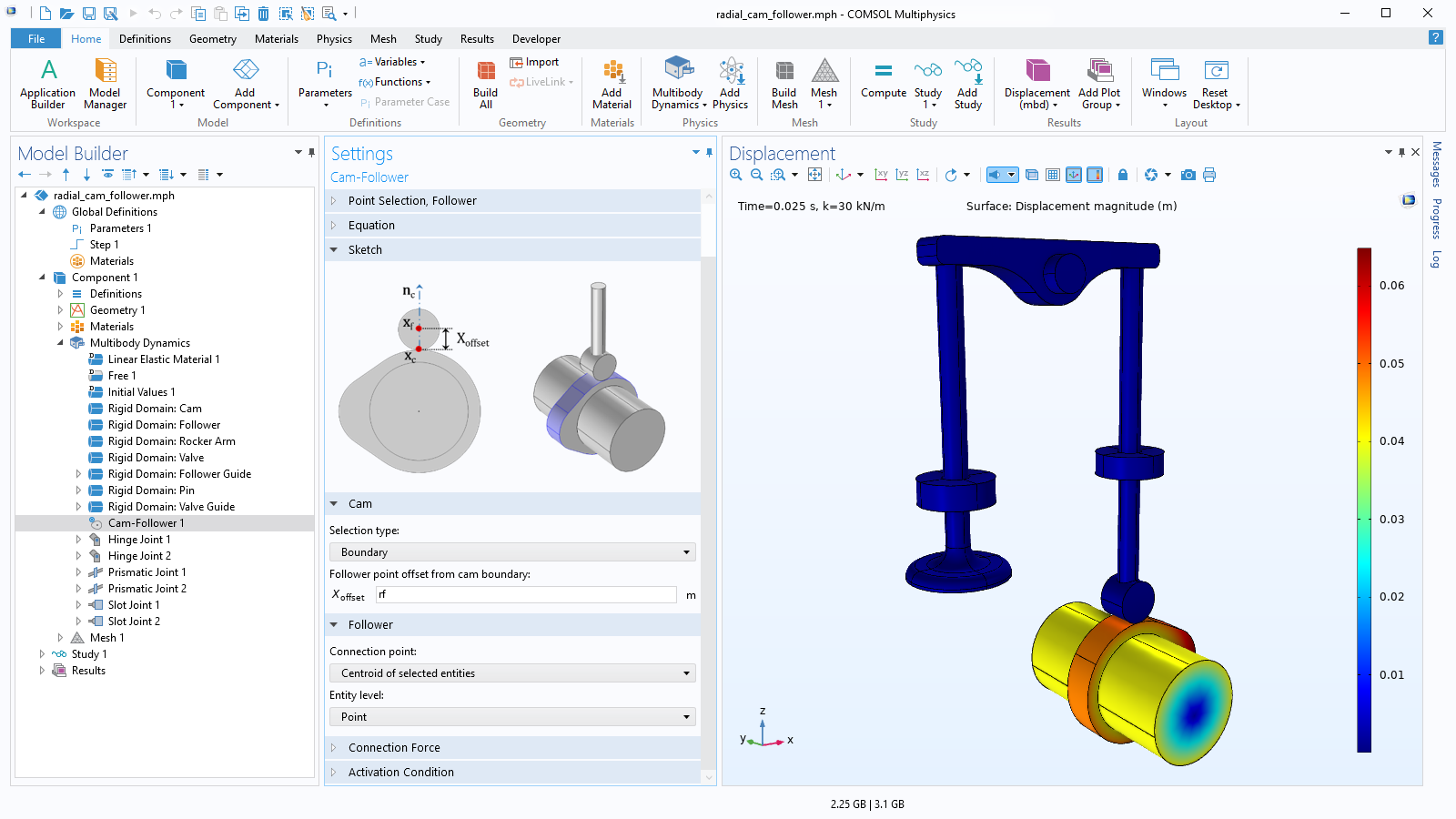
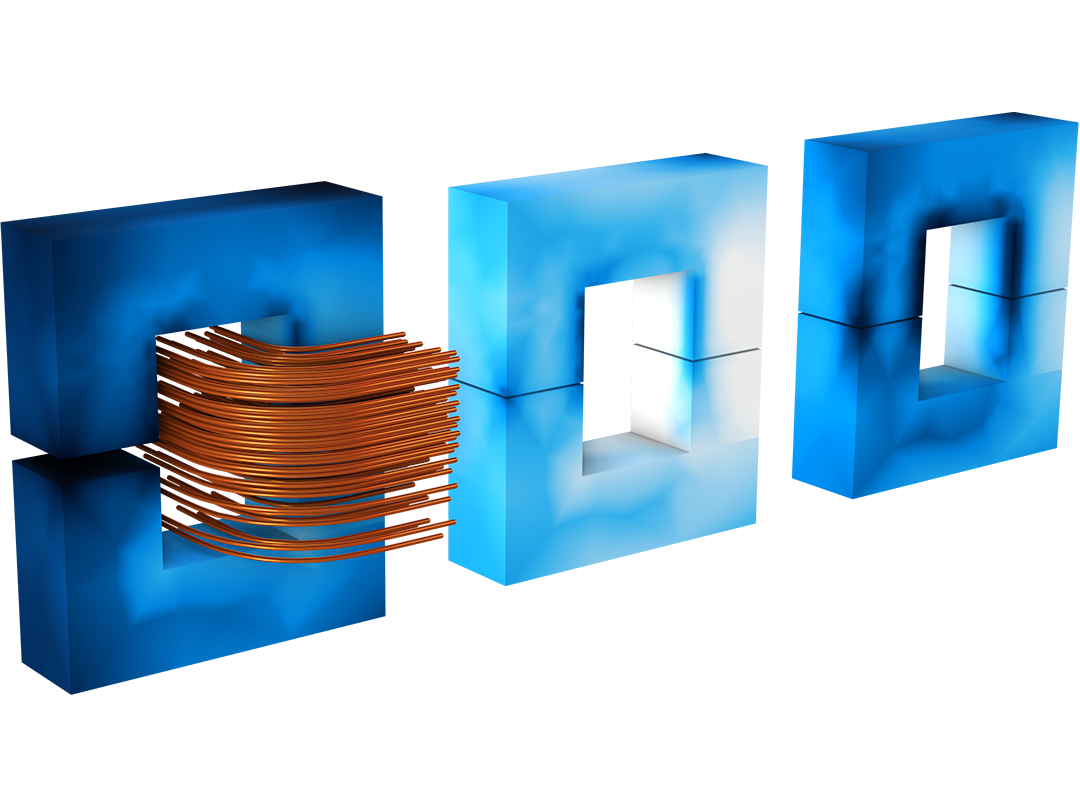
