电池组的温度控制
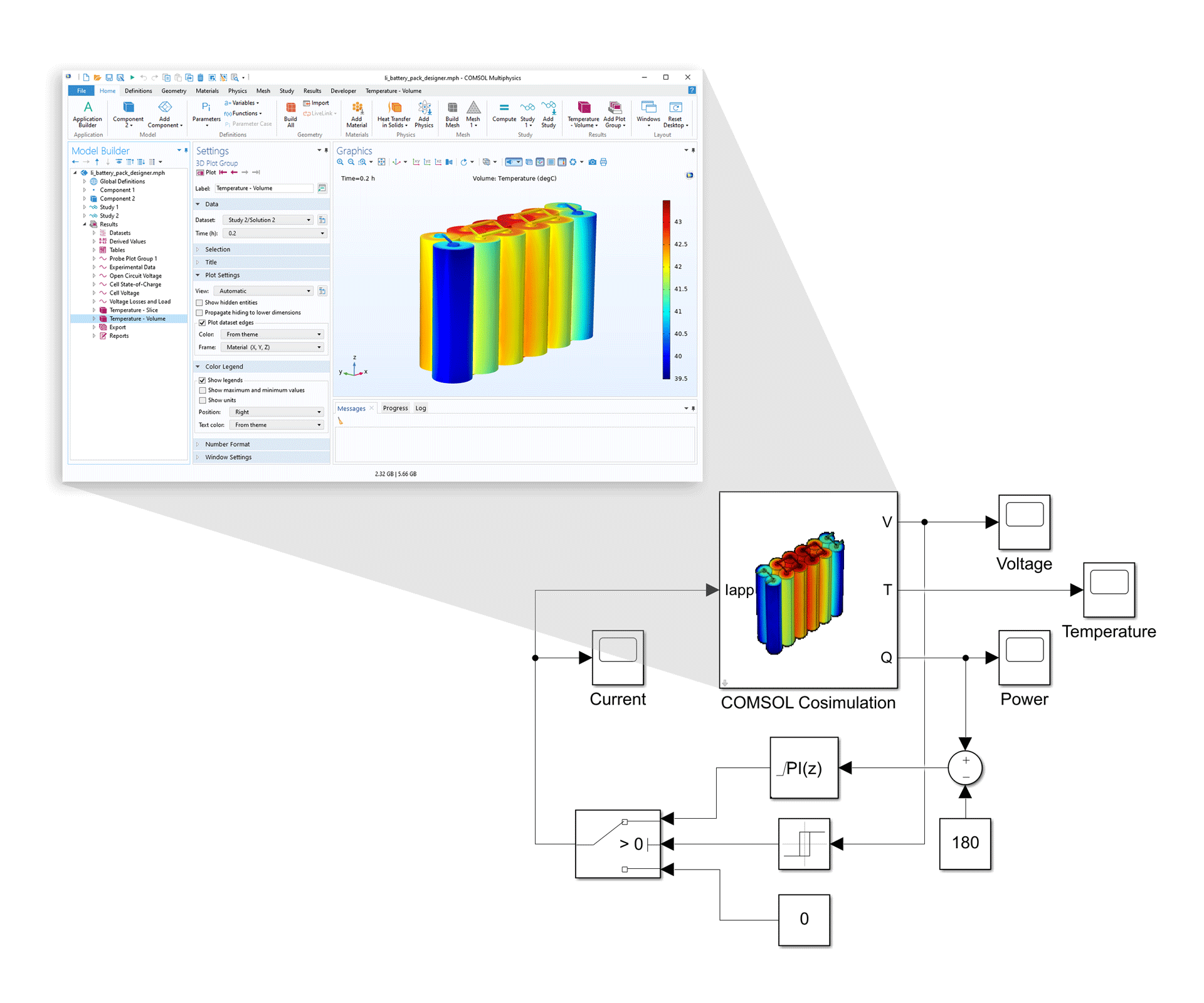
LiveLink™ for Simulink® 对于温度控制仿真非常有用,电池组放电控制与热分析 示例模型演示了这一功能。热管理在电池建模中非常重要,通过协同仿真,可以计算电池组在放电期间的温度分布,其中的电池组可以通过 COMSOL Multiphysics® 及附加的“电池模块”进行建模。示例中的这种特殊电池组配置,在诸如滑板、玩具、无人机和医疗器械之类的便携式设备中很常见。三维电池模型的电流在 Simulink® 中进行控制,以确保在使用过程中保持恒定的功率。
使用 LiveLink™ for Simulink® 将 COMSOL Multiphysics® 集成到 Simulink®
LiveLink™ for Simulink® 可以将COMSOL Multiphysics® 与 Simulink® 仿真环境无缝集成,作为 MATLAB® 附加产品来使用。