最新内容

如何将多分支井的石油开采成本降到最低
在石油和燃气行业,如何进行安全且经济的钻井是一个重大问题。除了常规的探井风险,油井本身也具有无法预知和不可避免的未知风险。本篇博文主要介绍如何通过数值仿真来避免这些未知风险,目的是通过对多分支井的稳定性进行分析,确定该油井是否需要采用昂贵的机械加固。
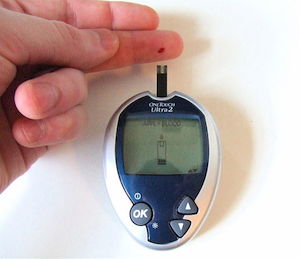
糖尿病管理的电化学建模
对于糖尿病这一全球性杀手,目前还没有有效治愈手段:据世界卫生组织估计,全世界范围内有 3.5 亿的糖尿病患者,年平均死亡率在 1% 左右。幸运的是,现代医学使糖尿病患者能够管理自身的葡萄糖水平和摄入量,因此在许多国家糖尿病的威胁已大为降低。多数糖尿病患者必须全天候监测他们的葡萄糖水平,这就需要有精确的方法来测量血液中的葡萄糖浓度。对于现代传感器的设计而言,电化学方法是一个很好的选择。
使用冷冻疗法治疗病变的生物组织
随着技术的进步,可以更快速且低痛苦地治疗病变生物组织。类似冷冻疗法类等的技术,可以在治疗内部及外部组织病变的同时,减少给患者带来的不适感。

相变:金属的冷却和凝固
相变:由于温度的变化,物质从一种状态转变为另一种状态。学习如何在连铸工艺中建立相变模型。
先吃后研究:探索鸡蛋在烘焙中的作用
发酵、粘合、湿润:鸡蛋在烘焙中通常扮演三种角色。在博客上了解更多关于用鸡蛋烘焙的科学知识,以及素食烘焙食品的比较。

电子能量分布函数
在这里,我们讨论了电子能量分布函数(EEDF)如何影响等离子体建模结果。

使用仿真技术优化连铸工艺
为了优化连铸的炼钢工艺,SMS conast 的研究人员选择了仿真。结果怎样?台湾的一家炼钢厂每年减少二氧化碳排放量约 4 万吨。
利用基于方程的建模理解交通拥堵
我们都曾因为堵车而感到无聊和沮丧。通常,交通堵塞的出现或消失都没有明显原因。我们利用气体动力学类比法,同时使用 COMSOL Multiphysics 基于方程的建模功能模拟了交通流,希望能更好地了解为什么会出现交通堵塞。

参数化扫描、特征频率和瞬态问题的合并解
在之前的博客文章中,我们讨论了在 COMSOL Multiphysics 中求解稳态问题的合并解特征。本篇博文,我们将介绍参数化扫描、特征频率、频域和瞬态问题的合并解。此外,我们还将合并解与内置的 with 算子和 at 算子进行了对比。