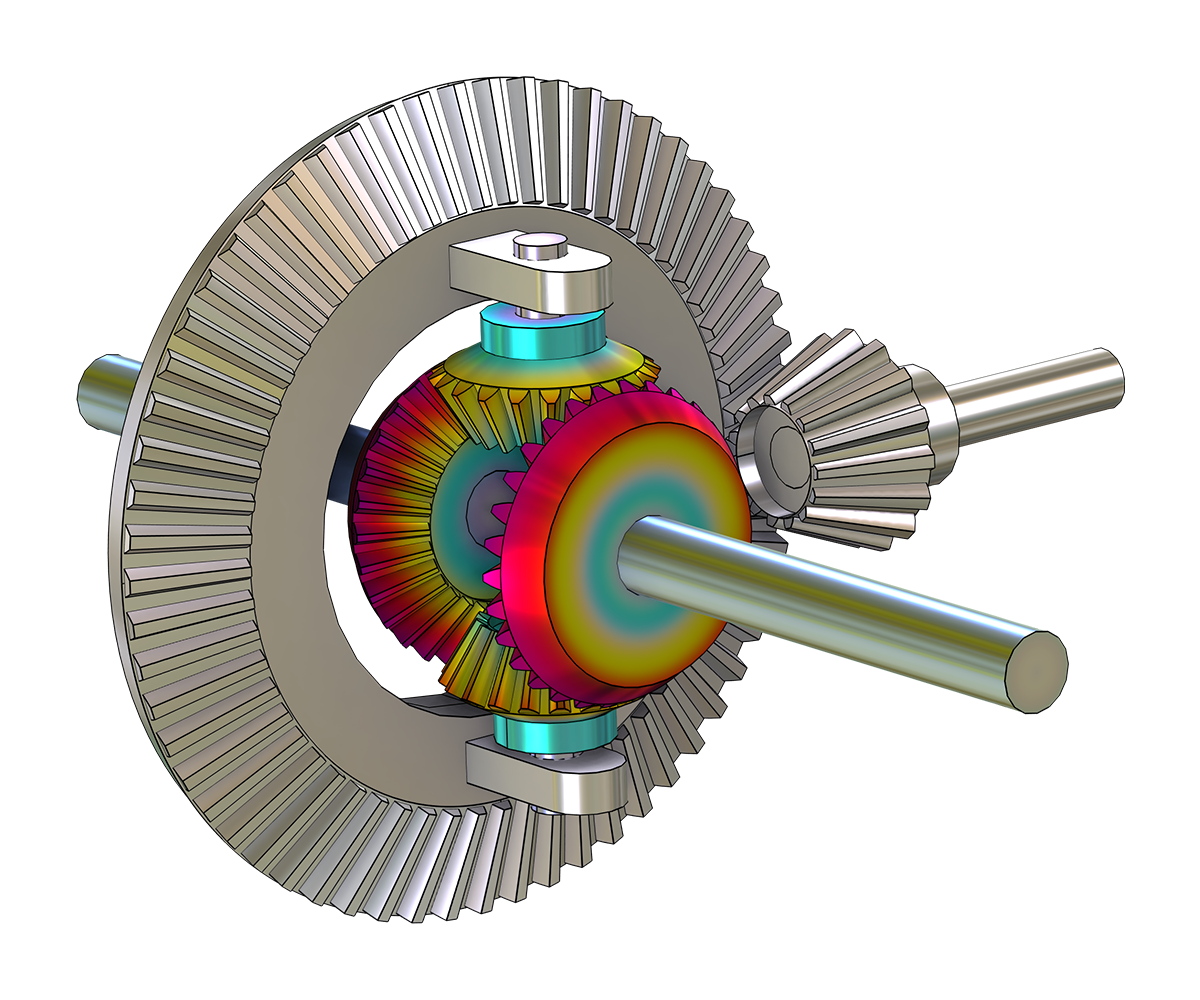
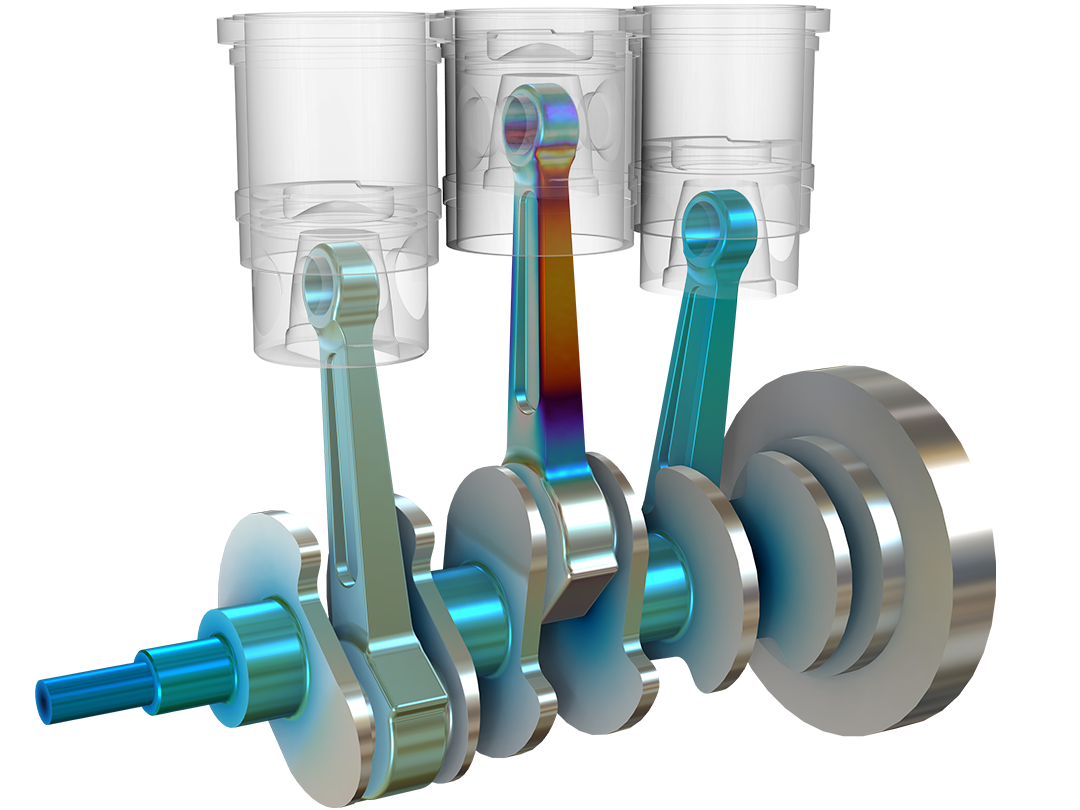
在多体系统建模中,柔体和刚体通过不同