借助此功能,您可以执行 COMSOL Multiphysics® 模型与 Simulink® 流程图的协同仿真。任何瞬态或稳态的 COMSOL Multiphysics® 模型都支持协同仿真。
除协同仿真以外,您还可以将 COMSOL Multiphysics® 模型降阶处理为状态空间形式,通过 MATLAB® 与 Simulink® 或 Control System Toolbox™ 结合使用,方便您进行控制设计和仿真。
通过协同仿真方法,COMSOL Multiphysics® 求解器可用于对动态模型进行时间积分或求解静态模型,这意味着由 COMSOL Multiphysics® 求解器求解的大模型也可用于协同仿真。借助于 LiveLink™ for Simulink®,您可以在设计控制系统时,同时加入 COMSOL Multiphysics® 模型来考虑物理效应的影响。
联系 COMSOL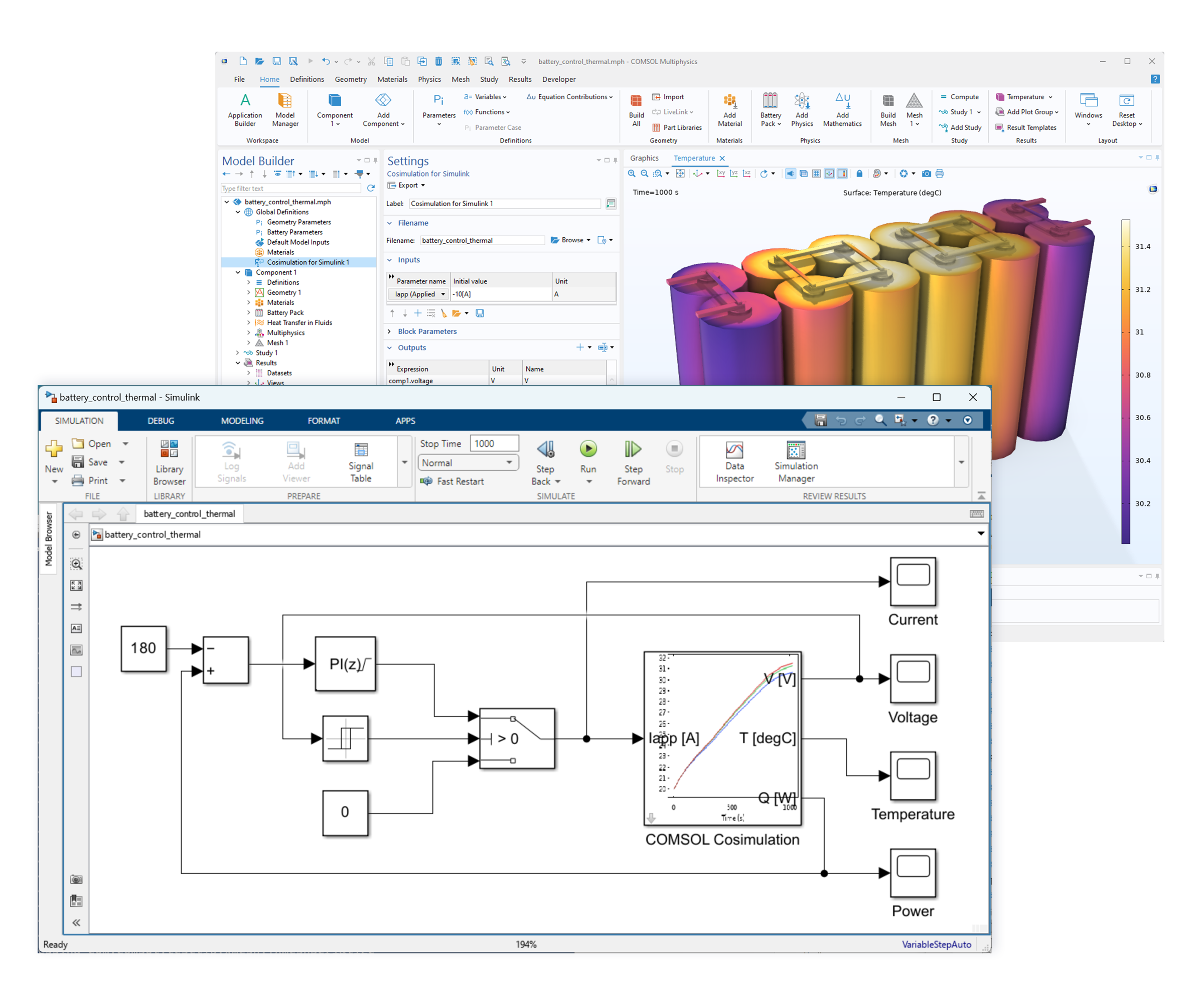