髋关节中的模块化植入物的应力和疲劳
模块化植入物(如置换关节)设计过程的一个关键部分是研究部件的模块化组合在动态载荷和应力下的行为。
对锂离子电池进行建模以提升质量和安全性
对于锂离子电池而言,质量和安全性是最重要的设计要素。Intertek Semko AB 每年要对 20000 个电池做出评估,当然更加理解这一点。
棒球投球背后的物理学
职业棒球投手们可以在投球时使它向左、向右、向下,甚至向上(有点类似)运动,以使球避开对面的击球手。这背后的物理学就可以通过马格努斯效应解释。
采用声悬浮技术精准制药
制造药品时需要无污染的空间,因此科学家尝试了许多创新的方法来改进相关工艺。在阿贡国家实验室(Argonne National Lab),曾希望能够创建一种可以在稀薄空气中漂浮和旋转化学化合物的设备并予以实现。这种设备可以非常精确地控制所需的每种化学药品的量,并将外部杂质破坏结果的风险降到最低。 声音如何举升物体 阿贡国家实验室(Argonne)的研究人员使用多物理场仿真和试错原型制作来提升声学悬浮装置的效率。当我们需要移动对象时,声音可能不是我们通常可以采用的工具。那么,如何利用声音在实验室环境中使物体漂浮或悬浮?答案在于以正确的方式组合力即可产生提升力。 当声音振动通过空气等介质传播时,所产生的压缩是可测且真实的。通过组合声泳力、重力和阻力等压力,不仅足以提升液体药物之类的材料,而且还可以根据操作员的需要对药物进行定位、旋转和移动。 声学悬浮器的换能器之间的波所产生的压力袋会在粒子尺度上产生较大的提升力。 结晶之前旋转药滴 通过使液滴保持稳定旋转,在药物保持液态和无定形状态下,研究人员能够使其进行化学反应。这是创造一个安全、稳定的环境使药物正确合成的关键所在。 声学悬浮装置的几何建模 声学悬浮装置中的每种材料和尺寸都会影响该设备,包括是否按照最终设计进行正常工作,以及是否能根据使用它的科学家的需求进行精细调整。 该设备的几何形状包括两个小型压电传感器,它们像喇叭一样竖立在产生药物的工作区域的上方和下方,如下图所示。 声学悬浮器的波型由位于平坦相对的换能器上的高斯形状泡沫控制。 设计中最重要的部分可能是由聚苯乙烯制成,并覆盖每个换能器端部的高斯形状的泡沫,这种泡沫可以消除所需范围之外的声波,能作为滤波器来维持均匀、明确的驻波。 Argonne的团队耦合使用了COMSOL Multiphysics® 中的“声学模块”、“ CFD模块”和“粒子追踪模块”对声学悬浮器进行了建模。通过仿真,他们能够缩小声场的形状和浮动液滴的位置。 上图仿真结果显示,在T = 0.75秒时,颗粒形成了液滴。左侧显示了仿真中预期的粒子分布,右侧显示了液滴的实际分布的照片。 使用声学悬浮装置生产更安全、更精确的药物 声悬浮技术的发展以及能控制越来越精细的化学反应的能力,使药物科学界的成员扩展了其研究领域,未来也许会发现更多能够挽救生命的新药。 扩展阅读 了解有关通过声悬浮技术实现飘浮更多信息。
利用对称性简化磁场建模
介绍在电磁模型中可以利用的3种对称性边界条件。磁绝缘、完美磁导体和 1/8 对称性。

如何在 COMSOL Multiphysics 中合并解
在工程分析中,经常需要比较在不同工况下获得的解。可能包括比较不同载荷或参数配置的影响,以及在域的每个点上对解进行包络以找到最差或最佳的情况。对于上述每一种情况以及其他类似情况,我们都需要访问多个数据集。

在组件级别研究声呐系统
声音导航测距(SoNaR,更常见的是用小写字母表示的 “sonar”)技术可用于水下探测和通讯。为改进声呐系统,需从组件级别优化设计。声呐的一个主要组件是电声换能器。

风力涡轮机引起的海洋变化
将风力涡轮机放在海上的一个好处是什么?不能被听到它们的噪声! 还有更好方法吗?近海的大风发生得更有规律,使能源生产更有效!

电气设备的对流冷却仿真
在集群计算的帮助下,我们与 BLOCK transformoren 一起对电感器件的对流冷却进行了建模,以获得最佳性能。
马格努斯效应和世界杯比赛用球
贝克汉姆和马拉多纳用球鞋内侧踢出的弧线,以及埃德尔、内林霍,罗伯托·卡洛斯用球鞋外侧踢出的弧线,都是马格努斯效应 的结果。该效应以其发现者科学家马格努斯命名,在 19 世纪 50 年代,马格努斯首次在实验室中观察到了这种现象。马格努斯效应解释了同时旋转和前进的球所受到的侧向力。这里,我们用它来分析 FIFA 世界杯比赛用球。
借助多体分析改进高尔夫的挥杆
打高尔夫时,您的击球不光取决于肌肉力量,与高尔夫挥杆机理相关的其他一些因素会产生更重要的影响。我们将讨论如何通过对高尔夫挥杆的多体分析 来改进您的击球表现。

如何使用 COMSOL Multiphysics 模拟残余应力
学习如何在结构力学模型中计算残余应力。为了演示,我们使用了一个金属拉深工艺的示例。继续阅读…

使用 COMSOL 理解稳定性方法
在这里,我们提供了一个质量传输示例模型,以帮助描述稳定方法对您的数值模型的影响。
变形固体中的传热仿真
在之前的文章中,我们介绍了一些涉及静止固体耦合传热的应用。这些静止固体传热示例对将要求解的传热方程进行了简化处理,并且通常可以得到求解温度场的精确近似。当涉及传热和固体力学的多物理场耦合时,如何描述用于解释材料热弹性效应的相关物理场?
地热能:利用地热实现冬暖夏凉
利用地热调节室内温度具有成本低、可持续使用的特点。本文为地热能系列的第三篇博客文章,我们将详细探讨埋管集热器。由于对埋管集热器的热性能已做了准确预测,并且考虑了管道布置与局部热性质,因此“管道流模块”非常适合模拟这种集热器。