类型的关节、齿轮、凸轮、轴承、弹簧或阻尼器相互连接,并承受较大的位移和旋转。“多体动力学模块”的一大优势在于能够方便地将刚性与柔性部件进行混合建模。
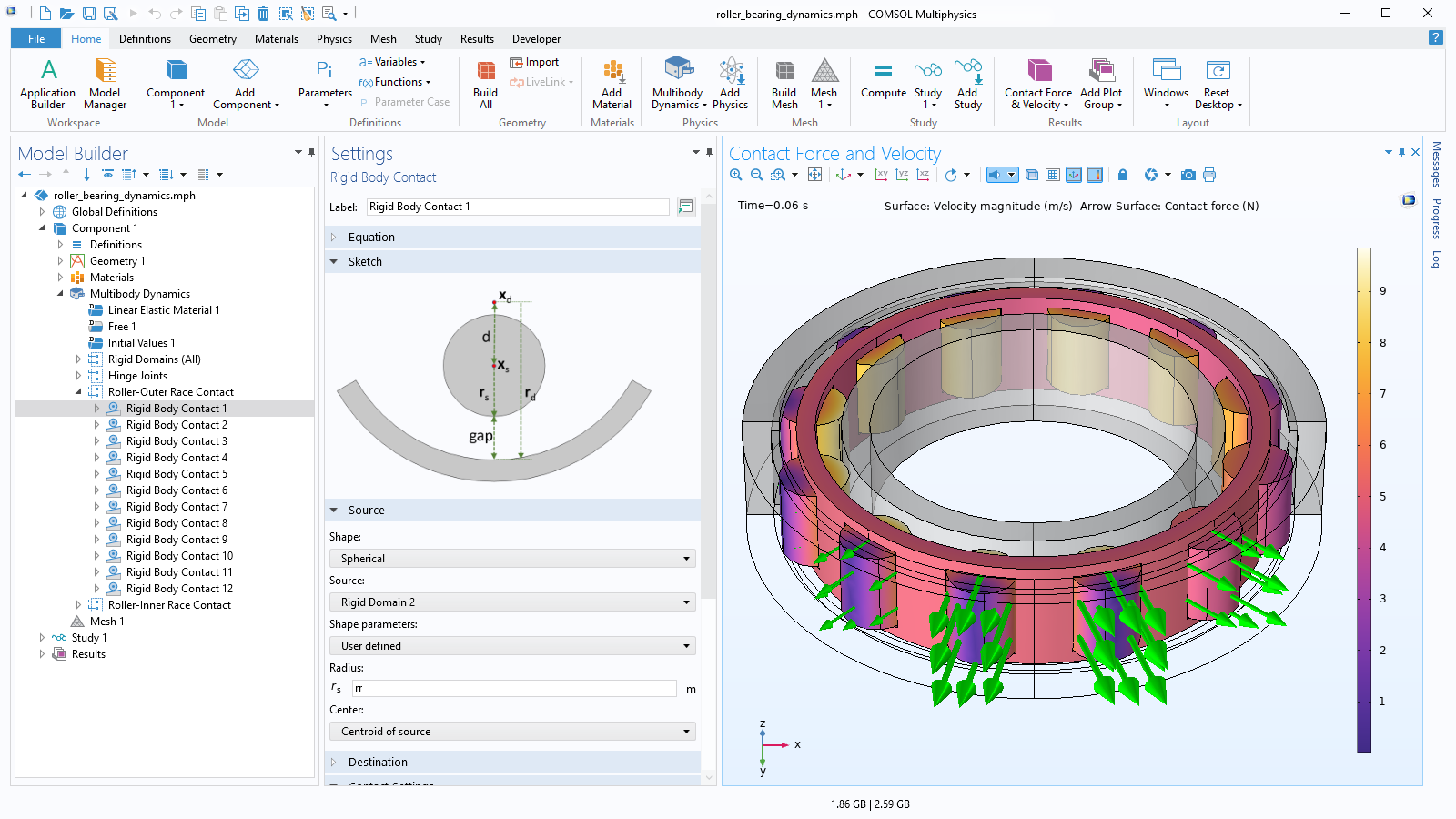
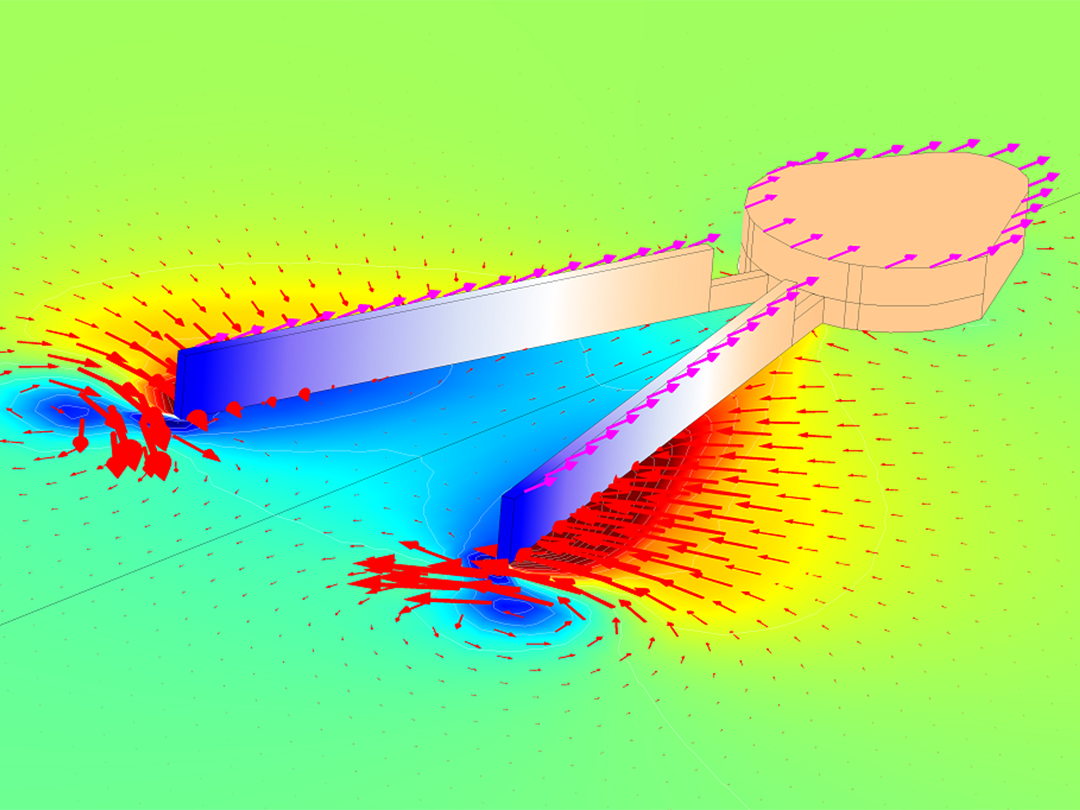
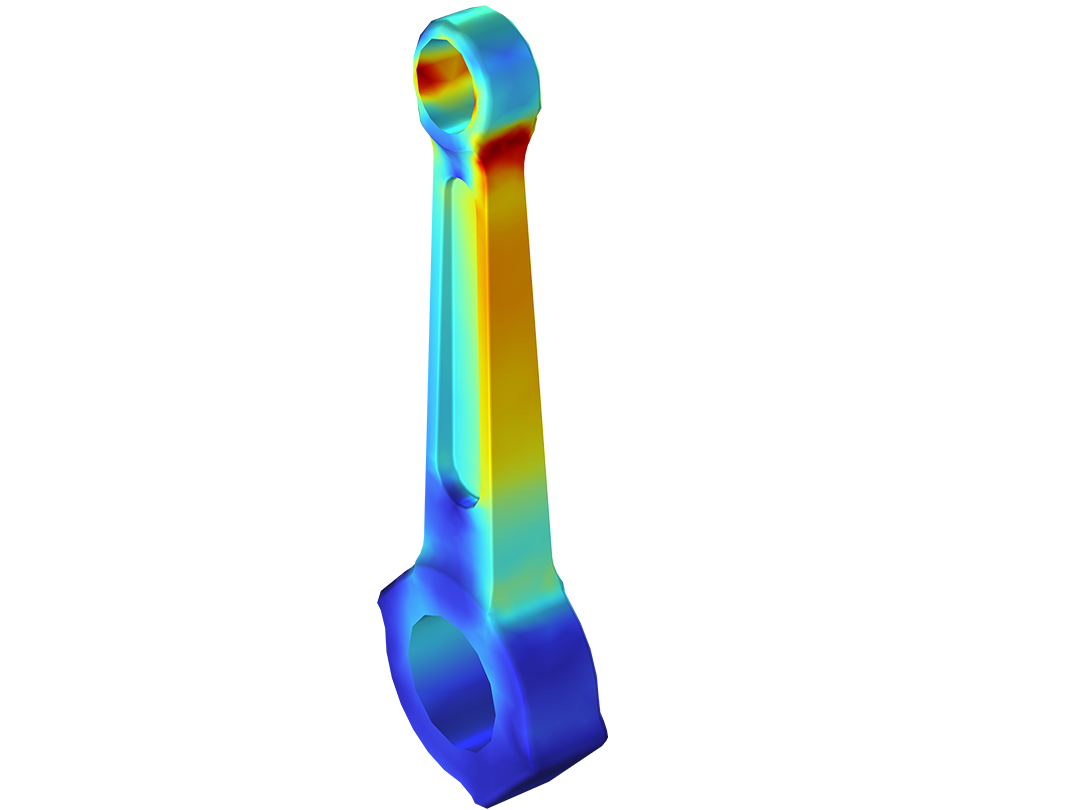
通常情况下,多体仿真中的全部或大部分部件都被视为刚性,因此仅通过刚体自由度进行描述。但在某些情况下,可能需要将一个或多个部件表示为柔性。利用本模块内置的材料模型,用户可以选择性地为模型中的部件指派刚性或柔性属性,从而进行包含非线性材料效应的详细结构分析。例如,该模块可用于计算结构中刚性部件关节处所受的力,以及柔性部件中产生的应力。