LiveLink™ for Simulink® 对于温度控制仿真非常有用,电池组放电控制与热分析 示例模型演示了这一功能。热管理在电池建模中非常重要,通过协同仿真,可以计算电池组在放电期间的温度分布,其中的电池组可以通过 COMSOL Multiphysics® 及附加的“电池模块”进行建模。示例中的这种特殊电池组配置,在诸如滑板、玩具、无人机和医疗器械之类的便携式设备中很常见。三维电池模型的电流在 Simulink® 中进行控制,以确保在使用过程中保持恒定的功率。
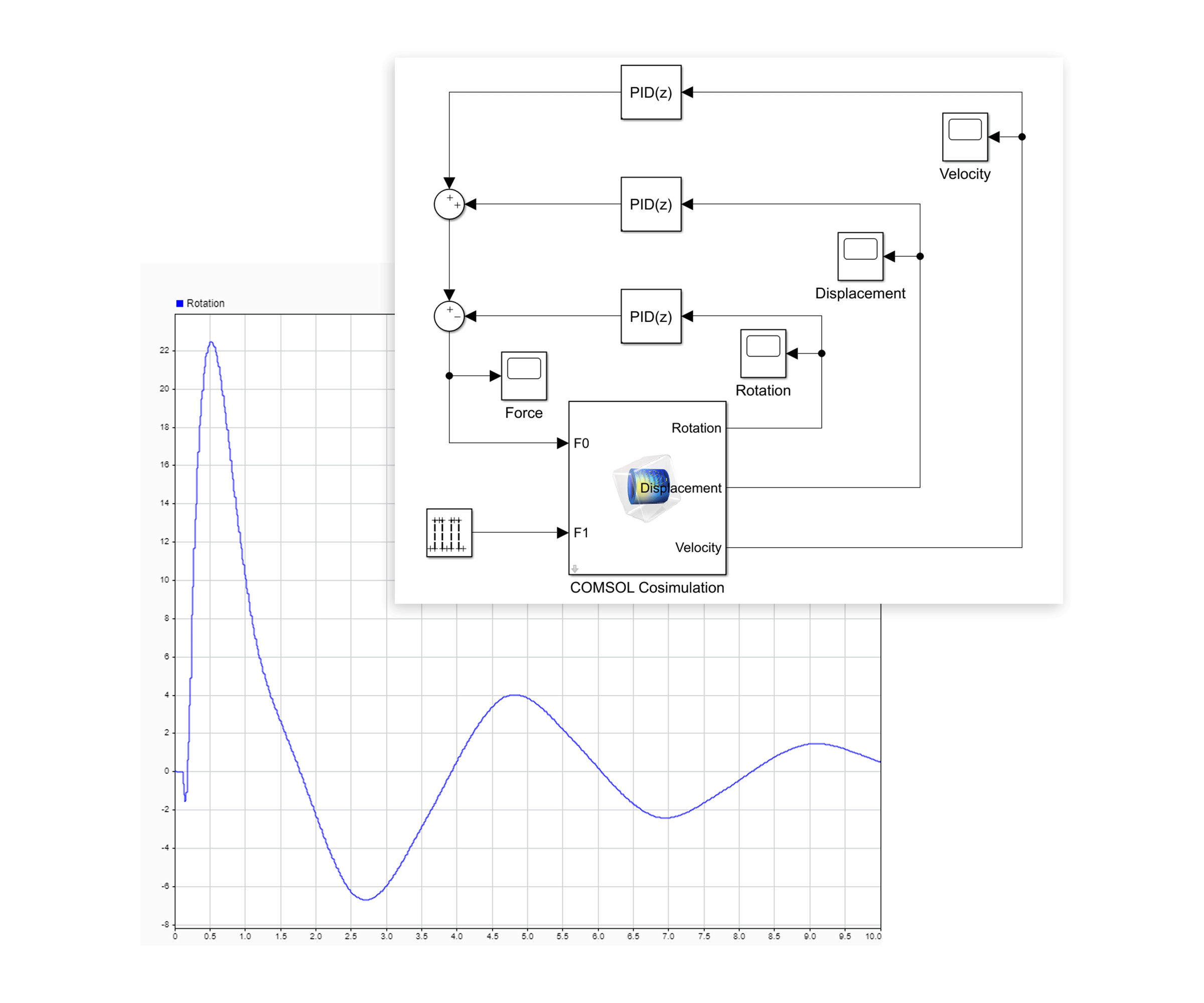
您可以使用 Simulink® 来控制刚体或柔体 COMSOL Multiphysics® 模型,通过“多体动力学模块”建模的倒立摆的控制 示例演示了这一功能。该示例采用 PID 控制器来控制倒立摆的基座位置,以保持其垂直位置的稳定;并根据摆的角度在基座位置施加一个外部平衡力,以防止其下落。此外,还将摆的位置限制在一定的范围内。

即使是 COMSOL Multiphysics® 静态模型,您也可以通过 LiveLink™ for Simulink® 执行协同仿真,电磁制动器 示例演示了相关操作。形式最简单的电磁制动器由一个导电材料盘和一块永磁体组成。磁体会产生一个恒定磁场,圆盘在其中旋转,当导体在磁场中运动时会产生感应电流,而电流产生的洛伦兹力会使圆盘的旋转变慢。这个模型是使用“AC/DC 模块”创建的,在 Simulink® 中基于感应扭矩和圆盘惯性矩来计算角速度,在 COMSOL Multiphysics® 中以三维电磁稳态研究计算感应扭矩。在这个示例中,使用 Simulink® 代替 COMSOL Multiphysics® 作为时间积分器,对角加速度进行积分以计算角速度。
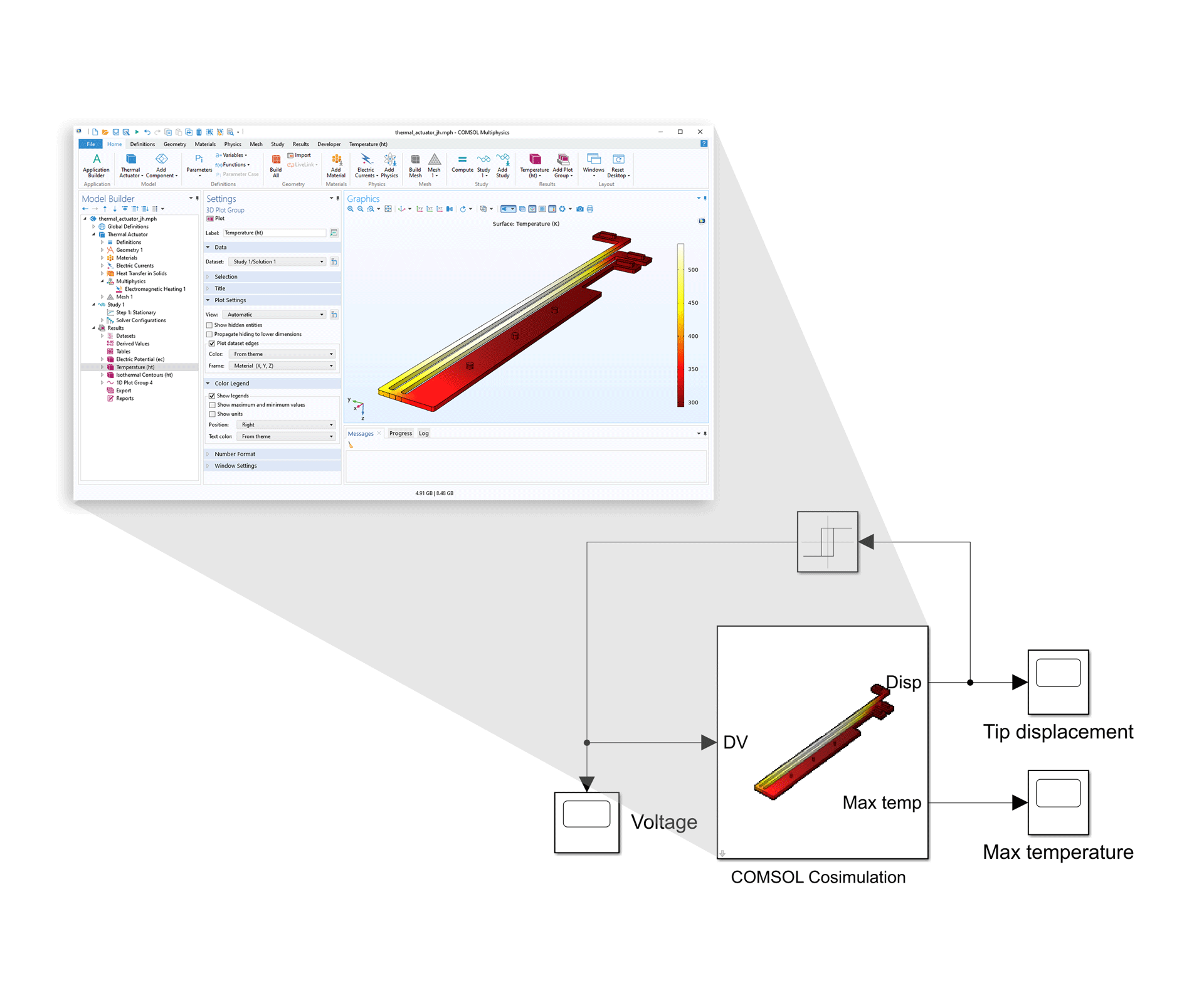
LiveLink™ for Simulink® 通过使用 COMSOL Multiphysics® 及其任意附加产品,使多物理场协同仿真成为可能,热执行器的开关控制 教学案例说明了这一点。该模型由一个多晶硅制成的双热臂热执行器组成,执行器通过热膨胀驱动,而这种臂产生变形使得执行器位移所需的温升则通过焦耳热来实现。与单个冷臂相比,热臂的膨胀更大,从而导致执行器弯曲。此外,该模型还举例说明了如何将以下三种物理场类型进行多物理场耦合:电流、传热和结构力学。其中通过控制外加电流,使执行器的挠度不超过给定值。控制器的开/关操作在 Simulink® 中实现。
请注意,LiveLink™ for Simulink® 不支持与“App 开发器”、COMSOL Compiler™ 或 COMSOL Server™ 一起使用。
Simulink 是 The MathWorks, Inc. 的注册商标。所有其他商标均为其各自所有者的财产。相关商标所有者的列表请参见商标页面。COMSOL AB 及其子公司和产品不与上述商标所有者相关联,亦不由其担保、赞助或支持。
COMSOL 是否能用于解决我的问题?
欢迎联系我们,我们的专业工程师可以协助您评估技术可行性,并根据使用场景推荐许可形式。
点击右侧的“联系 COMSOL”按钮,填写并提交信息,我们的工作人员将会尽快与您联系。
评估与试用 COMSOL® 软件